Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (8): 2141-2148.doi: 10.13229/j.cnki.jdxbgxb.20221380
Previous Articles Next Articles
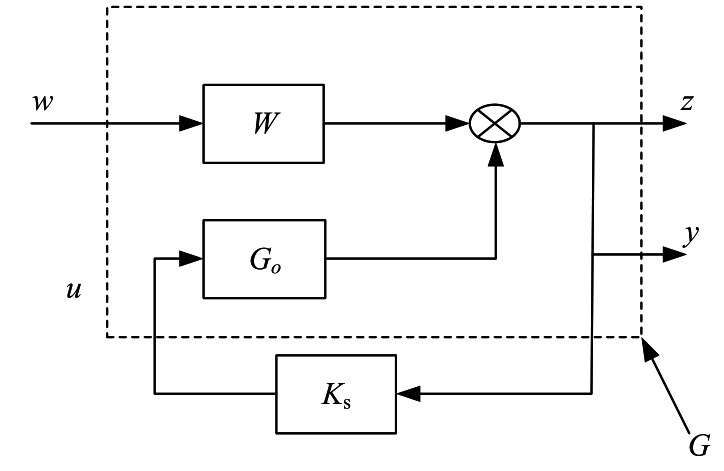
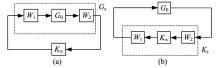
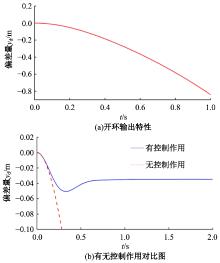
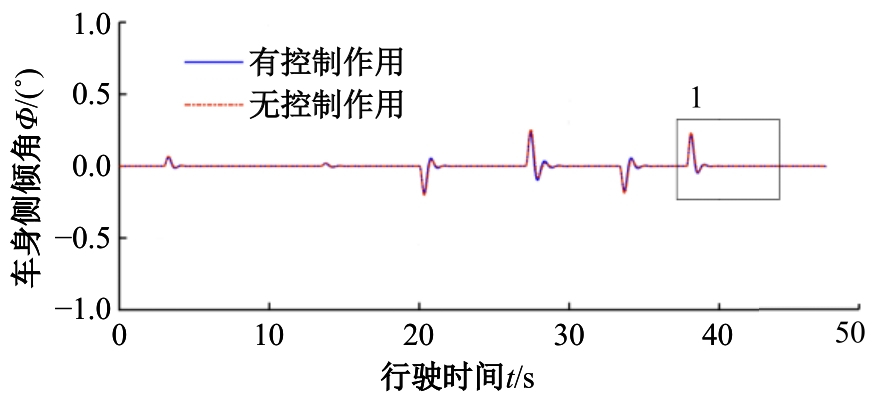
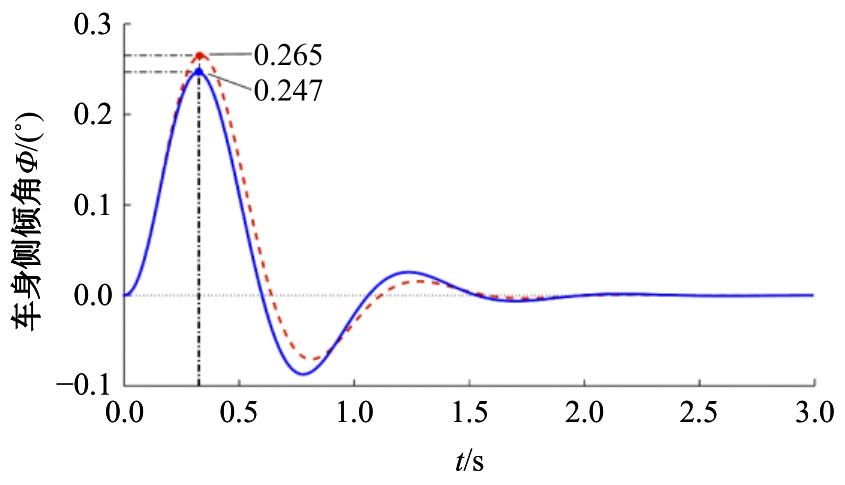
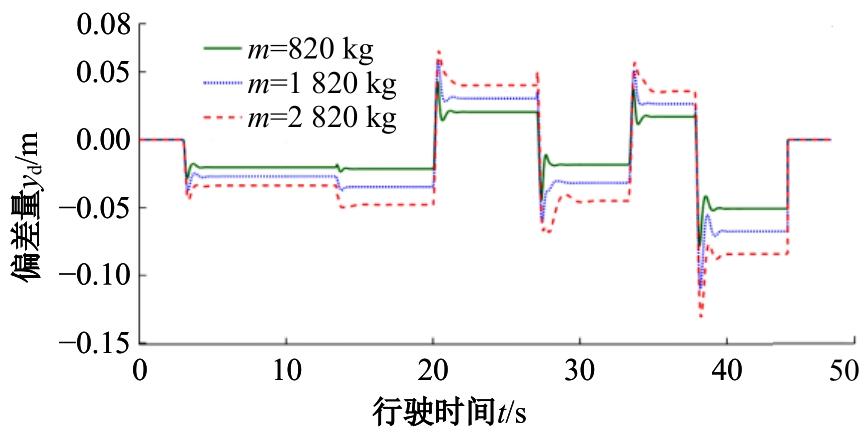
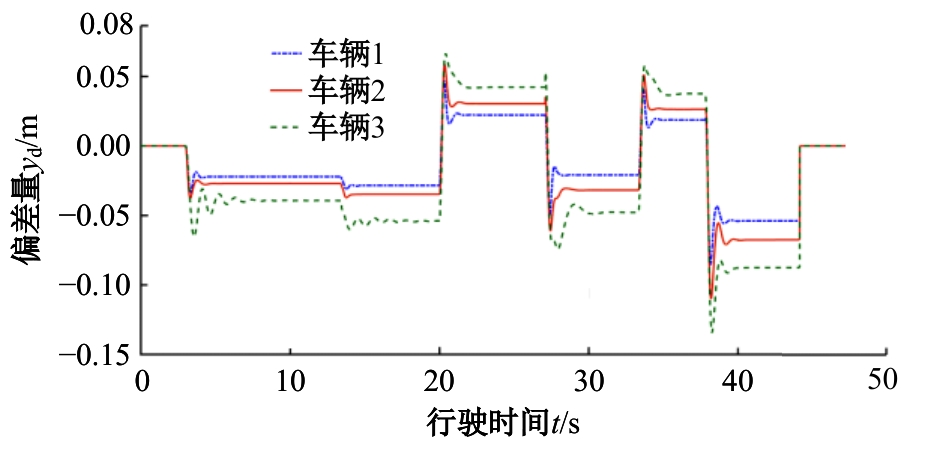
H∞ loop shaping robust control of vehicle tracking on variable curvature curve
Sheng CHANG1( ),Hong-fei LIU2(),Nai-wei ZOU3
),Hong-fei LIU2(),Nai-wei ZOU3
- 1.School of Automotive Engineering,Changshu Institute of Technology,Suzhou 215500,China
2.College of Transportation,Jilin University,Changchun 130022,China
3.College of Mechanical Engineering,Ningbo University of Technology,Ningbo 315336,China
CLC Number:
- U461.6





| 1 | 陈特,陈龙,徐兴,等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41(10): 1109-1116. |
| Chen Te, Chen Long, Xu Xing, et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41(10): 1109-1116. | |
| 2 | 余卓平,侯誉烨,熊璐,等. 基于反步法的差动转向无人车辆轨迹跟踪[J]. 汽车工程,2019, 41(11): 1229-1234. |
| Yu Zhuo-ping, Hou Yu-ye, Xiong Lu, et al. Trajectory tracking of skid steer unmanned vehicle based on backstepping[J]. Automotive Engineering, 2019, 41(11): 1229-1234. | |
| 3 | 孙浩,杜煜,卜德旭,等. 汽车轨迹跟踪模型预测控制的加速求解方法[J]. 湖南大学学报: 自然科学版, 2020, 47(10): 19-25. |
| Sun Hao, Du Yu, Bu De-xu, et al. Accelerated Solution method for vehicle trajectory tracking based on model predictive control[J]. Journal of Hunan University (Natural Sciences), 2020, 47(10): 19-25. | |
| 4 | 赵熙俊,陈慧岩. 智能车辆路径跟踪横向控制方法的研究[J]. 汽车工程, 2011, 33(5): 382-387. |
| Zhao Xi-jun, Chen Hui-yan. A study on lateral control method for the path tracking of intelligent vehicles[J]. Automotive Engineering, 2011, 33(5): 382-387. | |
| 5 | Chang S, Chen L L, Wu J F, et al. H∞ loop shaping robust control for tractor-semitrailer[C]//MATEC Web of Conferences ICMME2015. SINGAPORE: EDP Sciences, 2015: 05005p.1-05005p.5. |
| 6 | Mcfarlane D C, Glover K. Robust stabilization of normalized coprime factor plant descriptions with H∞- bounded uncertainty[J]. IEEE Transactions on Automatic Control, 1989, 34(8): 821-830. |
| 7 | Mcfarlane D C, Glover K. A loop shaping design procedure using H∞ synthesis[J]. IEEE Transactions on Automatic Control, 1992, 37(6): 759-769. |
| 8 | Zhou, K, Doyle J C. Essentials of Robust Control[M]. NY: Prentice-Hall, 1998. |
| 9 | 常胜,许洪国,刘宏飞. H∞回路成形半挂汽车列车鲁棒控制器设计[J]. 吉林大学学报: 工学版, 2011, 41(6): 1571-1576. |
| Chang Sheng, Xu Hong-guo, Liu Hong-fei. H∞ loop shaping robust controller design for tractor-semitrailer[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(6): 1571-1576. | |
| 10 | 常胜. 半挂汽车列车动态特性分析与鲁棒控制[D]. 长春:吉林大学交通学院, 2011. |
| Chang Sheng. Dynamic characteristics analysis and robust control of tractor-semitrailer[D]. Changchun: College of Transportation, Jilin University, 2011. | |
| 11 | ,中华人民共和国交通运输部公路线路设计规范 [S]. |
| [1] | Yu-hai WANG,Xiao-zhi LI,Xing-kun LI. Predictive energy saving algorithm for hybrid electric truck under high-speed condition [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2121-2129. |
| [2] | Jian-ze LIU,Jiang LIU,Min LI,Xin-jie ZHANG. Vehicle speed decoupling road identification method based on least squares [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 1821-1830. |
| [3] | Bin XIAN,Yin-xin WANG,Ling WANG. Distributed robust tracking control for multiple unmanned aerial vehicles: theory and experimental verification [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 2093-2103. |
| [4] | Xian-yi XIE,Ming-jun ZHANG,Li-sheng JIN,Bin ZHOU,Tao HU,Yu-fei BAI. Artificial bee colony trajectory planning algorithm for intelligent vehicles considering comfortable [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(6): 1570-1581. |
| [5] | Ling HUANG,Zuan CUI,Feng YOU,Pei-xin HONG,Hao-chuan ZHONG,Yi-xuan ZENG. Vehicle trajectory prediction model for multi-vehicle interaction scenario [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1188-1195. |
| [6] | Hong-yan GUO,Lian-bing WANG,Xu ZHAO,Qi-kun DAI. Joint estimation of vehicle mass and road slope considering lateral motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1175-1187. |
| [7] | Yu-kai LU,Shuai-ke YUAN,Shu-sheng XIONG,Shao-peng ZHU,Ning ZHANG. High precision detection system for automotive paint defects [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1205-1213. |
| [8] | Shao-hua WANG,Qi-rui ZHANG,De-hua SHI,Chun-fang YIN,Chun LI. Analysis of nonlinear vibration response characteristics of hybrid transmission system with dual-planetary gear sets [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 890-901. |
| [9] | Xue-jing DU,Ning WANG,Jie ZHANG,Yu-long PEI. Control strategy of lateral stability of semi-trailer train in dangerous section of cold area [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 996-1006. |
| [10] | Zhen-hai GAO,Rong-gui CAI,Tian-jun SUN,Tong YU,Hao-yuan ZHAO,Hao BAN. Data⁃filtering method for driving behavior based on vehicle shared autonomy [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 589-599. |
| [11] | Xian-yi XIE,Yu-han WANG,Li-sheng JIN,Xin ZHAO,Bai-cang GUO,Ya-ping LIAO,Bin ZHOU,Ke-qiang LI. Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 620-630. |
| [12] | Xiao-lin DENG,Fu-mo YANG,Shan-gan QIN. Comparative analysis on crashworthiness of a novel bamboo⁃like hexagonal gradient hierarchical multicellular tube [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 333-345. |
| [13] | Yi-gang WANG,Yu-peng WANG,Hao ZHANG,Si-an ZHAO. Identification and analysis of aerodynamic noise sources in the bogie area of high⁃speed trains [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 346-355. |
| [14] | Jian-jun NIE,Jun-kai HOU,Xiao-lin XIE,Hong-zhen YAN. Design and obstacle surmounting performance analysis of a novel mobile chassis for inspection robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 356-364. |
| [15] | Tie WANG,Xu-dong LI,Cheng TIAN,Hong-wei ZHAO. Building biaxial fatigue damage model of wheel rims based on multi-axial loads projection theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 99-104. |
|