Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (2): 614-622.doi: 10.13229/j.cnki.jdxbgxb.20230472
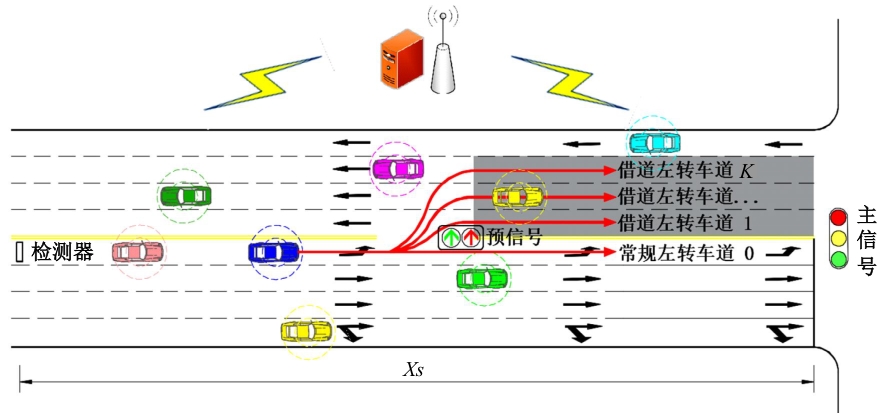
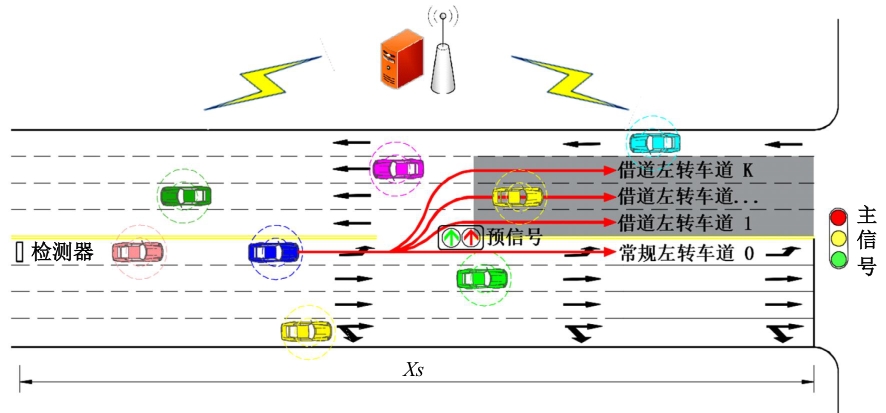
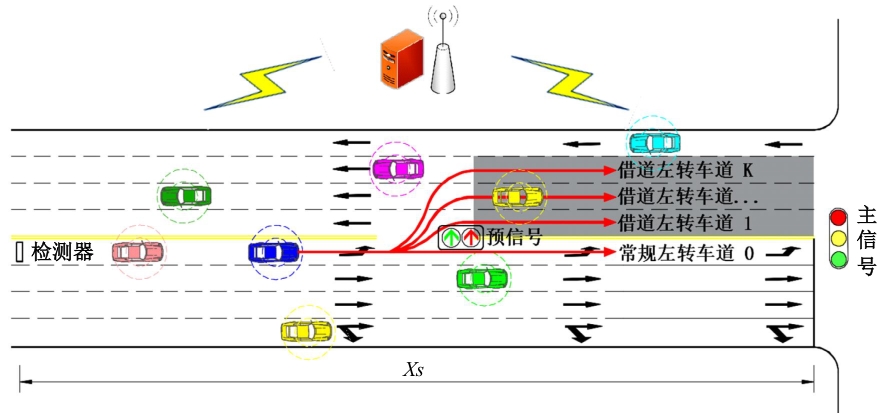
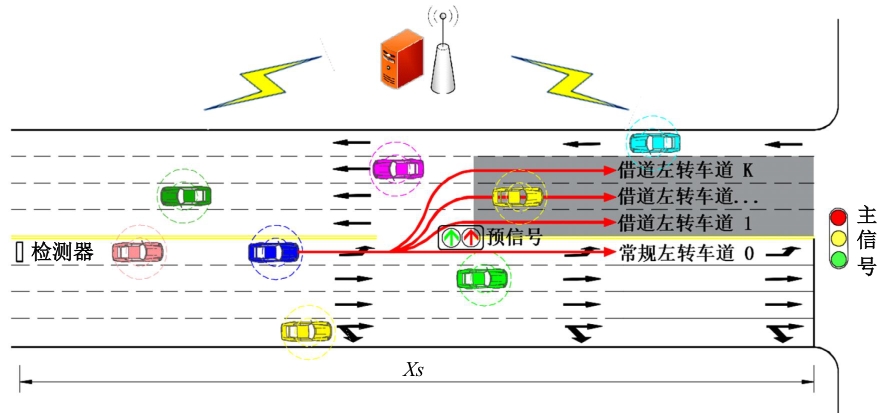
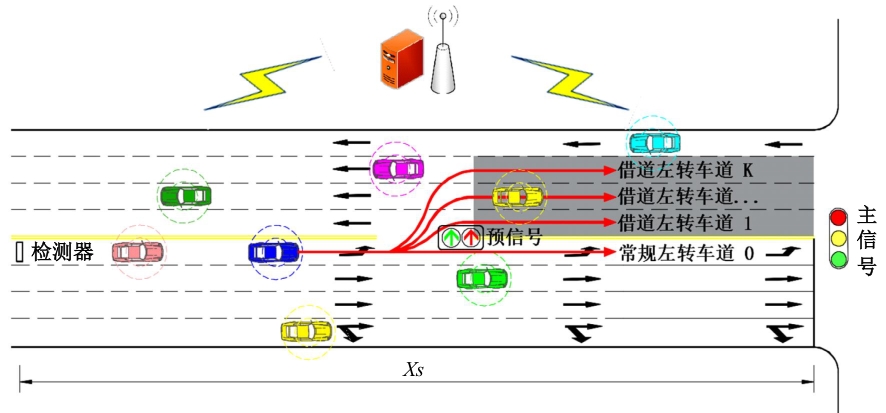
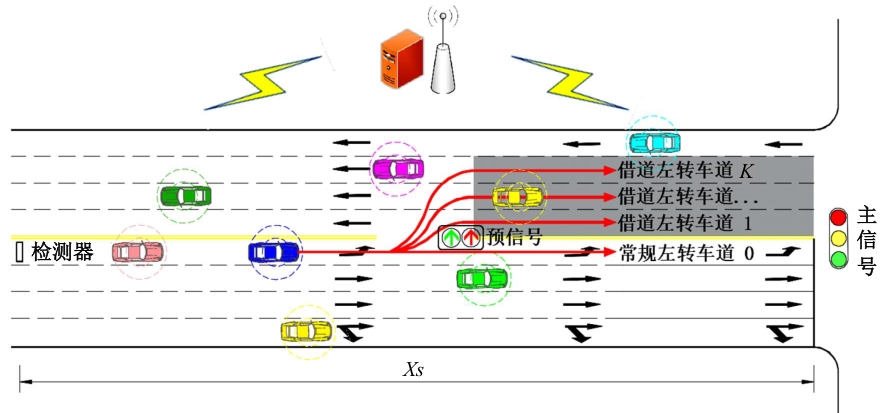
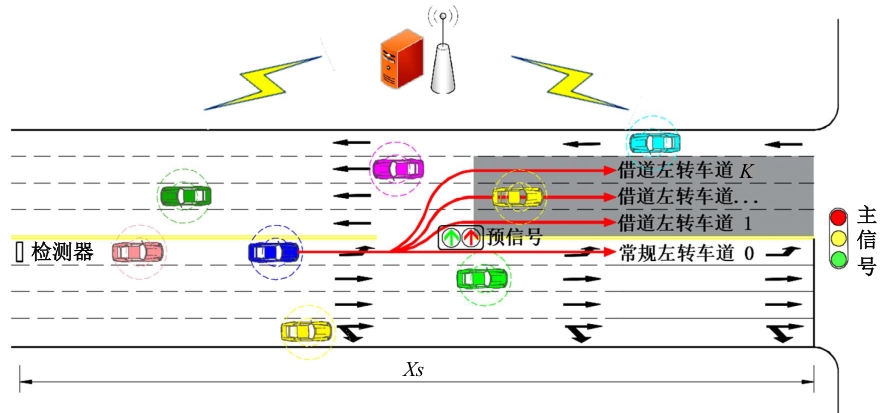
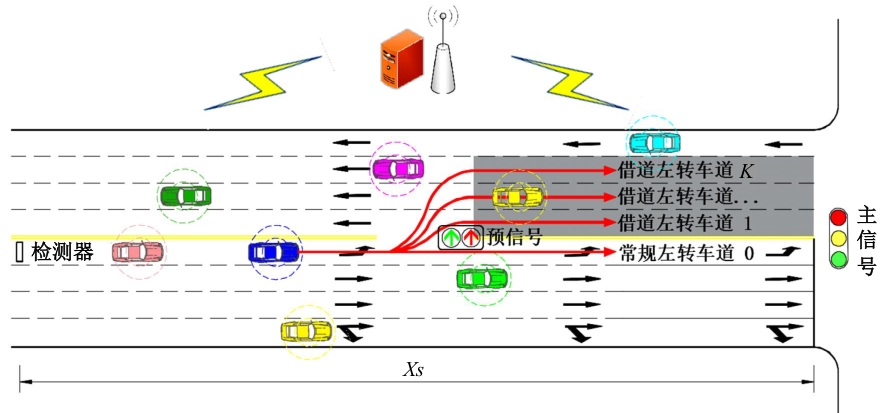
Optimal trajectory control for connected left-turn vehicles at exit lane for left-turn intersections
Yong-heng CHEN( ),Jia-wei YANG,Jing-yu SUN
),Jia-wei YANG,Jing-yu SUN
- College of Transportation,Jilin University,Changchun 130022,China
CLC Number:
- U491








| 1 | Zhang S M, Deng W W, Zhao Q R, et al. Dynamic trajectory planning for vehicle autonomous driving[C]∥2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 2013: 4161-4166. |
| 2 | Luo Y G, Xiang Y, Cao K, et al. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[J]. Transportation Research Part C: Emerging Technologies, 2016, 62: 87-102. |
| 3 | Lu G Y, Nie Y, Liu X B, et al. Trajectory-based traffic management inside an autonomous vehicle zone[J]. Transportation Research Part B: Methodological, 2019, 120: 76-98. |
| 4 | 贾彦峰, 曲大义, 林璐, 等. 基于运行轨迹的网联混合车流速度协调控制[J]. 吉林大学学报: 工学版, 2021, 51(6): 2051-2060. |
| Jia Yan-feng, Qu Da-yi, Lin Lu, et al. Coordinated speed control of connected mixed traffic flow based on trajectory[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2051-2060. | |
| 5 | Malikopoulos A A, Beaver L, Chremos I V. Optimal time trajectory and coordination for connected and automated vehicles[J]. Automatica, 2021, 125(6):No. 109469. |
| 6 | Liu Q, Zhao J, Zhou X. Optimal trajectory control for left-turn vehicles at exit lane for left-turn intersections[J]. Journal of Transportation Engineering, Part A: Systems, 2021(10):No. 0000576. |
| 7 | Jiang H, Hu J, An S, et al. Eco approaching at an isolated signalized intersection under partially connected and automated vehicles environment[J]. Transportation Research Part C: Emerging Technologies, 2017, 79(6): 290-307. |
| 8 | Ma J, Li X, Zhou F, et al. Parsimonious shooting heuristic for trajectory design of connected automated traffic part II: computational issues and optimization[J]. Transportation Research Part B, 2017, 95: 421-441. |
| 9 | Zhou F, Li X, Ma J. Parsimonious shooting heuristic for trajectory design of connected automated traffic part I: theoretical analysis with generalized time geography[J]. Transportation Research Part B Methodological, 2016, 95(1): 394-420. |
| 10 | Zhang L G, Liang W J, Zheng X Z. Eco-driving for public transit in cyber-physical systems using v2i communication[J]. International Journal of Intelligent Transportation Systems Research, 2018, 16(2): 79-89. |
| 11 | Zhao W M, Dong N. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802-821. |
| 12 | 黄意然,宋国华,彭飞,等. 考虑排队长度的信号交叉口生态驾驶轨迹优化[J]. 交通运输工程与信息学报, 2022, 20(3): 43-56. |
| Huang Yi-ran, Song Guo-hua, Peng Fei, et al. Trajectory optimization for eco-driving taking into account queuing Length at signalized intersections[J]. Journal of Transportation Engineering and Information, 2022, 20(3): 43-56. | |
| 13 | 刘显贵, 王晖年, 洪经纬, 等. 网联环境下信号交叉口车速控制策略及优化[J]. 交通运输系统工程与信息, 2021, 21(2): 82-90. |
| Liu Xian-gui, Wang Hui-nian, Hong Jing-wei, et al. Speed control stsrategy and optimization of signalized intersection in network environment[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(2): 82-90. | |
| 14 | Yao H D, Li X P. Lane-change-aware connected automated vehicle trajectory optimization at a signalized intersection with multi-lane roads[J]. Transportation Research Part C Emerging Technologies, 2021, 129:No. 103182. |
| [1] | Xi-zhen ZHOU,He GONG,Dun-dun LI,Yan-jie JI,Jie YAN. Nonlinear model for impact of built environment on curb parking spaces occupancy [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2520-2530. |
| [2] | Ya-qin QIN,Zheng-fu QIAN,Ji-ming XIE. Vehicle cooperative obstacle avoidance strategy driven by CLAM model and trajectory data [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1311-1322. |
| [3] | Ming-chen GU,Hui-yuan XIONG,Zeng-jun LIU,Qing-yu LUO,Hong LIU. Weight estimation model for trucks integrating multi-head attention mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(10): 2771-2780. |
| [4] | Wen-cai SUN,Xu-ge HU,Zhi-fa YANG,Fan-yu MENG,Wei SUN. Optimization of infrared-visible road target detection by fusing GPNet and image multiscale features [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(10): 2799-2806. |
| [5] | Hong-tao LI,Lin-hong WANG,Jun-da LI. Influence of lighting and speed limit on visual search ability at highway intersections [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2287-2297. |
| [6] | Wei-tiao WU,Kun ZENG,Wei ZHOU,Peng LI,Wen-zhou JIN. Deep learning method for bus passenger flow prediction based on multi-source data and surrogate-based optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(7): 2001-2015. |
| [7] | Zhen-liang LIU,Cun-bao ZHAO,Yun-peng WU,Mi-na MA,Long-shuang MA. Life⁃cycle seismic resilience assessment of highway bridge networks using data⁃driven method [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(6): 1695-1701. |
| [8] | Hong-fei JIA,Ying-jun XU,Li-li YANG,Nan WANG. League member selection and benefit distribution of commercial vehicles multi⁃modal transportation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1060-1069. |
| [9] | Yu-lin CHANG,Wen-qian XU,Chao SUN,Peng ZHANG. Day⁃to⁃day equilibrium of hybrid traffic considering obedience degree under internet of vehicles environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1085-1093. |
| [10] | Chao SUN,Hao-wei YIN,Wen-yun TANG,Zhao-ming CHU. Sensor deployment strategy and expansion inference of mobile phone data for traffic demand estimation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1070-1077. |
| [11] | Hui-zhen ZHANG,Zheng-kai GAO,Jian-qiang LI,Chen-xi WANG,Yu-biao PAN,Cheng WANG,Jing WANG. Short⁃term passenger flow forecasting of urban rail transit based on recurrent neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 430-438. |
| [12] | Jin XU,Yan-peng WANG,Hai-yuan CHEN,Xiao-bo ZHANG,Cun-shu PAN. Longitudinal driving characteristics and operating speed prediction model of cars on hairpin curves of mountainous roads [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3432-3445. |
| [13] | Zhi-wei LIU,Zheng-yun SONG,Jian-rong LIU. Impact of shared autonomous vehicles on choice of subway station connection methods [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3424-3431. |
| [14] | Xiu-feng CHEN,Yu-tong GUO,Yue-chen WU,Da-yi QU,Meng-yuan GAO. Multi-objective optimization of traffic signal timings based on dandelion algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3122-3129. |
| [15] | Wen-jing WU,Kang-bei XIONG,Li-li YANG,Si-xu PU. Optimization of bus transfer preferential strategy in passenger corridor based on mental account theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3113-3121. |
|
||