Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (3): 810-822.doi: 10.13229/j.cnki.jdxbgxb20220592
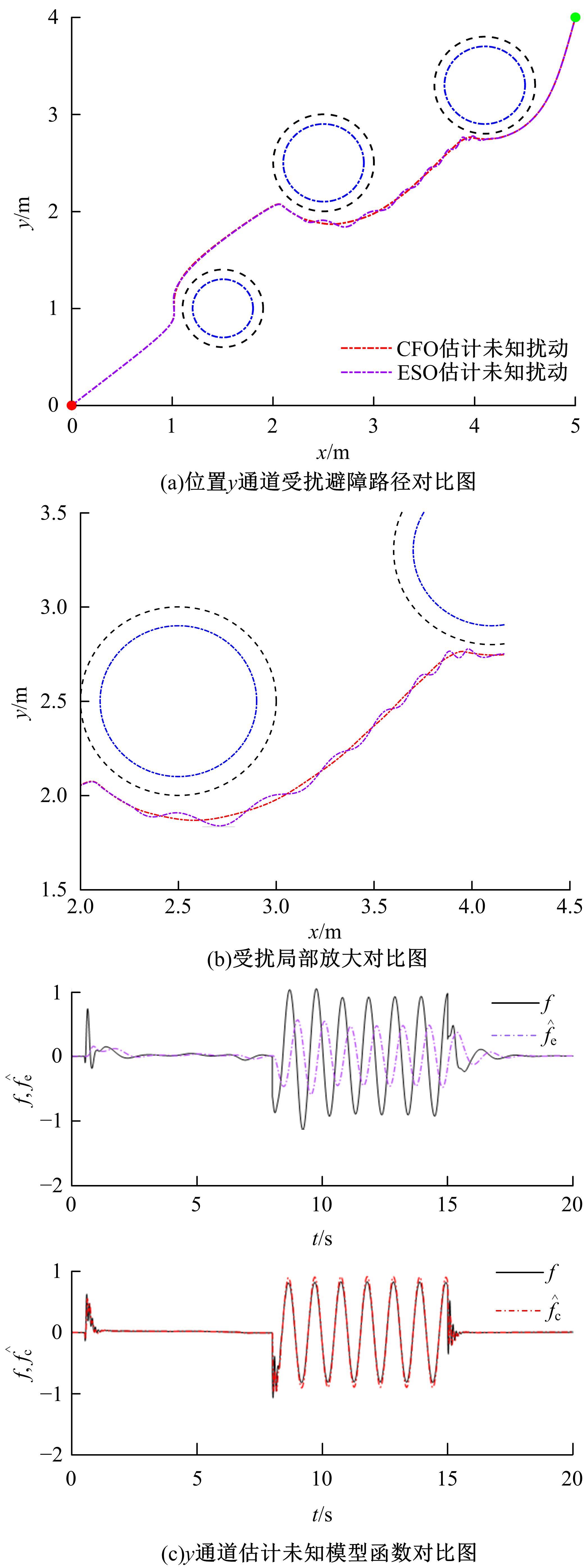
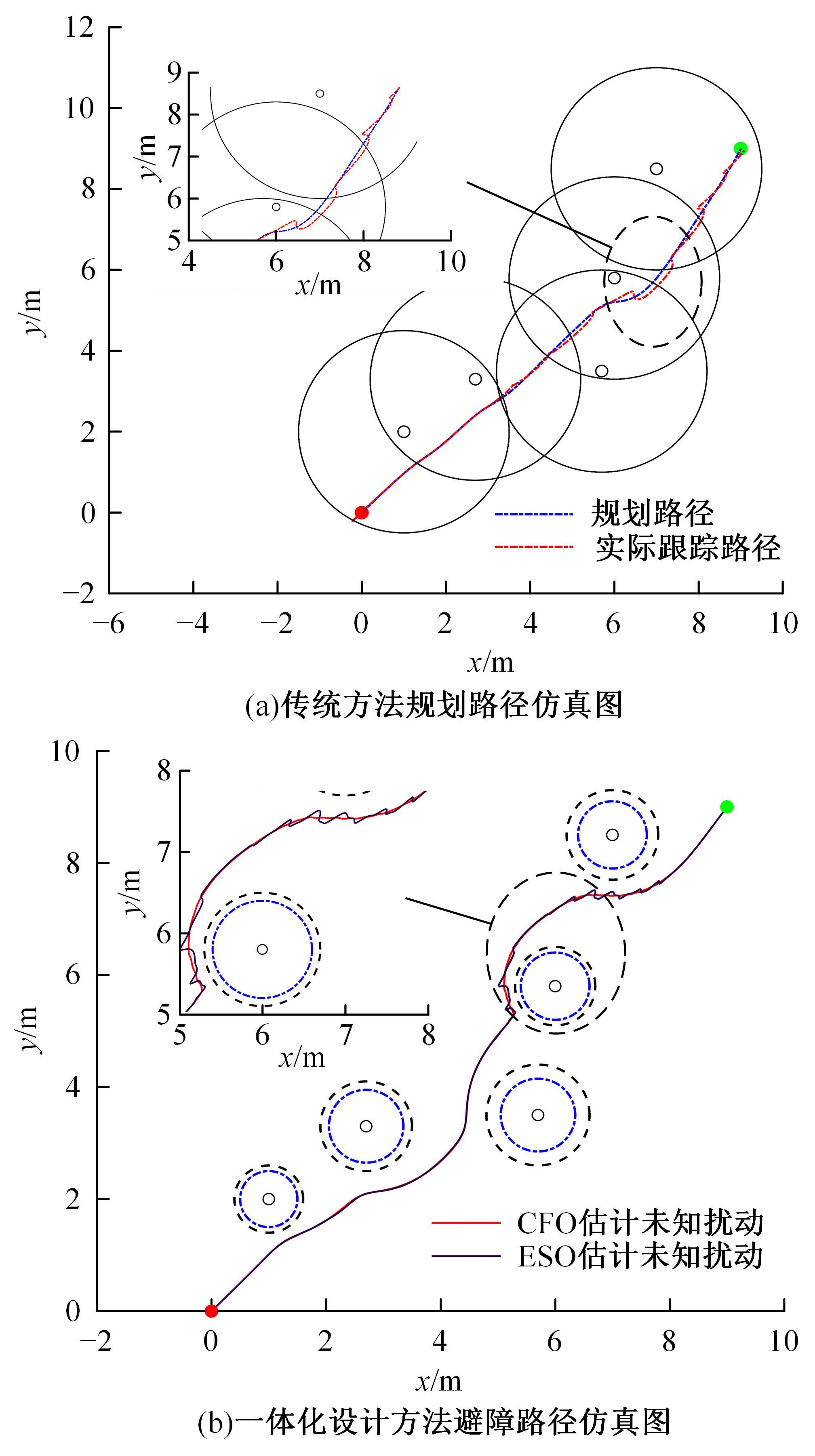
Observer⁃based control⁃anti⁃disturbance⁃obstacle avoidance of quadrotor unmanned aerial vehicle
Guo-yuan QI( ),Hao CHEN
),Hao CHEN
- Tianjin Key Laboratory of Intelligent Control of Electrical Equipment,Tiangong University,Tianjin 300387,China
CLC Number:
- V249.12



| 1 | Zhang Y, Chen Z, Zhang X, et al. A novel control scheme for quadrotor UAV based upon active disturbance rejection control[J]. Aerospace Science and Technology, 2018, 79: 601-609. |
| 2 | 吴跃文, 郑柏超, 李惠. 四旋翼无人机的滑模自抗扰姿态控制器设计[J]. 电光与控制, 2022, 29(1): 93-98. |
| Wu Yue-wen, Zheng Bo-chao, Li Hui. Attitude controller for quadrotor via active disturbance rejection control and sliding mode control[J]. Electronics Optics & Control, 2022, 29(1): 93-98. | |
| 3 | 张宏宏, 甘旭升, 毛亿, 等. 无人机避障算法综述[J]. 航空兵器, 2021, 28(5): 53-63. |
| Zhang Hong-hong, Gan Xu-sheng, Mao Yi, et al. Review of UAV obstacle avoidance algorithms[J]. Aero Weaponry, 2021, 28(5): 53-63. | |
| 4 | 吴健发, 王宏伦, 刘一恒, 等. 无人机避障航路规划方法研究综述[J]. 无人系统技术, 2020, 3(1): 1-10. |
| Wu Jian-fa, Wang Hong-lun, Liu Yi-heng, et al. Review on UAV path planning methods for obstacle avoidance[J]. Unmanned Systems Technology, 2020, 3(1): 1-10. | |
| 5 | Duchoň F, Babinec A, Kajan M, et al. Path planning with modified a star algorithm for a mobile robot[J]. Procedia Engineering, 2014, 96: 59-69. |
| 6 | Bakdi A, Hentout A, Boutami H, et al. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control[J]. Robotics and Autonomous Systems, 2017, 89: 95-109. |
| 7 | Das P K, Behera H S, Panigrahi B K. A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning[J]. Swarm and Evolutionary Computation, 2016, 28: 14-28. |
| 8 | Qian K, Liu Y, Tian L, et al. Robot path planning optimization method based on heuristic multi-directional rapidly-exploring tree[J]. Computers & Electrical Engineering, 2020, 85: No. 106688. |
| 9 | Khatib O. Real-time Obstacle Avoidance for Manipulators and Mobile Robots[C]∥1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA 1986: 396-404. |
| 10 | Ge S S, Cui Y J. New potential functions for mobile robot path planning[J]. IEEE Transactions on Robotics and Automation, 2000, 16(5): 615-620. |
| 11 | Cao L, Qiao D, Xu J. Suboptimal artificial potential function sliding mode control for spacecraft rendezvous with obstacle avoidance[J]. Acta Astronautica, 2018, 143: 133-146. |
| 12 | 韦意豪. 四旋翼无人机轨迹跟踪与避障控制研究[D]. 哈尔滨: 哈尔滨工业大学航天学院, 2018. |
| Wei Yi-hao. Rajectory tracking and obstacle avoidance of quadrotor[D]. Harbin: School of Astronautics,Harbin Institute of Technology, 2018. | |
| 13 | Tee K P, Ge S S, Tay E H. Barrier lyapunov functions for the control of output-constrained nonlinear systems[J]. Automatica, 2009, 45(4): 918-927. |
| 14 | 张勇, 陈增强, 张兴会, 等. 基于自抗扰的四旋翼无人机动态面姿态控制[J]. 吉林大学学报:工学版, 2019, 49(2): 562-569. |
| Zhang Yong, Chen Zeng-qiang, Zhang Xing-hui, et al. Dynamic surface attitude control of quad-rotor UAV based on ADRC[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(2): 562-569. | |
| 15 | Zhao Z H, Cao D, Yang J, et al. High-order sliding mode observer-based trajectory tracking control for a quadrotor UAV with uncertain dynamics[J]. Nonlinear Dynamics, 2020, 102(4): 2583-2596. |
| 16 | Han J Q. From PID to active disturbance rejection control[J]. IEEE transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| 17 | Guo B Z, Zhao Z. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems and Control Letters, 2011, 60(6): 420-430. |
| 18 | 陈增强, 程赟, 孙明玮, 等. 线性自抗扰控制理论及工程应用的若干进展[J]. 信息与控制, 2017, 46(3): 257-266. |
| Chen Zeng-qiang, Cheng Yun, Sun Ming-wei, et al. Surveys on theory and engineering applications for linear active disturbance rejection control[J]. Information and Control, 2017, 46(3): 257-266. | |
| 19 | Qi G Y, Li X, Chen Z Q. Problems of extended state observer and proposal of compensation function observer for unknown model and application in UAV[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(5): 2899-2910. |
| 20 | Bi H Y, Qi G Y, Hu J B. Modeling and analysis of chaos and bifurcations for the attitude system of a quadrotor unmanned aerial vehicle[J]. Complexity, 2019, 2019(3): 1-16. |
| 21 | Zhao B, Xian B, Zhang Y, et al. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J]. IEEE Transactions on Industrial Electronics, 2014, 62(5): 2891-2902. |
| 22 | Qi G Y, Ma S L, Guo X T, et al. High-order differential feedback control for quadrotor UAV: theory and experimentation[J]. Electronics, 2020, 9(12): No.2001. |
| 23 | 于慧, 郭宗和, 秦志昌. 基于改进人工势场的智能车动态避障算法[J]. 山东理工大学学报:自然科学版, 2021, 35(4): 56-62. |
| Yu Hui, Guo Zong-he, Qin Zhi-chang. Dynamic obstacle avoidance algorithm of intelligent vehicles based on improved artificial potential field[J]. Journal of Shandong University of Technology (Natural Science Edition), 2021, 35(4): 56-62. | |
| 24 | 李霞, 齐国元, 郭曦彤, 等. 高阶微分反馈控制及在四旋翼飞行器中的应用[J]. 航空学报, 2022, 43(12):434-444. |
| Li Xia, Qi Guo-yuan, Guo Xi-tong, et al. High-order differential feedback control and its application in quadrotor UAV[J]. Acta Aeronautica et Astronautica Sinica,2022, 43(12):434-444. | |
| 25 | Qi G Y, Chen Z Q, Yuan Z Z. Model-free control of affine chaotic systems[J]. Physics Letters A, 2005, 344(2-4): 189-202. |
| 26 | Qi G Y, Chen Z Q, Yuan Z Z. Adaptive high order differential feedback control for affine nonlinear system[J]. Chaos, Solitons and Fractals, 2008, 37(1): 308-315. |
| [1] | Hong-yan GUO,Wen-ya YU,Jun LIU,Qi-kun DAI. Integrated moving horizon decision⁃making method for lane and speed of intelligent vehicle in complex scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 693-703. |
| [2] | De-jun WANG,Kai-ran ZHANG,Peng XU,Tian-biao GU,Wen-ya YU. Speed planning and control under complex road conditions based on vehicle executive capability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 643-652. |
| [3] | De-feng HE,Dan ZHOU,Jie LUO. Efficient cooperative predictive control of predecessor⁃following vehicle platoons with guaranteed string stability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 726-734. |
| [4] | Jian-xin FENG,Qiang WANG,Ya-lei WANG,Biao XU. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1990-1996. |
| [5] | Hong-zhi WANG,Ting-ting WANG,Huang-shui HU,Xiao-fan LU. PID control based on BP neural network optimized by Q⁃learning for speed control of BLDCM [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2280-2286. |
| [6] | Yan MA,Jian-fei HUANG,Hai-yan ZHAO. Method of vehicle formation control based on vehicle to vehicle communication [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 711-718. |
| [7] | DENG Li-fei, SHI Yao-wu, ZHU Lan-xiang, YU Ding-li. Failure detection of closed-loop systems and application to SI engines [J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
|
||