Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (12): 3358-3366.doi: 10.13229/j.cnki.jdxbgxb.20220050
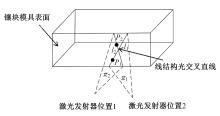
Flatness error measurement method based on line structured light vision
Si-yuan LIU1( ),Yue-qian HOU2,Ying KOU1(),Zhen REN2,Zheng-yi HU3,4,Xue-wei ZHAO2,Yu-peng GE1
),Yue-qian HOU2,Ying KOU1(),Zhen REN2,Zheng-yi HU3,4,Xue-wei ZHAO2,Yu-peng GE1
- 1.School of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
2.School of Mechanical Engineering,Changchun University,Changchun 130022,China
3.School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510641,China
4.Production and Education Integration Development Center,Changchun Automobile Industry College,Changchun 130010,China
CLC Number:
- TH164




| 1 | 薛岩, 于明. 机械加工精度测量与质量控制[M]. 3版. 北京: 化学工业出版社, 2016. |
| 2 | 李影. 光电水平仪设计与平面度误差测量方法的研究[D]. 大连:大连理工大学机械工程学院, 2019. |
| Li Ying. The design of photoelectric level gauge and the study of flatness error measurement method[D]. Dalian: School of Mechanical Engineering, Dalian University of Technology, 2019. | |
| 3 | 谯梁, 冉庆, 龚柯安. 激光平面移相干涉仪示值误差测量结果不确定度评定[J]. 工业计量, 2020, 30(): 66-67. |
| Qiao Liang, Ran Qing, Gong Ke-an. Evaluation of uncertainty in measurement results of indication error of laser planar phase-shifting interferometer[J]. Industrial Metrology, 2020, 30(Sup.1): 66-67. | |
| 4 | Wang Han-bin. Uncertainty evaluation for the CMM flatness measurement[J]. Metrology & Measurement Technique, 2019, 46(3): 98-99. |
| 5 | 单忠德, 张飞, 聂军刚, 等. 非接触式缸盖平面度误差检测方法与测量系统研究[J]. 机械工程学报, 2016, 52(20): 1-7. |
| Shan Zhong-de, Zhang Fei, Nie Jun-gang, et al. Study on the detection method and measurement system of head flatness error on non-contact detection[J]. Journal of Mechanical Engineering, 2016, 52(20): 1-7. | |
| 6 | Tan Qing-chang, Kou Ying, Miao Jian-wei, et al. A model of diameter measurement based on the machine vision[J]. Symmetry, 2021, 13(2): No. 187. |
| 7 | Liu Rui-yuan, Wang Ze-yuan, Liu Xiao-min, et al. Research on Visual Inspection of Appearance Defects of Automotive Precision Parts, 2020, 41(3): 192-196. |
| 8 | Mikko Makela, Marja Rissanen, Herbert Sixta. Machine vision estimates the polyester content in recyclable waste textiles[J]. Resources Conservation and Recycling, 2020, 161: No. 105007. |
| 9 | 张广军. 机器视觉[M]. 北京:科学出版社, 2005. |
| 10 | Liu Bin, Wang Peng, Zeng Yong, et al. Measuring method for micro-diameter based on structured-light vision technology[J]. Chinese Optics Letters, 2010, 8(7): 666-669. |
| 11 | Liu Si-yuan, Tan Qing-chang, Zhang Ya-chao. Shaft diameter measurement of using the structured light vision[J]. Sensors, 2015, 15(8): 19750-19767. |
| 12 | Zhong Chu-qian, Gao Zhan, Wang Xu, et al. Structured light three-dimensional measurement based on machine learning[J]. Sensors, 2019, 19(14): No. 3229. |
| 13 | 何文彦, 曹学东, 匡龙. 结构光检测大型止推环止推面平面度探究[J]. 光电工程, 2016, 43(11): 7-12. |
| He Wen-yan, Cao Xue-dong, Kuang Long, et al. A preliminary based on structured-light for flatness measurement of large annular planes[J]. Opto-Electronic Engineering, 2016, 43(11): 7-12. | |
| 14 | Miao Hui-si, Xiao Chang-yan, Li Yu-cheng, et al. Machine vision system for key-cap flatness measurement of computer keyboards[J]. Optical Engineering, 2020, 59(3): No.1. |
| 15 | 谭文, 方淼, 段峰, 等. 基于机器视觉的3D激光平面度测量系统的研究与应用[J]. 仪器仪表学报, 2020, 41(1): 241-249. |
| Tan Wen, Fang Miao, Duan Feng, et al. Research and application of 3D laser flatness measurement system based on machine vision[J]. Chinese Journal of Scientific Instrument, 2020, 41(1): 241-249. | |
| 16 | Chen Sheng-feng, Su Chong-yang, Liu Jian, et al. Flatness measurement of platform screen system welding assembly using stereo vision and grid pattern projector[J]. IEEE Sensors Journal, 2022, 22(1): 948-958. |
| 17 | . 产品几何量技术规范(GPS)平面度误差检测 [S]. |
| 18 | Zhang Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| 19 | Steger C. An unbiased detector of curvilinear structures[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998, 20(2): 113-125. |
| [1] | Hao-jing BAO,Si-yuan LIU,Zhen REN,Yun-hui ZHANG,Zheng-yi HU,Yu-peng GE. Sprocket size measurement method based on machine vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 2795-2806. |
| [2] | Jing-bin LI,Yu-kun YANG,Bao-qin WEN,Za KAN,Wen SUN,Shuo YANG. Method of extraction of navigation path of post-autumn residual film recovery based on stubble detection [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1528-1539. |
| [3] | LIU En-ze,WU Wen-fu. Agricultural surface multiple feature decision fusion disease judgment algorithm based on machine vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1873-1878. |
| [4] | LIN Jin-hua, WANG Yan-jie, WANG Lu, YAO Yu. Real-time surface reconstruction based global camera pose optimization [J]. 吉林大学学报(工学版), 2018, 48(3): 909-918. |
| [5] | ZHANG Fei, SHAN Zhong-de, REN Yong-xin, NIE Jun-gang, LIU Feng. Calibration of line array camera for head defect detection system on cylinder cover [J]. 吉林大学学报(工学版), 2017, 47(2): 540-545. |
| [6] | ZHOU Xiao-dong, ZHANG Ya-chao, TAN Qing-chang, ZHANG Wei-jun. New method of cylindricity measurement based on structured light vision technology [J]. 吉林大学学报(工学版), 2017, 47(2): 524-529. |
| [7] | ZHANG Bo, WANG Wen-jun, WEE Minkooc, CHENG Bo. Detection handheld phone use by driver based on machine vision [J]. 吉林大学学报(工学版), 2015, 45(5): 1688-1695. |
| [8] | LIU Chang-ying, CAI Wen-jing, WANG Tian-hao, LI Ji-zhi, JIA Yan-mei, SONG Yu-he. Vision inspection technology of fracture splitting notch of auto connecting rod [J]. 吉林大学学报(工学版), 2014, 44(4): 1076-1080. |
| [9] | WAN Chuan, TIAN Yan-tao, LIU Shuai-shi, CHEN Hong-wei. Face tracking and facial expression recognition system based on active machine vision [J]. 吉林大学学报(工学版), 2013, 43(02): 459-465. |
| [10] | CONG Yan-feng, AN Xiang-jing, CHEN Hong, YU Zai-tao. Path following control of car-like robot based on rolling windows [J]. 吉林大学学报(工学版), 2012, 42(01): 182-187. |
| [11] | ZHAO Ding-Xuan, CUI Yu-Xin, GONG Jie, NI Tao, HOU Jing-Wei, ZHAO Ying, WANG Chao-Fei. Method of tracking and measuring moving object based on machine vision [J]. 吉林大学学报(工学版), 2010, 40(增刊): 257-0261. |
| [12] | LIU Chun-bao,MA Wen-xing,ZHU Xi-lin,DENG Hong-chao. Design method of flat hydrodynamic torque converter for passenger car based on elliptic torus [J]. 吉林大学学报(工学版), 2010, 40(04): 1039-1043. |
| [13] | MENG Xiang-Yan, SUN Yong-Hai, WANG Xiao-Dan, LI Zhi, HU Tie-Jun, HE Bing. Methods of extraction and analysis of grading features of ribeye section of beef carcass [J]. 吉林大学学报(工学版), 2010, 40(02): 485-0490. |
| [14] | YIN Yong-guang,DING Yun. Rapid method for enumeration of Escherichia coli in food based on computer vision [J]. 吉林大学学报(工学版), 2009, 39(增刊2): 344-0348. |
| [15] | WANG Hong-Rui, TIAN Yan-Chao, GU Qing. Adaptive tuning methods for digital camera parameters under variou illuminations [J]. 吉林大学学报(工学版), 2009, 39(05): 1262-1267. |
|
||