Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (8): 2245-2255.doi: 10.13229/j.cnki.jdxbgxb.20230467
Previous Articles Next Articles
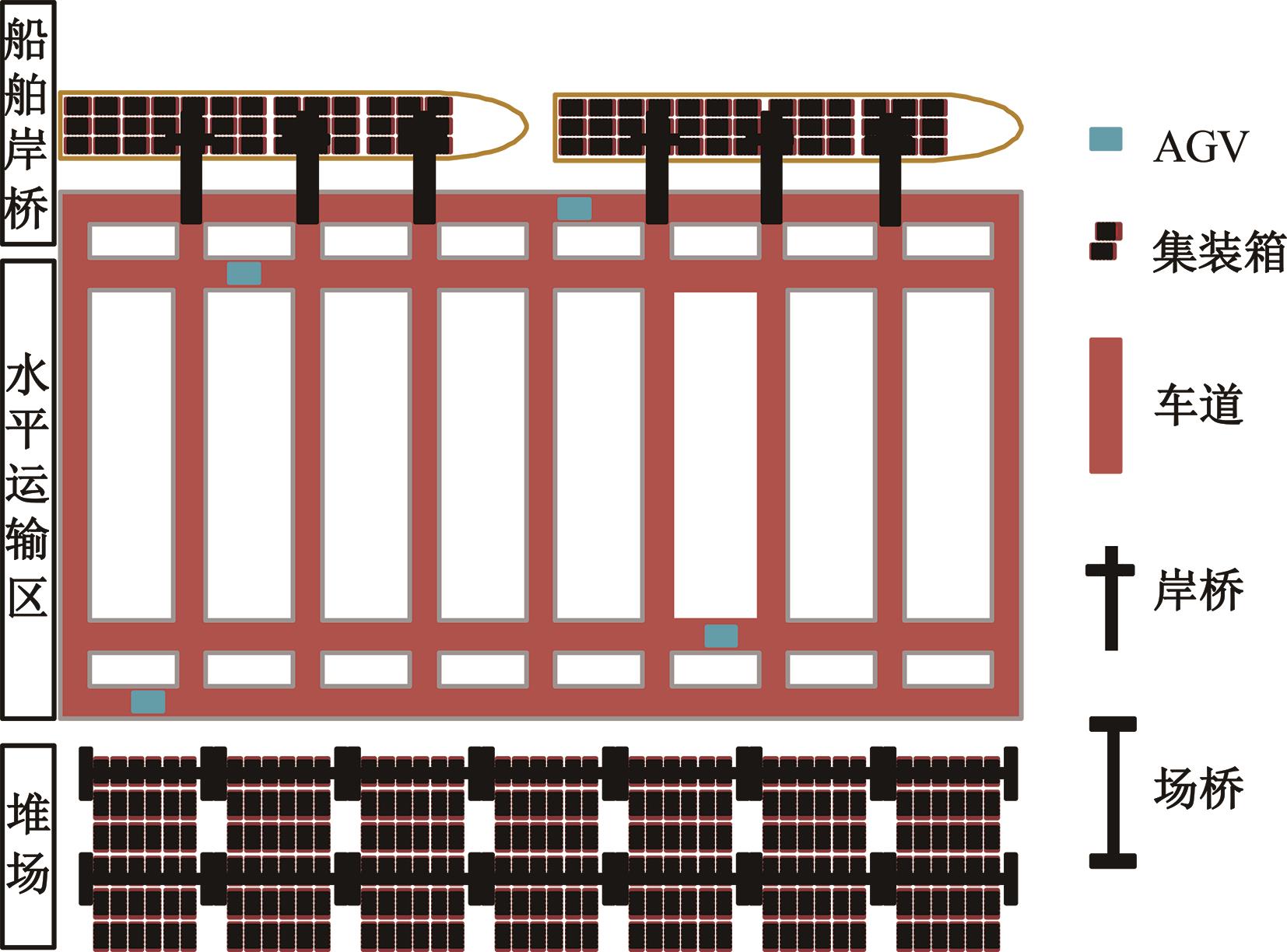
Automated terminal horizontal transportation scheduling and route planning under network resource allocation
Jin ZHU( ),Qi HUANG
),Qi HUANG
- Institute of Logistics Science and Engineering,Shanghai Maritime University,Shanghai 201306,China














| 1 | Zheng Y, Xiao Y, Seo Y. A tabu search algorithm for simultaneous machine/AGV scheduling problem[J]. International Journal of Production Research, 2014, 52(19): 5748-5763. |
| 2 | Mousavi M, Yap H J, Musa S N, et al. Multi-objective AGV scheduling in an FMS using a hybrid of genetic algorithm and particle swarm optimization[J]. PloS One, 2017, 12(3): No.e0169817. |
| 3 | Liu Y, Ji S, Su Z, et al. Multi-objective AGV scheduling in an automatic sorting system of an unmanned (intelligent) warehouse by using two adaptive genetic algorithms and a multi-adaptive genetic algorithm[J]. PloS One, 2019, 14(12): No.e0226161. |
| 4 | Chawla V K, Chanda A K, Angra S. Multi-load AGVs scheduling by application of modified memetic particle swarm optimization algorithm[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2018, 40(9): 1-13. |
| 5 | Zou W Q, Pan Q K, Meng T, et al. An effective discrete artificial bee colony algorithm for multi-AGVs dispatching problem in a matrix manufacturing workshop[J]. Expert Systems with Applications, 2020, 161: No.113675. |
| 6 | Li G, Zeng B, Liao W, et al. A new AGV scheduling algorithm based on harmony search for material transfer in a real-world manufacturing system[J]. Advances in Mechanical Engineering, 2018, 10(3): No.1687814018765560. |
| 7 | Boden P, Hahne H, Rank S, et al. Dispatching of multiple load automated guided vehicles based on adaptive large neighborhood search[C]∥Operations Research Proceedings 2019, Springer, Cham, 2020: 375-380. |
| 8 | 滕浩,庄子龙,黄子钊,等.自动化码头水平运输调度的改进人工蜂群算法[J].计算机集成制造系统,2023,29(7):2449-2460. |
| Teng Hao, Zhuang Zi-long, Huang Zi-zhao, et al. Improved artificial bee colony algorithm for automatic terminal horizontal transportation scheduling[J].Computer Integrated Manufacturing Systems,2023,29(7):2449-2460. | |
| 9 | 朱承元,晏楠欣,刘裕旭.基于仿真优化的临时航线动态规划[J].计算机仿真,2022,39(11):60-64,91. |
| Zhu Cheng-yuan, Yan Nan-xin, Liu Yu-xu. Dynamic programming of temporary routes based on simulation optimization[J]. Computer Simulation, 2022, 39(11): 60-64,91. | |
| 10 | Gan Y, Ji S, Zhao Q, et al. Scheduling problems of automated guided vehicles in automated container terminals using a genetic algorithm[C] ∥ IOP Conference Series: Materials Science and Engineering, IOP Publishing, 2020, 790(1): No.012069. |
| 11 | Luo J, Wu Y. Modelling of dual-cycle strategy for container storage and vehicle scheduling problems at automated container terminals[J]. Transportation Research Part E: Logistics and Transportation Review, 2015, 79: 49-64. |
| 12 | Jin J, Zhang X H. Multi agv scheduling problem in automated container terminal[J]. Journal of Marine Science and Technology, 2016, 24(1): 5. |
| 13 | Chen X, He S, Zhang Y, et al. Yard crane and AGV scheduling in automated container terminal: a multi-robot task allocation framework[J]. Transportation Research Part C: Emerging Technologies, 2020, 114: 241-271. |
| 14 | 杨勇生,冯有勇,梁承姬,等.自动化集装箱码头自动导引小车与轨道式龙门起重机的协同调度[J].上海海事大学学报,2017,38(2):1-6. |
| Yang Yong-sheng, Feng You-yong, Liang Cheng-ji, et al. Integrated scheduling of automated guided vehicles and rail-mounted gantry cranes at automated container terminals[J].Journal of Shanghai Maritime University,2017,38(2):1-6. | |
| 15 | Yang Z, Li C, Zhao Q. Dynamic time estimation based AGV dispatching algorithm in automated container terminal[C]∥2018 37th Chinese Control Conference (CCC),IEEE, 2018: 7868-7873. |
| 16 | Hu H, Chen X, Wang T, et al. A three-stage decomposition method for the joint vehicle dispatching and storage allocation problem in automated container terminals[J]. Computers & Industrial Engineering, 2019, 129: 90-101. |
| 17 | Luo J, Wu Y. Modelling of dual-cycle strategy for container storage and vehicle scheduling problems at automated container terminals[J]. Transportation Research Part E: Logistics and Transportation Review, 2015, 79: 49-64. |
| 18 | Saidi-Mehrabad M, Dehnavi-Arani S, Evazabadian F, et al. An ant colony algorithm (ACA) for solving the new integrated model of job shop scheduling and conflict-free routing of AGVs[J]. Computers & Industrial Engineering, 2015, 86: 2-13. |
| 19 | Xin J, Negenborn R R, Corman F, et al. Control of interacting machines in automated container terminals using a sequential planning approach for collision avoidance[J]. Transportation Research Part C: Emerging Technologies, 2015, 60: 377-396. |
| 20 | Zhong M, Yang Y, Sun S, et al. Priority-based speed control strategy for automated guided vehicle path planning in automated container terminals[J]. Transactions of the Institute of Measurement and Control, 2020, 42(16): 3079-3090. |
| 21 | Guo K, Zhu J, Shen L. An improved acceleration method based on multi-agent system for AGVs conflict-free path planning in automated terminals[J]. IEEE Access, 2020, 9: 3326-3338. |
| 22 | Hu Y, Dong L, Xu L. Multi-AGV dispatching and routing problem based on a three-stage decomposition method[J]. Mathematical Biosciences and Engineering, 2020, 17(5): 5150-5172. |
| 23 | Wang X, Shi H, Zhang C. Path planning for intelligent parking system based on improved ant colony optimization[J]. IEEE Access, 2020, 8: 65267-65273. |
| 24 | Zacharia P T, Xidias E K. AGV routing and motion planning in a flexible manufacturing system using a fuzzy-based genetic algorithm[J]. The International Journal of Advanced Manufacturing Technology, 2020, 109(7): 1801-1813. |
| 25 | Farooq B, Bao J, Ma Q. Flow-shop predictive modeling for multi-automated guided vehicles scheduling in smart spinning cyber–physical production systems[J]. Electronics, 2020, 9(5): 799 |
| 26 | 李静,朱小林.集装箱码头上多自动引导车的调度和路径规划[J].计算机集成制造系统,2022,28(5):1449-1461. |
| Li Jing, Zhu Xiao-lin. Scheduling and path planning of multiple automatic guided vehicles in container terminals[J].Computer Integrated Manufacturing Systems,2022,28(5):1449-1461. | |
| 27 | 王占中,蒋婷,张景海.基于模糊双边界网络模型的道路运输效率评价[J].吉林大学学报:工学版,2023,53(2):385-395. |
| Wang Zhan-zhong, Jiang Ting, Zhang Jing-hai.Evaluation of road transportation efficiency based on fuzzy double frontiers network model[J].Journal of Jilin University(Engineering and Technology Edition),2023,53(2):385-395. | |
| 28 | Zhong M, Yang Y, Dessouky Y, et al. Multi-AGV scheduling for conflict-free path planning in automated container terminals[J]. Computers & Industrial Engineering, 2020, 142: No.106371. |
| 29 | 郑长江,胡欢,杜牧青.考虑枢纽失效的多式联运快递网络结构设计[J].吉林大学学报:工学版,2023,53(8):2304-2311. |
| Zheng Chang-jiang, Hu Huan, Du Mu-qing. Design of multimodal express delivery network structure considering hub failure[J].Journal of Jilin University(Engineering and Technology Edition),2023,53(8):2304-2311. | |
| 30 | Miyamoto T, Inoue K. Local and random searches for dispatch and conflict-free routing problem of capacitated AGV systems[J]. Computers & Industrial Engineering, 2016, 91: 1-9. |
| [1] | Shuai-shuai SUN,Chun-xiao FENG,Liang ZHANG. Path planning for multimodal quadruped robots based on discrete sampling [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 1120-1128. |
| [2] | Hao ZHENG,Li-jun YU,Peng-peng ZHI,Zhong-lai WANG. Dynamic obstacle avoidance strategy for flapping⁃wing micro air vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2732-2740. |
| [3] | Zhen-yu WU,Xiao-fei LIU,Yi-pu WANG. Trajectory planning of unmanned system based on DKRRT*⁃APF algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 781-791. |
| [4] | Fan YANG,Zhi-qiang ZHAI,Yuan-yuan WANG,Zhong-xiang ZHU,Yue-feng DU,En-rong MAO. Design of assembly system for tractor transmission based on virtual reality [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 3038-3044. |
| [5] | Jia-xu ZHANG,Chen WANG,Jian ZHAO,Chun-yan BU. Path planning and tracking control for narrow parallel parking space [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1879-1886. |
| [6] | Jia-xu ZHANG,Xin-zhi WANG,Jian ZHAO,Zheng-tang SHI. Path planning and discrete sliding mode tracking control for high⁃speed lane changing collision avoidance of vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1081-1090. |
| [7] | Xiao-jian HAN,Wei-qiang ZHAO,Li-jun CHEN,Hong-yu ZHENG,Yang LIU,Chang-fu ZONG. Local path planning of bus based on RS-RRT algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1428-1440. |
| [8] | QIAN Li-jun, HU Wei-long, LIU Qing, WU Bing. Multiple segment method for automatic parking path planning and its key technology [J]. 吉林大学学报(工学版), 2016, 46(3): 785-791. |
| [9] | ZHOU Bing-hai, ZHOU Qi. Impending deadlock-free scheduling method for unified AMHS in semiconductor FABs [J]. 吉林大学学报(工学版), 2016, 46(2): 595-601. |
| [10] | KANG Bing, WANG Xi-hui, LIU Fu. Path planning of searching robot based on improved ant colony algorithm [J]. 吉林大学学报(工学版), 2014, 44(4): 1062-1068. |
| [11] | LIU Hou-de, LIANG Bin, XU Wen-fu, MU Qing-tao, YU Jiang-hua. Motion prediction and autonomous path planning for spinning target capturing [J]. 吉林大学学报(工学版), 2014, 44(3): 757-764. |
| [12] | LIU Gang, LIU Yu-bin, ZHAO Jie, ZHU Lei. Path planning for a new mine rescue robot base on visual tangent graphs [J]. 吉林大学学报(工学版), 2011, 41(4): 1107-1112. |
| [13] | ZHAO Yang, ZHAO Ji, ZHANG Lei, JI Li-Zhe. Robotic blade grinding based on reverse engineering [J]. 吉林大学学报(工学版), 2009, 39(05): 1176-1180. |
| [14] | YIN Li-ming1, JIA Yang2 . Algorithm evaluation for lunar rover path-planning [J]. 吉林大学学报(工学版), 2008, 38(04): 996-1000. |
| [15] | CHEN Mou, XIAO Jian, JIANG Chang-sheng . Three dimensional path planning of UAV with improved ant algorithm [J]. 吉林大学学报(工学版), 2008, 38(04): 991-995. |
|
||