Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (6): 2287-2294.doi: 10.13229/j.cnki.jdxbgxb20210470
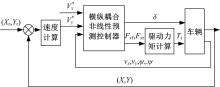
Lateral and longitudinal coupling real⁃time predictive controller for intelligent vehicle path tracking
Fang XU1,2( ),Jun-ming ZHANG2,Yun-feng HU2,Ting QU1,Yi QU2,Qi-fang LIU2()
),Jun-ming ZHANG2,Yun-feng HU2,Ting QU1,Yi QU2,Qi-fang LIU2()
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
CLC Number:
- TP273






| 1 | 陈虹,郭露露,宫洵, 等. 智能时代的汽车控制[J]. 自动化学报, 2020, 46(7):1313-1332. |
| Chen Hong, Guo Lu-lu, Gong Xun, et al. Automotive control in intelligent era[J]. Acta Automatica Sinica, 2020, 46(7):1313-1332. | |
| 2 | 张栩源,李军,化祖旭. 自动驾驶汽车路径跟踪控制[J]. 汽车工程师, 2021(1): 14-17. |
| Zhang Xu-yuan, Li Jun, Hua Zu-xu. Path tracking control for autonomous vehicle[J]. Automotive Engineer, 2021(1): 14-17. | |
| 3 | 陈威,廖文浩,刘明春. 基于MPC 的自动驾驶车辆横向路径跟踪控制[J]. 南昌大学学报:工科版,2020,42(3):279-288. |
| Chen Wei, Liao Wen-hao, Liu Ming-chun. Lateral path tracking control of self-driving vehicle based on MPC[J]. Journal of Nanchang University (Engineering&Technology Edition), 2020, 42(3): 279-288. | |
| 4 | 吴施鹏,刘冉冉,颜海彬,等. 基于模型预测的无人车路径跟踪优化控制[J]. 重庆理工大学学报:自然科学, 2020, 34(12): 36-44. |
| Wu Shi-peng, Liu Ran-ran, Yan Hai-bin, et al. Optimal control of unmanned vehicle path tracking based on model prediction[J]. Journal of Chongqing University of Technology(Natural Science), 2020, 34(12): 36-44. | |
| 5 | 吴飞龙,郭世永. 基于非线性模型预测控制的智能车路径跟踪算法[J]. 汽车技术, 2020(5):1-7. |
| Wu Fei-long, Guo Shi-yong. Intelligent vehicle path tracking algorithm based on nonlinear model predictive control[J]. Automobile Technology, 2020(5):1-7. | |
| 6 | Gutjahr B, Groll L, Werling M. Lateral vehicle trajectory optimization using constrained linear time-varying MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1586-1595. |
| 7 | Ji J, Khajepour A, Melek W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2):952-964. |
| 8 | Kai Cao, Han Shi-xia, Gao Song, et al. Sliding mode algorithm based on linearization feedback for vehicle's speed control[C]∥Proceedings of the 36th Chinese Control Conference, Dalian, China, 2017:9355-9359. |
| 9 | Xiong Lu, Fu Zhi-qiang, Bai Man-fei, et al. A vehicle speed adaptive control method considering acceleration demand[J]. Journal of Xi'an Jiao tong University, 2019, 53(1):62-69. |
| 10 | Chen Sun-ping, Xiong Guang-ming, Chen Hui-yan, et al. MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel[J]. Journal of Central South University, 2020, 27(12):3702-3720. |
| 11 | 史鸿枫,刘明春,黄菊花. 智能电动车辆横纵向协同运动控制[J]. 南昌大学学报:工科版,2021,43(1):62-72. |
| Shi Hong-feng, Liu Ming-chun, Huang Ju-hua. Lateral and longitudinal motion cooperative control of intelligent electric vehicle[J]. Journal of Nanchang University(Engineering&Technology Edition),2021,43(1):62-72. | |
| 12 | 吴昊,王思山,周海鹰,等. 基于模型预测控制的智能车横纵向控制器设计[J]. 湖北汽车工业学院学报, 2021, 35(1):11-16, 20. |
| Wu Hao, Wang Si-shan, Zhou Hai-ying, et al. Design of lateral and longitudinal controller of intelligent vehicle based on model predictive control[J]. Journal of Hubei University of Automotive Technology, 2021, 35(1): 11-16, 20. | |
| 13 | Xie Hui, Liu Shuang-shuang. Lateral and longitudinal motion control of unmanned vehicles using model predictive control[J].Journal of Automotive Safety and Energy, 2019,10(3):326-333. |
| 14 | Yao Qiang-qiang, Tian Yian, Wang Qun, et al. Control strategies on path tracking for autonomous vehicle: state of the art and future challenges[J]. IEEE Access, 2020(8): 161211-161222. |
| 15 | 付翔,杨凤举,黄斌,等. 主动后轮转向四轮独立驱动车辆的协调控制[J]. 江苏大学学报:自然科学版,2021,42(5):497-505. |
| Fu Xiang,Yang Feng-ju,Huang Bin,et al. Coordinated control of active rear wheel steering and four wheel independent driving vehicle[J]. Journal of Jiangsu University(Natural Science Edition),2021,42(5):497-505. | |
| 16 | 徐梅,陈淮莉. 交通拥堵情况下的多温共配车辆路径优化[J]. 江苏大学学报:自然科学版,2019,40(2):152-158. |
| Xu Mei,Chen Huai-li. Optimization of multi-temperature co-distribution vehicle path based on congestion situation[J]. Journal of Jiangsu University(Natural Science Edition),2019,40(2):152-158. | |
| 17 | 张金成,王陶,王良模,等. 纯电动汽车坡道行驶驱动转矩优化控制策略[J]. 江苏大学学报:自然科学版, 2021, 42(5):506-512. |
| Zhang Jin-cheng, Wang Tao, Wang Liang-mo, et al. Optimization control strategy of driving torque for slope-crossing of pure electric vehicles[J]. Journal of Jiangsu University(Natural Science Edition, 2021, 42(5): 506-512. | |
| 18 | 丛岩峰. 高速公路环境中自主驾驶车辆运动规划与控制[D]. 长春:吉林大学通信工程学院,2011. |
| Cong Yan-feng. Motion planning and control of autonomous vehicles in highway environment[D]. Changchun: College of Communication Engineering, Jilin University, 2011. | |
| 19 | Wang Yu-lei, Ding Hai-tao, Yuan Jing-xin, et al. Output-feedback triple-step coordinated control for path following of autonomous ground vehicles[J]. Mechanical Systems and Signal Processing,2019,116:146-159. |
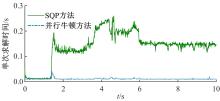
| 20 | Deng H, Ohtsuka T. A parallel Newton-type method for nonlinear model predictive control[J]. Automatica, 2019,109:No.108560. |
| 21 | Nocedal J, Wright S J. Numerical Optimization[M]. New York, America:Springer, 2006. |
| [1] | Bin XIAN,Shi-jing ZHANG,Xiao-wei HAN,Jia-ming CAI,Ling WANG. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2259-2267. |
| [2] | Guang-xin HAN,Ju-le ZHAO,Yun-feng HU. Moving horizon linear quadratic regulator control for ball and plate system with input constraints [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1982-1989. |
| [3] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [4] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [5] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
| [6] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [7] | Xing-tian QU,Xue-xu WANG,Hui-chao SUN,Kun ZHANG,Long-wei YAN,Hong-yi WANG. Fuzzy self⁃adaptive PID control for fused deposition modeling 3D printer heating system [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 77-83. |
| [8] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
| [9] | Shu⁃you YU,Lei TAN,Wu⁃yang WANG,Hong CHEN. Control of active four wheel steering vehicle based ontriple⁃step method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 934-942. |
| [10] | Hai⁃ying WEN,Xiang REN,Wei⁃liang XU,Ming CONG,Wen⁃long QIN,Shu⁃hai HU. Bionic design and experimental test of temporomandibular joint for masticatory robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 943-952. |
| [11] | GU Wan-li,WANG Ping,HU Yun-feng,CAI Shuo,CHEN Hong. Nonlinear controller design of wheeled mobile robot with H∞ performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1811-1819. |
| [12] | LI Zhan-dong,TAO Jian-guo,LUO Yang,SUN Hao,DING Liang,DENG Zong-quan. Design of thrust attachment underwater robot system in nuclear power station pool [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1820-1826. |
| [13] | WANG De-jun, WEI Wei-li, BAO Ya-xin. Actuator fault diagnosis of ESC system considering crosswind interference [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1548-1555. |
| [14] | YAN Dong-mei, ZHONG Hui, REN Li-li, WANG Ruo-lin, LI Hong-mei. Stability analysis of linear systems with interval time-varying delay [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1556-1562. |
| [15] | TIAN Yan-tao, ZHANG Yu, WANG Xiao-yu, CHEN Hua. Estimation of side-slip angle of electric vehicle based on square-root unscented Kalman filter algorithm [J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
|
||