Journal of Jilin University(Engineering and Technology Edition) ›› 2026, Vol. 56 ›› Issue (2): 431-442.doi: 10.13229/j.cnki.jdxbgxb.20240783
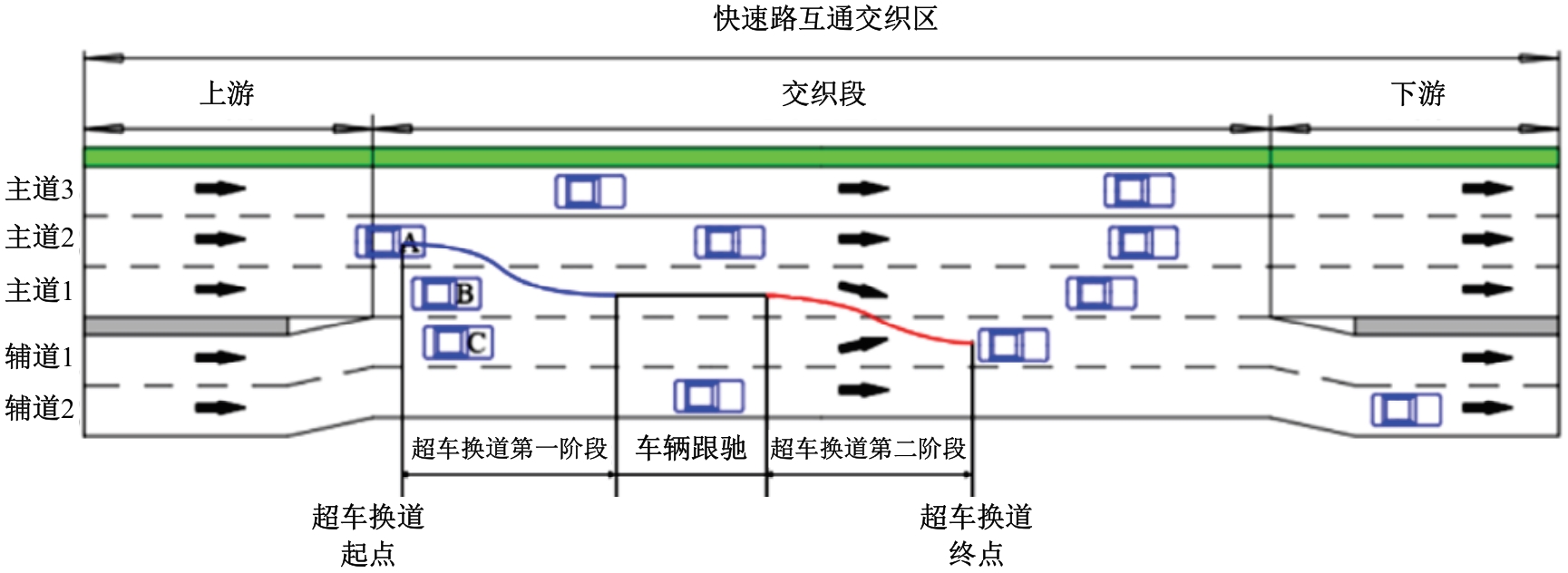
Behavior control method of overtaking lane-changing in expressway interchanging weaving area
Jian-xiao MA( ),Shuo HUAI,Yi ZHAO(),Ming-hao LI,Yu-xin CHEN,Si-yu ZHAO
),Shuo HUAI,Yi ZHAO(),Ming-hao LI,Yu-xin CHEN,Si-yu ZHAO
- College of Automobile and Traffic Engineering,Nanjing Forestry University,Nanjing 210037,China
CLC Number:
- U491






| [1] | Moridpour S, Sarvi M, Rose G. Lane changing models: a critical review[J]. Transportation Letters, 2010, 2(3): 157-173. |
| [2] | 耿新力. 城区不确定环境下无人驾驶车辆行为决策方法研究[D]. 合肥: 中国科学技术大学信息科学技术学院,2017. |
| Geng Xin-li. Research on behavior decision-making approaches for autonomous vehicle in urban uncertainty environments[D]. Hefei: School of Information Science and Technology,University of Science and Technology of China, 2017. | |
| [3] | 张航, 段和柱, 储泽宇. 城市快速路互通立交交织区长度可靠性设计[J]. 重庆交通大学学报: 自然科学版, 2023, 42(3): 98-104. |
| Zhang Hang, Duan He-zhu, Chu Ze-yu. Reliability design of weaving segment length of urban expressway interchange[J]. Journal of Chongqing Jiaotong University (Natural Science),2013, 42(3): 98-104. | |
| [4] | 陈亮, 何志超, 李巧茹, 等. 多车道城市快速路交织区拥堵形成机制[J]. 中国安全科学学报, 2018, 28(6): 73-78. |
| Chen Liang, He Zhi-chao, Li Qiao-ru, et al. Study on congestion mechanism in multi-lane weaving section of urban expressway[J]. China Safety Science Journal, 2018, 28(6): 73-78. | |
| [5] | 李岩, 陈姜会, 曾明哲, 等. 考虑天气影响的高速公路交织区交通运行状态识别[J]. 交通运输系统工程与信息, 2023, 23(6): 111-119. |
| Li Yan, Chen Jiang-hui, Zeng Ming-zhe, et al. Identification of traffic operation status in freeway weaving segments considering weather effects[J]. Journal of Transportation Systems Engineering and Information Technology, 2023, 23(6): 111-119. | |
| [6] | 张卫华, 刘嘉茗, 解立鹏, 等. 混合网联环境快速路交织区交通流特性分析[J]. 东南大学学报: 自然科学版, 2023, 53(1): 156-164. |
| Zhang Wei-hua, Liu Jia-ming, Xie Li-peng, et al. Analysis on the characteristics of traffic flow in expressway weaving area under mixed connected and autonomous environment[J]. Journal of Southeast University (Natural Science Edition), 2023, 53(1): 156-164. | |
| [7] | Wang L, Abdel-Aty M, Shi Q, et al. Real-time crash prediction for expressway weaving segments[J]. Transportation Research Part C: Emerging Technologies, 2015, 61: 1-10. |
| [8] | 谢济铭, 夏玉兰, 钱正富, 等. 考虑智能网联近邻车辆信息的交织区换道风险预警[J]. 交通运输工程学报, 2023, 23(2): 287-300. |
| Xie Ji-ming, Xia Yu-lan, Qian Zheng-fu, et al. Lane-change risk warning in interweaving area considering information from intelligent connected near-neighboring vehicles[J]. Journal of Traffic and Transportation Engineering, 2023, 23(2):287-300. | |
| [9] | 彭博, 王玉婷, 谢济铭, 等. 城市干线短交织区元胞自动机多级换道决策模型[J]. 交通运输系统工程与信息,2020,20(4):41-48. |
| Peng Bo, Wang Yu-ting, Xie Ji-ming, et al. Multi-stage lane changing decision model of urban trunk road's short weaving area based on cellular automata[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(4): 41-48. | |
| [10] | Zhao C W, Zhao Y, Wang Z Q, et al. Choice of lane-changing point in an urban intertunnel weaving section based on random forest and support vector machine[J]. Promet-Traffic & Transportation, 2023, 35(2): 161-174. |
| [11] | Li M H, Zhao Y, Ma J X, et al. A study on the impact of overtaking lane-changing behavior in expressway interchange weaving areas[J]. Promet-Traffic & Transportation, 2024, 36(5): 973-987. |
| [12] | 李珣, 马文哲, 赵征凡, 等. 车路协同下基于行车指引的改进STCA双车道换道模型[J]. 东南大学学报:自然科学版, 2020, 50(6): 1134-1142. |
| Li Xun, Ma Wen-zhe, Zhao Zheng-fan, et al. Improved STCA lane changing model for two-lane road based on driving guidance under CVIS[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(6): 1134-1142. | |
| [13] | Zhou Z, Zhao Y, Li M H, et al. A causal inference-based speed control framework for discretionary lane-changing processes[J]. Journal of Transportation Engineering Part A—Systems, 2023, 49(8): 1-26. |
| [14] | Yang D, Zheng S, Wen C, et al. A dynamic lane-changing trajectory planning model for automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 228-247. |
| [15] | 吕伟, 黄广琛, 汪京辉. 基于元胞自动机的高速公路瓶颈交通演化仿真[J]. 交通运输系统工程与信息, 2022, 22(3): 293-302. |
| Lv Wei, Huang Guang-chen, Wang Jing-hui. Simulation of highway traffic bottleneck via cellular automata[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(3): 293-302. | |
| [16] | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. |
| Zhang Yi, Yao Dan-ya, Li Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. | |
| [17] | 黄玲, 郭亨聪, 张荣辉, 等. 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020, 33(7): 156-166. |
| Huang Ling, Guo Heng-cong, Zhang Rong-hui, et al. LSTM-based lane changing behavior model for unmanned vehicle under environment of heterogeneous human-driven and autonomous vehicles[J]. China Journal of Highway and Transport, 2020, 33(7): 156-166. | |
| [18] | Luo Y, Xiang Y, Cao K, et al. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[J]. Transportation Research Part C: Emerging Technologies, 2016, 62: 87-102. |
| [19] | 曲大义, 黑凯先, 郭海兵, 等. 车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报: 工学版, 2022, 52(1): 101-109. |
| Qu Da-yi, Kai-xian Hei, Guo Hai-bing, et al. Game behavior and model of lane-changing on the internet of vehicles environment[J]. Journal of Jilin University (Engineering and Technology Edition), 2022,52(1): 101-109. | |
| [20] | Wu Y, Abdel-Aty M, Zheng O, et al. Automated safety diagnosis based on unmanned aerial vehicle video and deep learning algorithm[J]. Transportation Research Record, 2020, 2674(8): 350-359. |
| [21] | 王祺, 谢娜, 侯德藻, 等. 自适应巡航及协同式巡航对交通流的影响分析[J].中国公路学报, 2019, 32(6): 188-197. |
| Wang Qi, Xie Na, Hou De-zao, et al. Effects of adaptive cruise control and cooperative adaptive cruise control on traffic flow[J]. China Journal of Highway and Transport, 2019, 32(6): 188-197. |
| [1] | Rong-han YAO,Wen-yan QI,Hong-yu HU,Xiao-jing DU,Yan-feng QIAO,Li-bing WANG. Multi-lane cellular automata model considering bus-high occupancy vehicle lane [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 162-174. |
| [2] | Xiu-jian YANG,Xiao-han JIA,Sheng-bin ZHANG. Characteristics of mixed traffic flow taking account effect of dynamics of vehicular platoon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 947-958. |
| [3] | Xian-yan KUANG,Zi-ru CHEN. Dynamic game comity behavior at pedestrians′ crossing on unsignal-controlled roads based on cellular automata [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 837-846. |
| [4] | Jin-guo WANG,Kai HUANG,Rui-fang YAN,Shuai REN,Zhi-qiang WANG,Jin GUO. Effect of carbon equivalent elements on fluidity of hypoeutectic ductile iron by cellular automata finite element method [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 855-865. |
| [5] | SU Shu-jie, HE Lu. Transient dynamic congestion evacuation model of pedestrian at walk traffic planning crossroads [J]. 吉林大学学报(工学版), 2018, 48(2): 440-447. |
| [6] | WEI Li-ying, CUI Yu-feng, WEI Jia-rong. Cellular automata model based on local maximum entropy lane-changing rules for electric bicycle flow [J]. 吉林大学学报(工学版), 2017, 47(5): 1436-1445. |
| [7] | WEI Li-ying,WU Rong-hua,WANG Zhi-long,ZHU Jian-hui. Lane-changing behavior based on mixed traffic flow [J]. 吉林大学学报(工学版), 2014, 44(5): 1321-1326. |
| [8] | DING Zhong-jun,WANG Bing-hong. Traffic behavior of T-shaped intersection system under signal controlling compared with unsignalized model [J]. 吉林大学学报(工学版), 2009, 39(增刊2): 83-0086. |
|
||