Journal of Jilin University(Engineering and Technology Edition) ›› 2018, Vol. 48 ›› Issue (6): 1820-1826.doi: 10.13229/j.cnki.jdxbgxb20170813
Previous Articles Next Articles
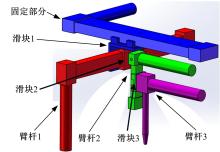
Design of thrust attachment underwater robot system in nuclear power station pool
LI Zhan-dong1( ),TAO Jian-guo1(),LUO Yang1,SUN Hao2,DING Liang1,DENG Zong-quan1
),TAO Jian-guo1(),LUO Yang1,SUN Hao2,DING Liang1,DENG Zong-quan1
- 1. School of Mechanical and Electrical Engineering, Harbin Institute of Technology, Harbin 150080, China
2. School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350001, China
CLC Number:
- TP242.6






| [1] |
Ongena R, Ogawa Y . Nuclear power:status report and future prospects[J]. Energy Policy, 2016,96:770-778.
doi: 10.1016/j.enpol.2016.05.037 |
| [2] |
Avila J P J, Donha D C, Adamowski J C . Experimental and model identification open-frame underwear vehicle[J]. Ocean Engineering, 2013,60(2):81-94.
doi: 10.1016/j.oceaneng.2012.10.007 |
| [3] | Aras M, Shairieel M, Ab A F, et al. A low cost 4 DOF remotely operated underwater vehicle integrated with IMU and pressure sensor [C]//4th International Conference on Underwater System Technology: Theory and Application, Shah Alam, 2012: 18-23. |
| [4] | Mu L J, Sardinha C, Chen C Y, et al. Remotely operated vehicle system implementation in open-water [C]//Proceedings of the 2nd International Conference on Intelligent Technologies and Engineering Systems, New York, 2014: 553-560. |
| [5] | Yang R, Clement B, Mansour A, et al. Modeling of a complex-shape underwater vehicle [C]//2014 IEEE International Conference on Autonomous Robot Systems and Competitions, Espinho, 2014: 36-41. |
| [6] |
Heale T, Larkum T . ARM and rovsim: extending our reach[J]. Industrial Robot: an International Journal, 1999,26(3):202-208.
doi: 10.1108/01439919910266866 |
| [7] | 俞强 . 水下磁吸附式轮履焊接水下机器人原理样机研究[D]. 南昌:南昌大学机电工程学院, 2007. |
| Yu Qiang . A study on magnetic attracting underwater wheel-tracked welding robot systems prototype [D]. Nanchang: School of Mechanical and Electronic Engineering, Nanchang University, 2007. | |
| [8] | 衣瑞文, 张宝军, 吴超 , 等. 堆内构件检测ROV设计与实现[J]. 海洋工程, 2011,29(4):125-129. |
| Yi Rui-wen, Zhang Bao-jun, Wu Chao , et al. Design and implementation of ROV for detecting components in the reactor[J]. Ocean Engineering, 2011,29(4):125-129. | |
| [9] |
Wang D, Gauld I C, Yoder G L , et al. Study of Fukushima Daiichi nuclear power station unit 4 spent-fuel pool[J]. Nuclear Technology, 2012,180(2):205-215.
doi: 10.13182/NT12-A14634 |
| [10] | 惠嘉 . 温度对聚四氟乙烯材料特性的影响研究[J]. 火工品, 2006(1):46-48. |
| Hui Jia . Effect of temperature on the properties of Teflon[J]. Initiators & Pyrotechnics, 2006(1):46-48. | |
| [11] |
Peng J F, Qiu J Y, Ni J F , et al. Radiation synjournal and characteristics of PTFE-g-PSSA ion exchange membrane applied in vanadium redox battery[J]. Nuclear Science and Techniques, 2007,18(1):50-54.
doi: 10.1016/S1001-8042(07)60018-9 |
| [12] |
韩仲武, 栾伟玲, 韩延龙 , 等. 钨、镍组合及钨镍合金的辐射屏蔽性能模拟[J]. 核技术, 2015,38(1):23-28.
doi: 10.11889/j.0253-3219.2015.hjs.38.010204 |
|
Han Zhong-wu, Luan Wei-ling, Han Yan-long , et al. Simulation of radiation shielding properties of composition of tungsten, nickel and tungsten nickel alloy[J]. Nuclear Technology, 2015,38(1):23-28.
doi: 10.11889/j.0253-3219.2015.hjs.38.010204 |
|
| [13] | Fossen T I . Guidance and Control of Ocean Vehicles[M]. New York: Wiley New York, 1994. |
| [1] | Shu⁃you YU,Lei TAN,Wu⁃yang WANG,Hong CHEN. Control of active four wheel steering vehicle based ontriple⁃step method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 934-942. |
| [2] | Hai⁃ying WEN,Xiang REN,Wei⁃liang XU,Ming CONG,Wen⁃long QIN,Shu⁃hai HU. Bionic design and experimental test of temporomandibular joint for masticatory robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 943-952. |
| [3] | GU Wan-li,WANG Ping,HU Yun-feng,CAI Shuo,CHEN Hong. Nonlinear controller design of wheeled mobile robot with H∞ performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1811-1819. |
| [4] | WANG De-jun, WEI Wei-li, BAO Ya-xin. Actuator fault diagnosis of ESC system considering crosswind interference [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1548-1555. |
| [5] | YAN Dong-mei, ZHONG Hui, REN Li-li, WANG Ruo-lin, LI Hong-mei. Stability analysis of linear systems with interval time-varying delay [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1556-1562. |
| [6] | LIU Xiang-yong, LI Wan-li. Electro-hydraulic proportional control model of accumulator [J]. 吉林大学学报(工学版), 2018, 48(4): 1072-1084. |
| [7] | TIAN Yan-tao, ZHANG Yu, WANG Xiao-yu, CHEN Hua. Estimation of side-slip angle of electric vehicle based on square-root unscented Kalman filter algorithm [J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [8] | ZHANG Shi-tao, ZHANG Bao, LI Xian-tao, WANG Zheng-xi, TIAN Da-peng. Enhancing performance of FSM based on zero phase error tracking control [J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [9] | WANG Lin, WANG Hong-guang, SONG Yi-feng, PAN Xin-an, ZHANG Hong-zhi. Behavior planning of a suspension insulator cleaning robot for power transmission lines [J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [10] | HU Yun-feng, WANG Chang-yong, YU Shu-you, SUN Peng-yuan, CHEN Hong. Structure parameters optimization of common rail system for gasoline direct injection engine [J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [11] | ZHU Feng, ZHANG Bao, LI Xian-tao, WANG Zheng-xi, ZHANG Shi-tao. Gyro signal processing based on strong tracking Kalman filter [J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
| [12] | JIN Chao-qiong, ZHANG Bao, LI Xian-tao, SHEN Shuai, ZHU Feng. Friction compensation strategy of photoelectric stabilized platform based on disturbance observer [J]. 吉林大学学报(工学版), 2017, 47(6): 1876-1885. |
| [13] | FENG Jian-xin. Recursive robust filtering for uncertain systems with delayed measurements [J]. 吉林大学学报(工学版), 2017, 47(5): 1561-1567. |
| [14] | XU Jin-kai, WANG Yu-tian, ZHANG Shi-zhong. Dynamic characteristics of a heavy duty parallel mechanism with actuation redundancy [J]. 吉林大学学报(工学版), 2017, 47(4): 1138-1143. |
| [15] | HU Yun-feng, GU Wan-li, LIANG Yu, DU Le, YU Shu-you, CHEN Hong. Start-stop control of hybrid vehicle based on nonlinear method [J]. 吉林大学学报(工学版), 2017, 47(4): 1207-1216. |
|