Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (1): 162-173.doi: 10.13229/j.cnki.jdxbgxb20211217
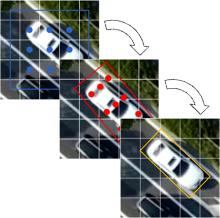
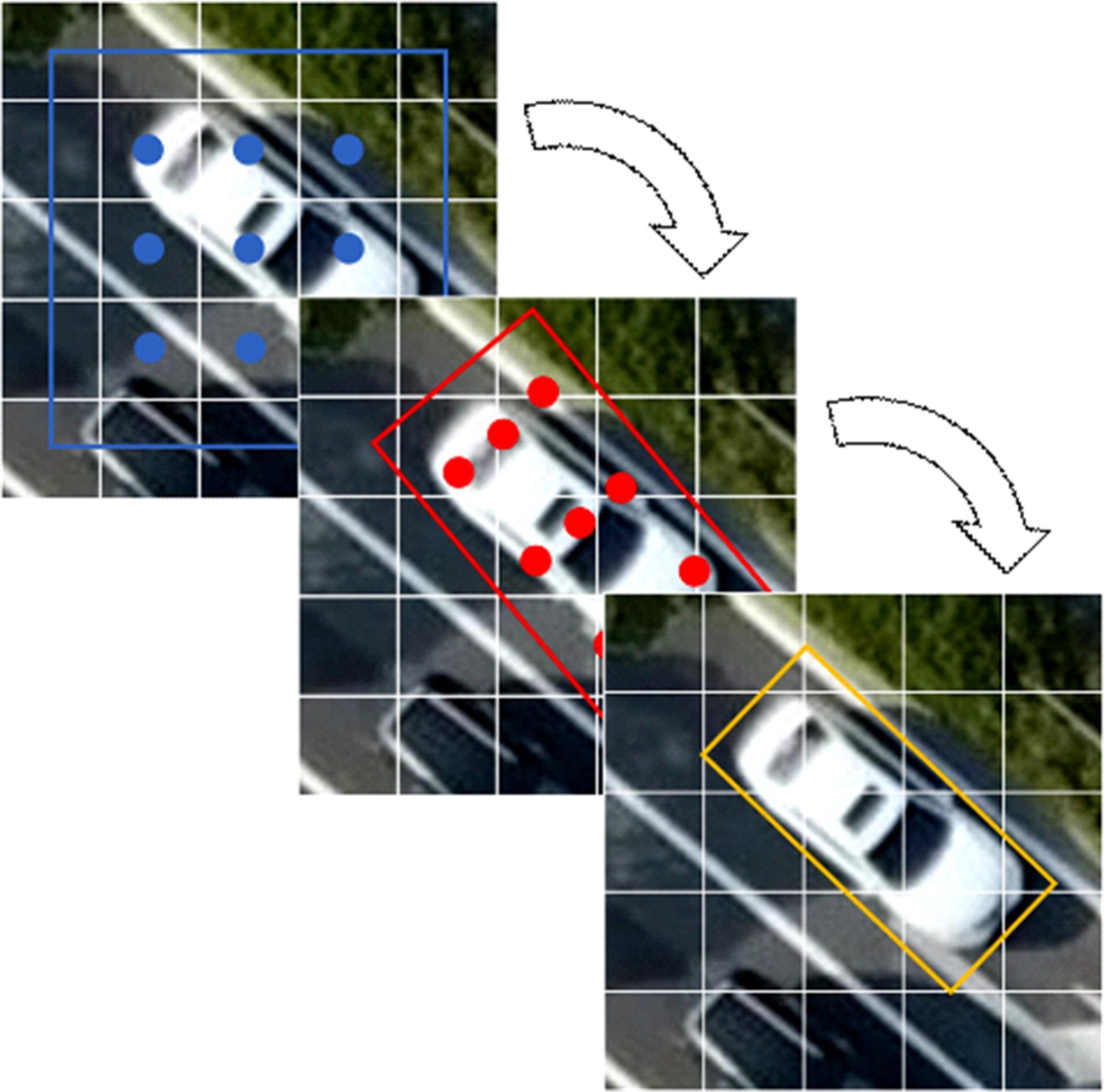
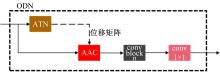
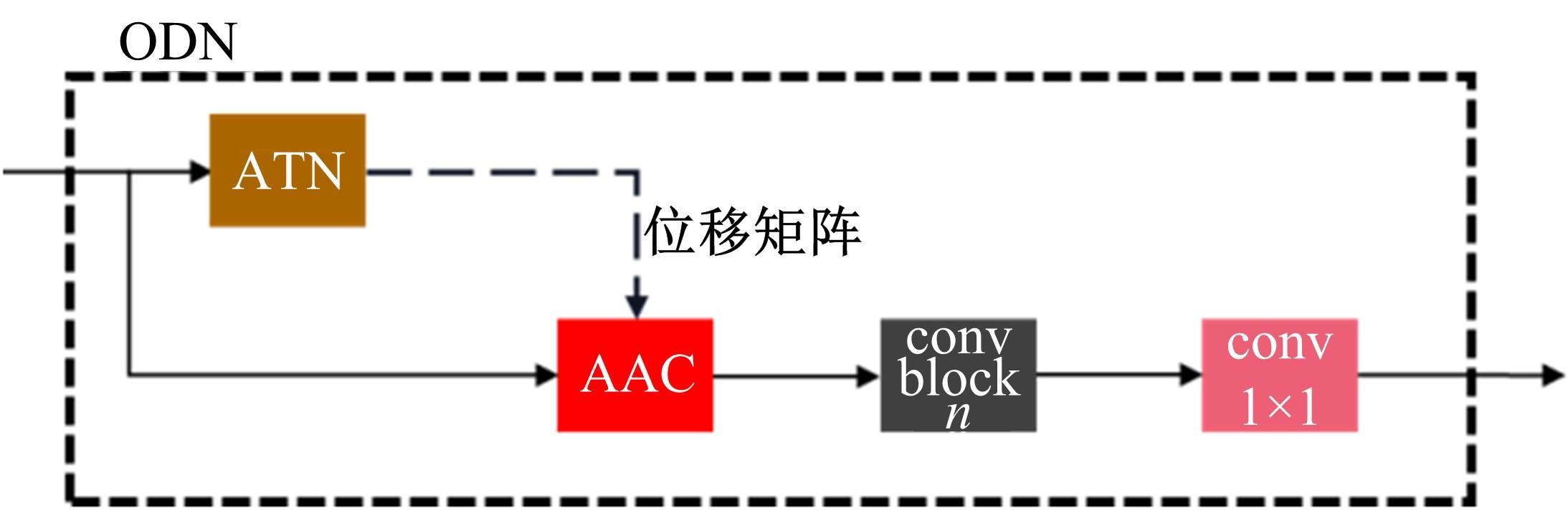
Single-stage rotated object detection network based on anchor transformation
You QU( ),Wen-hui LI()
),Wen-hui LI()
- College of Computer Science and Technology,Jilin University,Changchun 130012,China
CLC Number:
- TP391


| 1 | Liu W, Anguelov D, Erhan D, et al. SSD: single shot multibox detector[C]∥European Conference on Computer Vision, Amsterdam, The Netherlands,2016: 21-37. |
| 2 | Ren S, He K, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 3 | Redmon J, Farhadi A. YOLOv3: an incremental improvement[J/OL].[2018-12-10]. . |
| 4 | 李熙莹, 陆强, 张晓春, 等. 基于人车交互行为模型的上下客行为识别[J]. 中国公路学报, 2021, 34(7): 152-163. |
| Li Xi-ying, Lu Qiang, Zhang Xiao-chun, et al. Identification of on-off passenger behavior based on human-vehicle interaction model[J]. China Journal of Highway and Transport, 2021, 34(7): 152-163. | |
| 5 | 金立生, 郭柏苍, 王芳荣, 等. 基于改进YOLOv3的车辆前方动态多目标检测算法[J]. 吉林大学学报:工学版, 2021,51(4): 1427-1436. |
| Jin Li-sheng, Guo Bo-cang, Wang Fang-rong, et al. Vehicle forward dynamic multi-target detection algorithm based on improved YOLOv3[J]. Journal of Jilin University (Engineering and Technology Edition), 2021,51(4): 1427-1436. | |
| 6 | 姜迪, 刘慧, 李钰, 等.结合稠密特征映射的CT图像肿瘤分割模型[J]. 计算机辅助设计与图形学学报, 2021, 33(8): 1273-1286. |
| Jiang Di, Liu Hui, Li Yu, et al. Tumor segmentation model for CT images combined with dense feature mapping[J]. Journal of Computer-Aided Design & Graphics, 2021, 33(8): 1273-1286. | |
| 7 | 于博文, 吕明. 改进的YOLOv3算法及其在军事目标检测中的应用[J/OL]. [2021-11-03].. |
| 8 | 詹光莉,刘辉, 杨路. 基于改进注意力W-Net的工业烟尘图像分割[J/OL]. [2021-11-03].. |
| 9 | Liu M, Wang X, Zhou A, et al. UAV-YOLO: small object detection on unmanned aerial vehicle perspective[J]. Sensors, 2020, 20(8): 2238. |
| 10 | Chen L, Zhang Z, Peng L. Fast single shot multibox detector and its application on vehicle counting system[J]. IET Intelligent Transport Systems, 2018, 12(10): 1406-1413. |
| 11 | Zhu J, Sun K, Jia S, et al. Urban traffic density estimation based on ultrahigh-resolution UAV video and deep neural network[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(12): 4968-4981. |
| 12 | Gao P, Tian J, Tai Y, et al. Vehicle detection with bottom wnhanced retinaNet in aerial images[C]∥IEEE International Geoscience and Remote Sensing Symposium, Waikoloa Village,USA,2020: 1173-1176. |
| 13 | Misra D. Mish: a self regularized non-monotonic neural activation function[J/OL].[2020-12-10]. , 2020. |
| 14 | Huang G, Liu Z, Maaten L V D, et al. Densely connected convolutional networks[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Honolulu,USA,2017: 2261-2269. |
| 15 | Yang X, Yang J, Yan J, et al. SCRDet: towards more robust detection for small, cluttered and rotated objects[C]∥ IEEE/CVF International Conference on Computer Vision, Seoul, South Korea,2019: 8231-8240. |
| 16 | Qian W, Yang X, Peng S, et al. Learning modulated loss for rotated object detection[J/OL].[2019-10-24]. . |
| 17 | Dai J, Qi H, Xiong Y, et al. Deformable convolutional networks[C]∥IEEE International Conference on Computer Vision, Venice, Italy, 2017: 764-773. |
| 18 | Fan H, Du D, Wen L, et al. VisDrone-MOT2020: the vision meets drone multiple object tracking challenge results[C]∥European Conference on Computer Vision, Online, 2020: 713-727. |
| 19 | Yu H, Li G, Zhang W, et al. The unmanned aerial vehicle benchmark: object detection, tracking and baseline[J]. International Journal of Computer Vision, 2020, 128(5): 1141-1159. |
| 20 | Wang J, Chen K, Yang S, et al. Region proposal by guided anchoring[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2019: 2965-2974. |
| 21 | Xu Y, Fu M, Wang Q, et al. Gliding vertex on the horizontal bounding box for multi-oriented object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 43(4): 1452 - 1459. |
| 22 | Wang J, Yang W, Li H-C, et al. Learning center probability map for detecting objects in aerial images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(5): 4307-4323. |
| 23 | Yang X, Liu Q, Yan J, et al. R3Det: refined single-stage detector with feature refinement for rotating object[J/OL].[2020-10-27]. . |
| [1] | Zhou-zhou LIU,Qian-yun ZHANG,Xin-hua MA,Han PENG. Compressed sensing signal reconstruction based on optimized discrete differential evolution algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2246-2252. |
| [2] | Hong-wei ZHAO,Dong-sheng HUO,Jie WANG,Xiao-ning LI. Image classification of insect pests based on saliency detection [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2174-2181. |
| [3] | Jie ZHANG,Wen JING,Fu CHEN. Vulnerability detection of instant messaging network protocol based on passive clustering algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2253-2258. |
| [4] | Dong-ming SUN,Liang HU,Yong-heng XING,Feng WANG. Text fusion based internet of things service recommendation for trigger⁃action programming pattern [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2182-2189. |
| [5] | Sheng-sheng WANG,Jing-yu CHEN,Yi-nan LU. COVID⁃19 chest CT image segmentation based on federated learning and blockchain [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2164-2173. |
| [6] | Li-li REN,Zhi-jun WANG,Dong-mei YAN. Improved multi⁃verse algorithm with combined slime mould foraging behavior [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2190-2197. |
| [7] | Jun-cong LIN,Jun LEI,Meng CHEN,Shi-hui GUO,Xing GAO,Ming-hong LIAO. Real⁃time camera planning for dynamic multiple targets considering cinematographic visual properties [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2154-2163. |
| [8] | Yin-di YAO,Jun-jin HE,Yang-li LI,Dang-yuan XIE,Ying LI. ET0 simulation of self⁃constructed improved whale optimized BP neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1798-1807. |
| [9] | Li-li DONG,Dan YANG,Xiang ZHANG. Large⁃scale semantic text overlapping region retrieval based on deep learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1817-1822. |
| [10] | Hong-wei ZHAO,Zi-jian ZHANG,Jiao LI,Yuan ZHANG,Huang-shui HU,Xue-bai ZANG. Bi⁃direction segmented anti⁃collision algorithm based on query tree [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1830-1837. |
| [11] | Meng-su ZHANG,Chun-tian LIU,Xi-jin LI,Yong-ping HUANG. Design of fuzzy comprehensive evaluation system for performance appraisal based on K⁃means clustering algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1851-1856. |
| [12] | Jie CAO,Xue QU,Xiao-xu LI. Few⁃shot image classification method based on sliding feature vectors [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1785-1791. |
| [13] | Xiao-xue SUN,Hui ZHONG,Hai-peng CHEN. Statistical analysis system for students' examination results based on decision tree classification technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1866-1872. |
| [14] | Li-sheng JIN,Bai-cang GUO,Fang-rong WANG,Jian SHI. Dynamic multiple object detection algorithm for vehicle forward based on improved YOLOv3 [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1427-1436. |
| [15] | Chun-bo WANG,Xiao-qiang DI. Cloud storage integrity verification audit scheme based on label classification [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1364-1369. |
|
||