Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (5): 1435-1442.doi: 10.13229/j.cnki.jdxbgxb.20220782
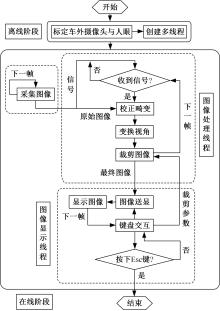
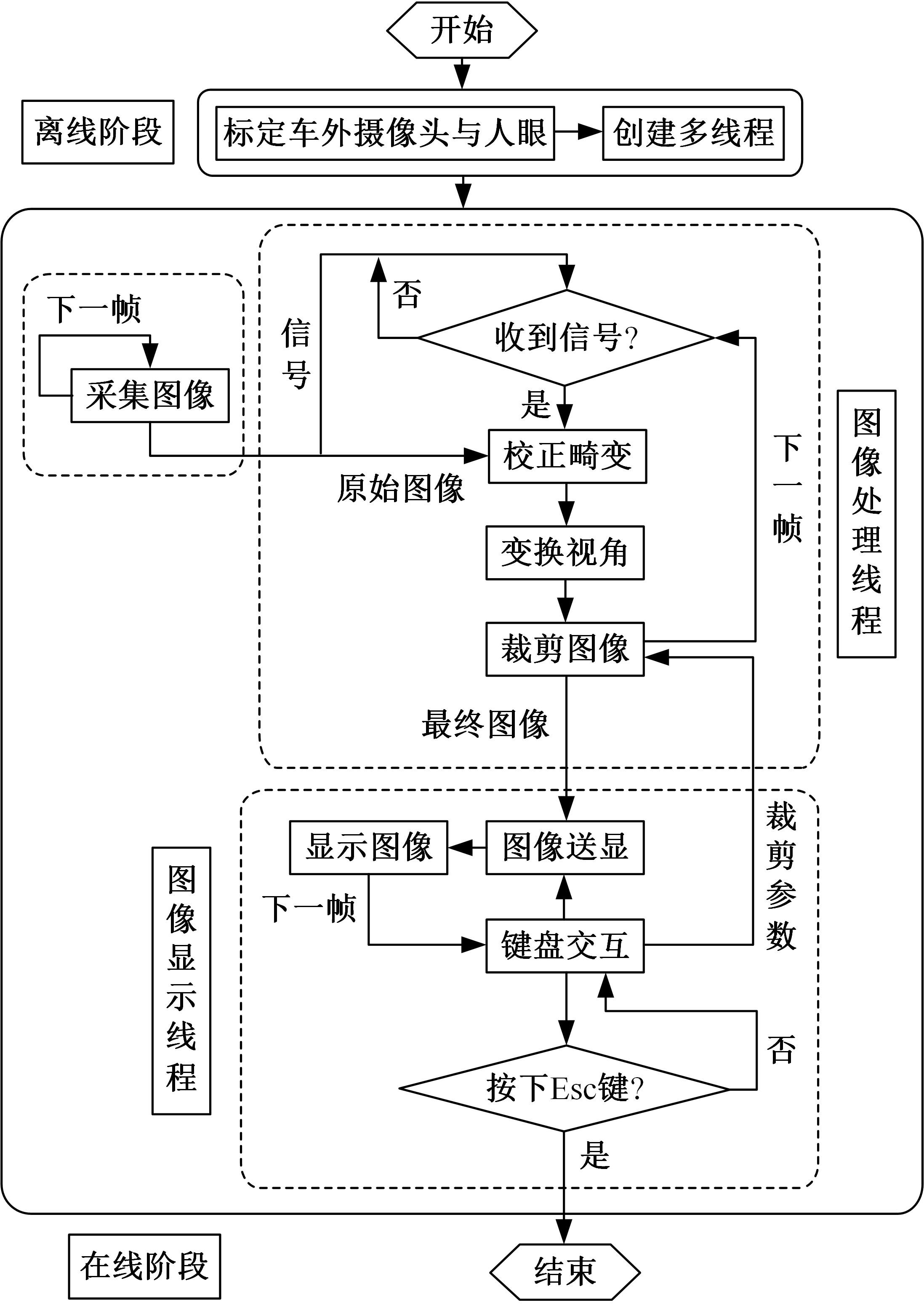
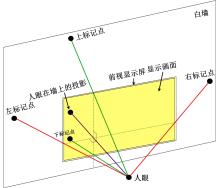
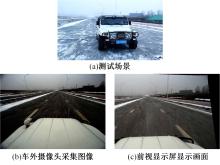
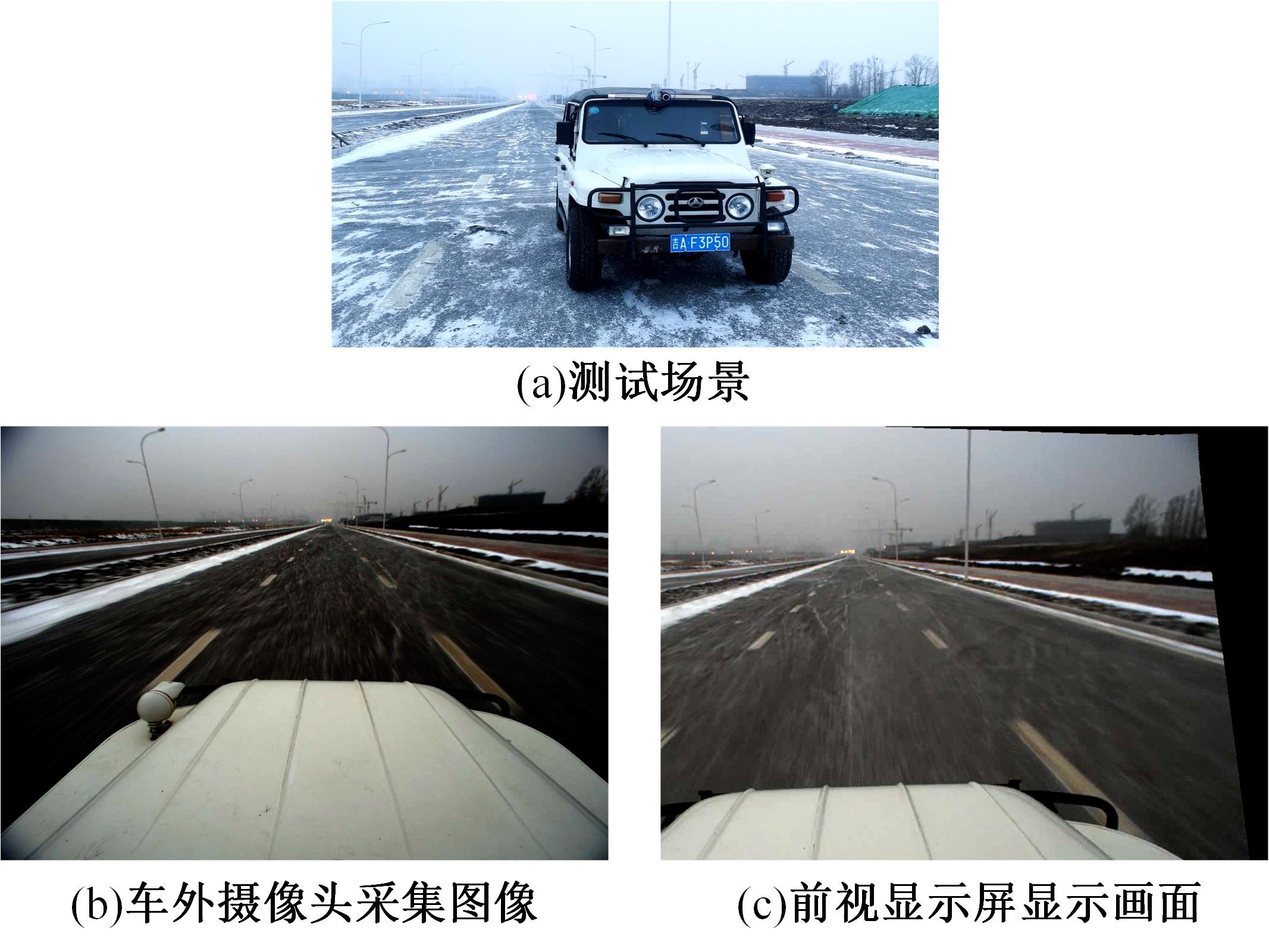
Forward-looking visual field reproduction for vehicle screen-displayed closed cockpit using monocular vision
Hai-tao WANG1( ),Hui-zhuo LIU1(),Xue-yong ZHANG1,Jian WEI2,Xiao-yuan GUO2,Jun-zhe XIAO2
),Hui-zhuo LIU1(),Xue-yong ZHANG1,Jian WEI2,Xiao-yuan GUO2,Jun-zhe XIAO2
- 1.Shenyang Aircraft Design and Research Institute,Aviation Industry Corporation of China Limited,Shenyang 110035,China
2.College of Communication Engineering,Jilin University,Changchun 130012,China
CLC Number:
- TP391.7




| 1 | 谭兆一,陈白帆,苏苇,等. 基于第一视角的车辆盲区视野重现[J]. 软件导刊, 2020, 19(9): 196-200. |
| Tan Zhao-yi, Chen Bai-fan, Su Wei, et al. Vehicle blind spot reproduction system in first-person view[J]. Software Guide, 2020, 19(9): 196-200. | |
| 2 | 蒙杨超,杨汉飞. 流媒体全视屏后视镜的设计[J]. 时代汽车, 2020 (12): 78-80. |
| Meng Yang-chao, Yang Han-fei. Design of streaming media full screen rearview mirror[J]. Auto Time, 2020 (12): 78-80. | |
| 3 | 魏小冈. 基于电子透明理念的A柱盲区消除系统[J]. 时代汽车, 2022 (8): 138-139. |
| Wei Xiao-gang. A-pillar blind area elimination system based on electronic transparency concept[J]. Auto Time, 2022(8): 138-139. | |
| 4 | Zhang Z. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. |
| 5 | 谭华春,夏红卫,李琴,等. 车载摄像机的立体标定方法[J]. 吉林大学学报:工学版, 2013, 43(1): 352-356. |
| Tan Hua-chun, Xia Hong-wei, Li Qin, et al. Three-dimensional calibration for on-board camera[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(1): 352-356. | |
| 6 | 迟德霞,王洋,宁立群,等. 张正友法的摄像机标定试验[J]. 中国农机化学报, 2015, 36(2): 287-289, 337. |
| Chi De-xia, Wang Yang, Ning Li-qun, et al. Experimental research of camera calibration based on Zhang's method[J]. Journal of Chinese Agricultural Mechanization, 2015, 36(2): 287-289, 337. | |
| 7 | Brown M, Lowe D. Automatic panoramic image stitching using invariant features[J]. International Journal of Computer Vision, 2007, 74(1): 59-73. |
| 8 | 徐明,刁燕,罗华,等. 基于改进的 SURF 算子和透视变换模型的图像配准[J]. 计算机与数字工程, 2020, 48(3): 671-677. |
| Xu Ming, Diao Yan, Luo Hua, et al. Image registration based on improved SURF operator and perspective transform model[J]. Computer & Digital Engineering, 2020, 48(3): 671-677. | |
| 9 | 兰凤崇,李继文,陈吉清. 面向动态场景复合深度学习与并行计算的DG-SLAM算法[J]. 吉林大学学报:工学版, 2021, 51(4): 1437-1446. |
| Lan Feng-chong, Li Ji-wen, Chen Ji-qing. DG-SLAM algorithm for dynamic scene compound deep learning and parallel computing[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(4): 1437-1446. | |
| 10 | Chen S, Pu Z, Fan X, et al. Fixing defect of photometric loss for self-supervised monocular depth estimation[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 32(3): 1328-1338. |
| 11 | 高振海,李扬,张慧,等. 不同车速下驾驶员变换车道前视行为特征规律[J]. 吉林大学学报:工学版, 2016, 46(5): 1385-1390. |
| Gao Zhen-hai, Li Yang, Zhang Hui, et al. Driver's forward-looking behavior analysis during lane change under different speed[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1385-1390. | |
| 12 | Kwon Y, Park M. Predicting future frames using retrospective cycle GAN[C]∥2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, US, 2019. |
| [1] | Chun-yang WANG,Wen-qian QIU,Xue-lian LIU,Bo XIAO,Chun-hao SHI. Accurate segmentation method of ground point cloud based on plane fitting [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 933-940. |
| [2] | Li-bin ZHANG,Shi-yuan FENG,Hong-ying SHAN,Guan-ran WANG. Braking timing detection of tractor⁃trailer⁃train based on tire slip rate and monocular vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3415-3423. |
| [3] | Xue-mei LI,Chun-yang WANG,Xue-lian LIU,Chun-hao SHI,Guo-rui LI. Point cloud registration method based on supervoxel bidirectional nearest neighbor distance ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1918-1925. |
| [4] | Xue-mei LI,Chun-yang WANG,Xue-lian LIU,Da XIE. Time delay estimation of linear frequency-modulated continuous-wave lidar signals via SESTH [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 950-958. |
| [5] | Le-ping LIN,Zeng-tong LU,Ning OUYANG. Face reconstruction and recognition in non⁃cooperative scenes [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2941-2946. |
| [6] | Hui-jing DOU,Gang DING,Jia GAO,Xiao LIANG. Wideband signal direction of arrival estimation based on compressed sensing theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2237-2245. |
| [7] | Xin-yu JIN,Mu-han XIE, SUN-Bin. Grain information compressed sensing based on semi-tensor product approach [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 379-385. |
| [8] | Li⁃min GUO,Xin CHEN,Tao CHEN. Radar signal modulation type recognition based on AlexNet model [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 1000-1008. |
| [9] | LI Lin-hui, LUN Zhi-mei, LIAN Jing, YUAN Lu-shan, ZHOU Ya-fu, MA Xiao-yi. Convolution neural network-based vehicle detection method [J]. 吉林大学学报(工学版), 2017, 47(2): 384-391. |
| [10] |
Li Mao-hai,Hong Bing-rong,Luo Rong-hua .
Improved RaoBlackwellized particle filters for mobile robot simultaneous localization and mapping [J]. 吉林大学学报(工学版), 2007, 37(02): 401-0406. |
|
||