吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (11): 3062-3068.doi: 10.13229/j.cnki.jdxbgxb.20220784
壁面清洗水下机器人清洗性能分析与试验
王晓鸣( ),李腾
),李腾
- 天津科技大学 机械工程学院,天津 300222
Analysis on cleaning performance and experiment of underwater cleaning robot for surface
Xiao-ming WANG(),Teng LI
- School of Mechanical Engineering,Tianjin University of Science and Technology,Tianjin 300222,China
摘要:
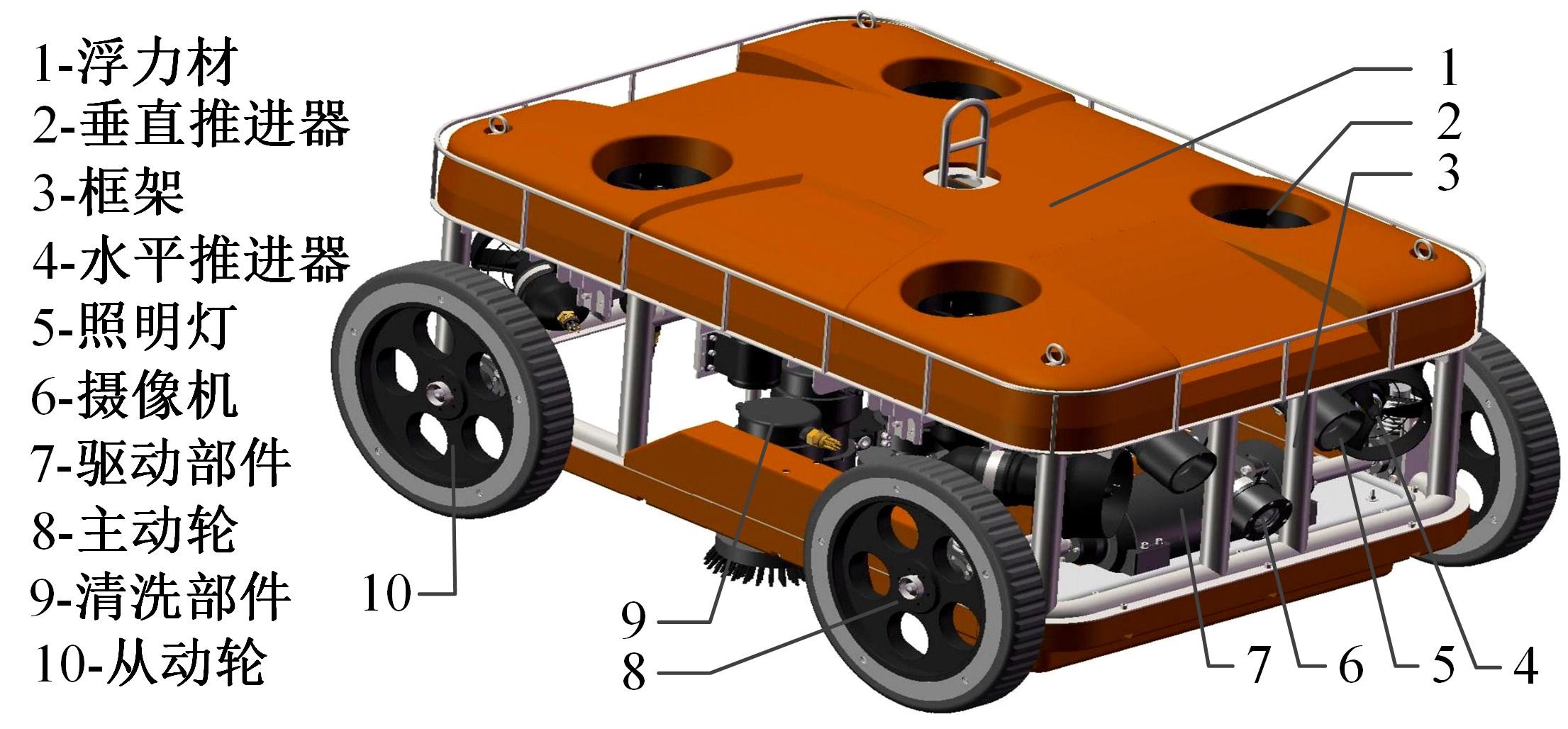
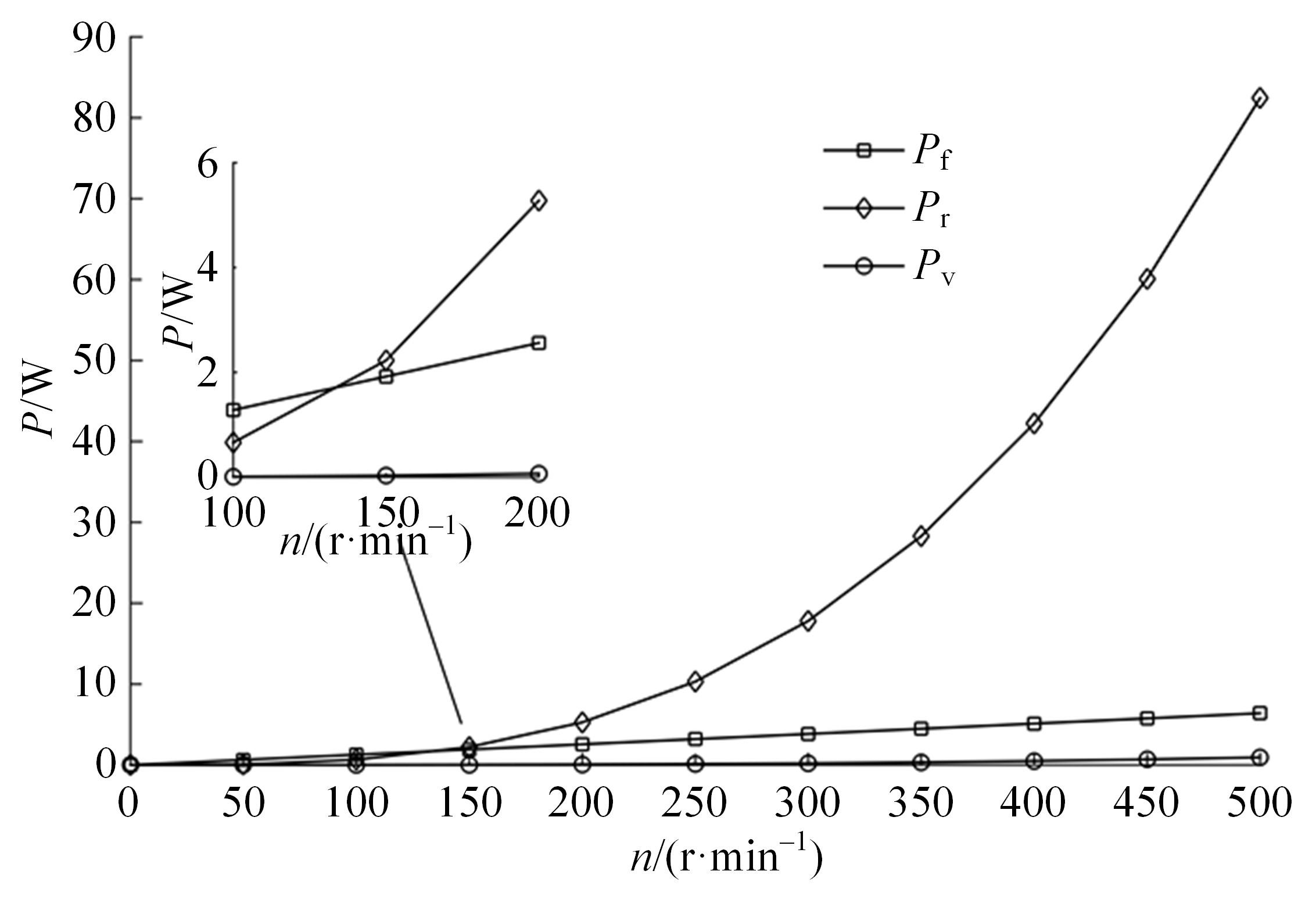
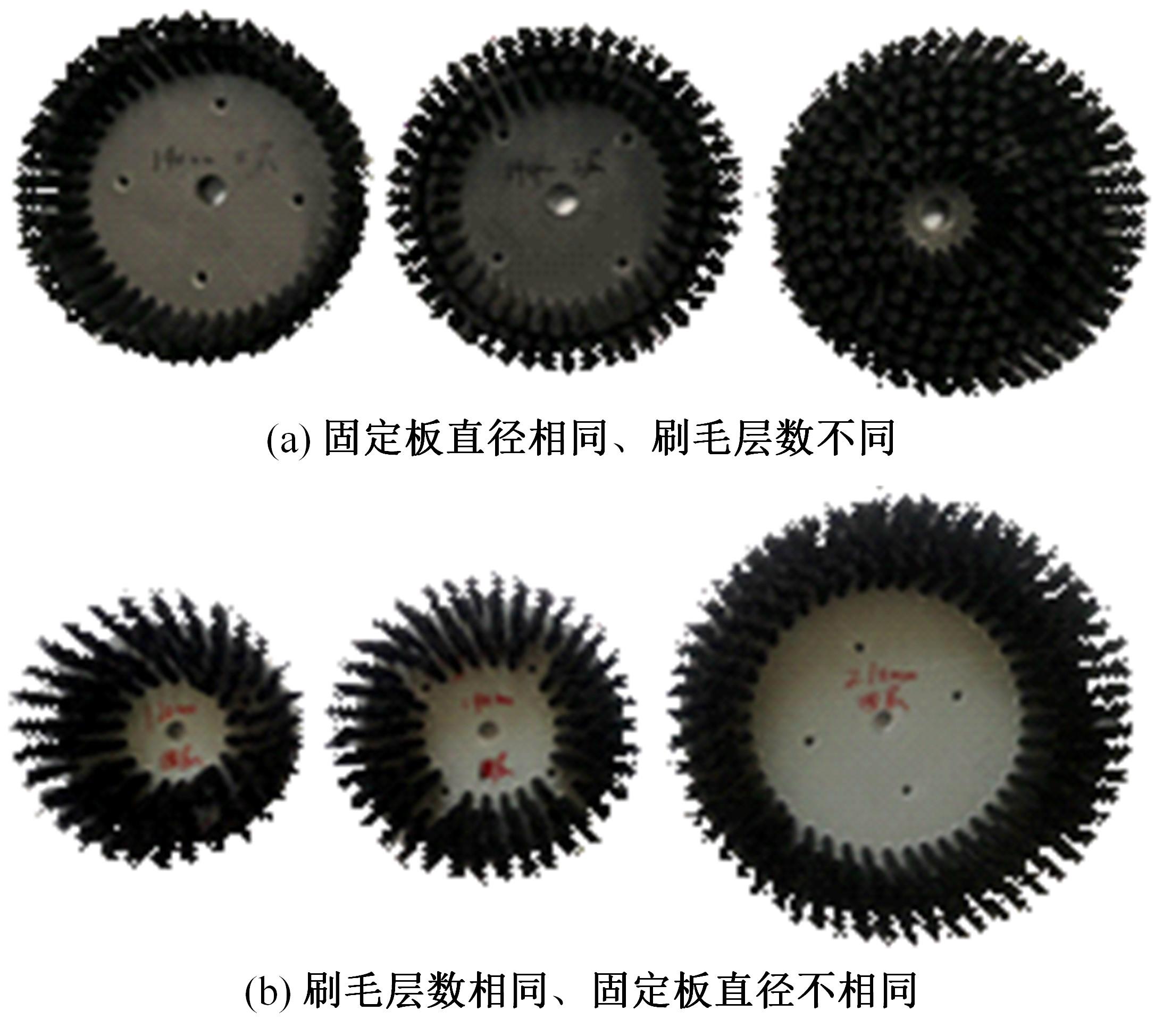
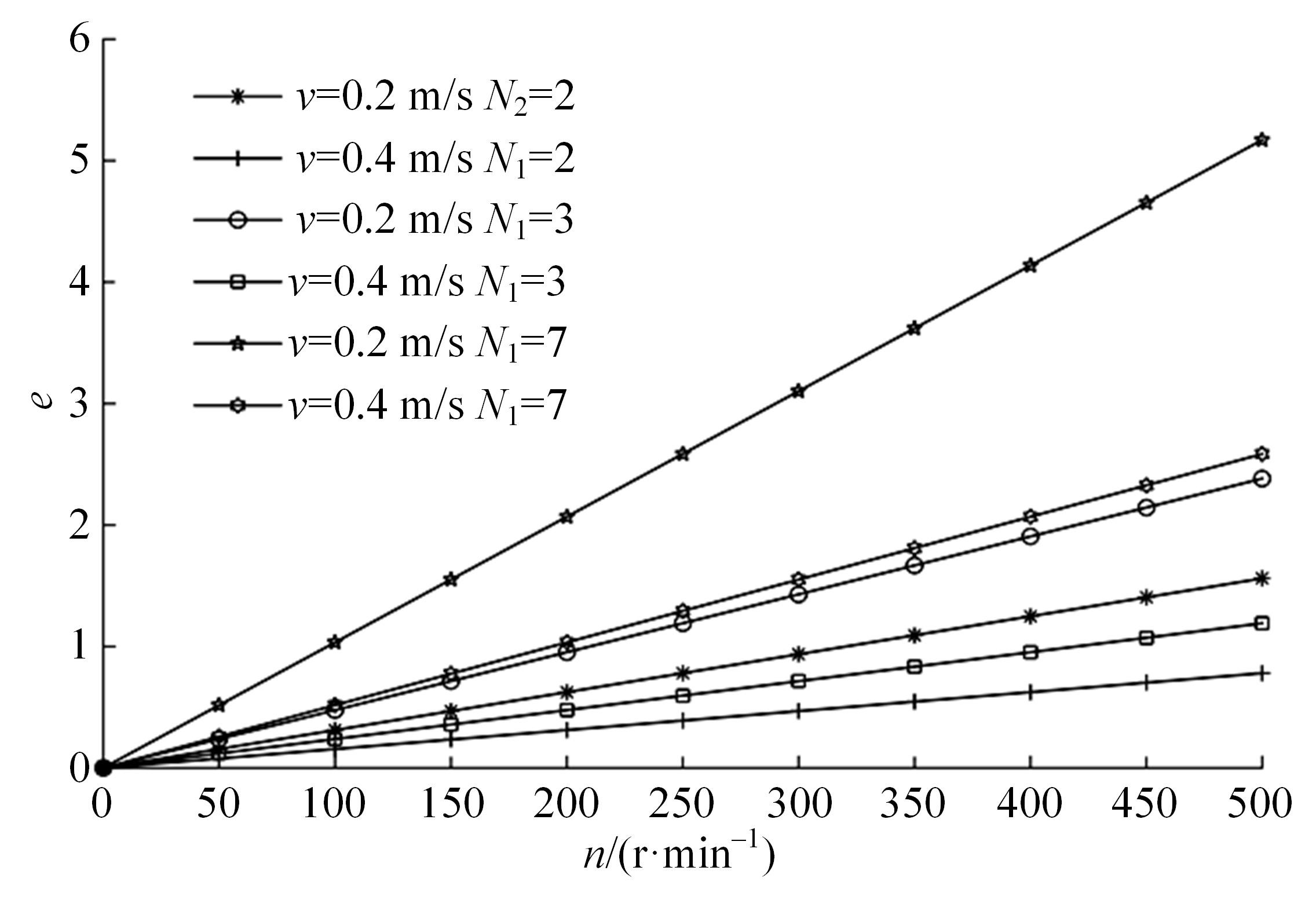
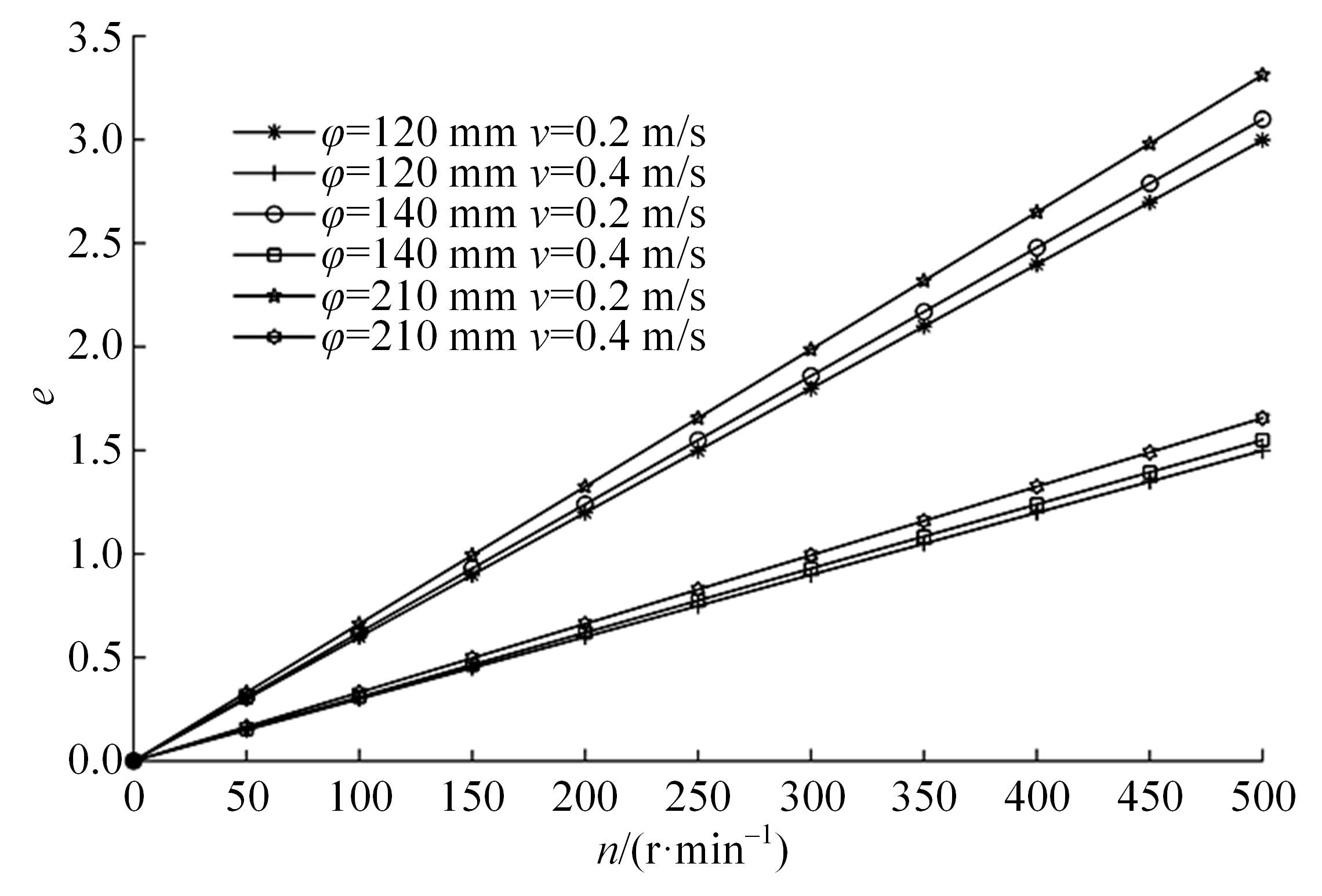
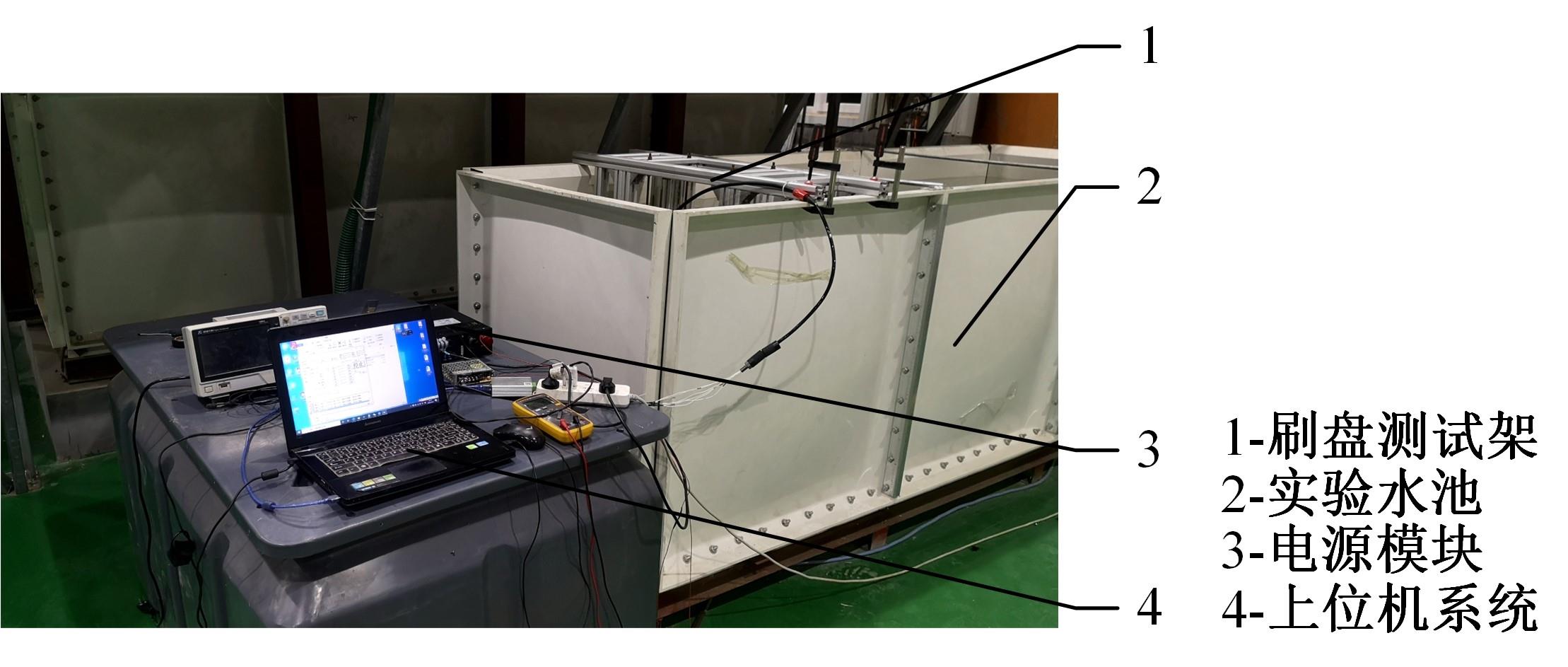
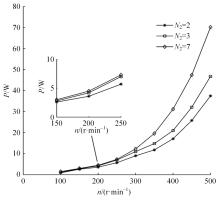
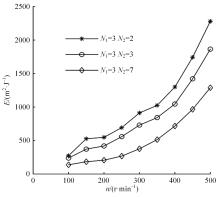
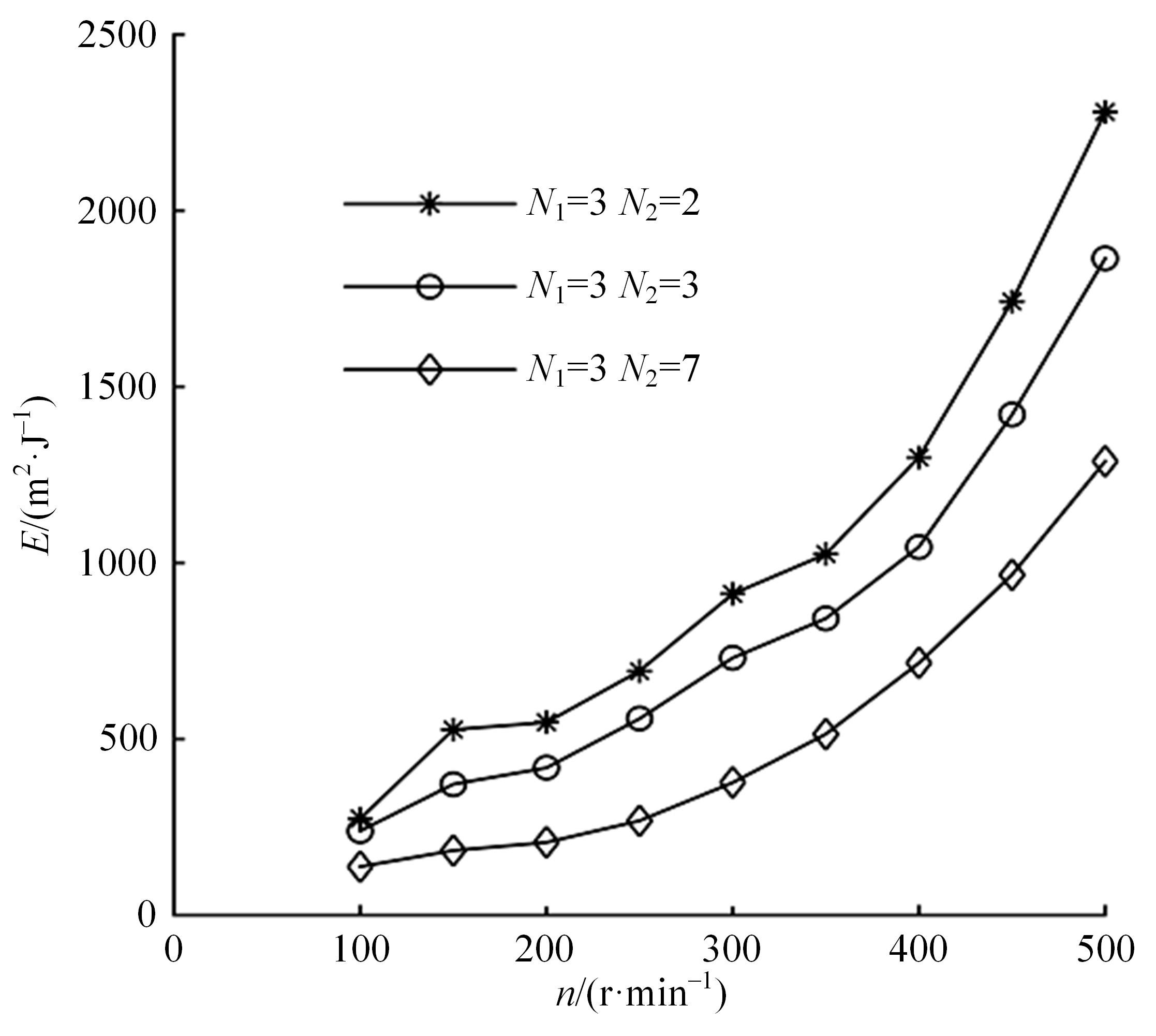
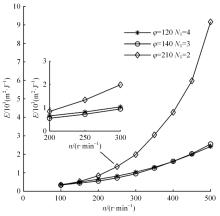
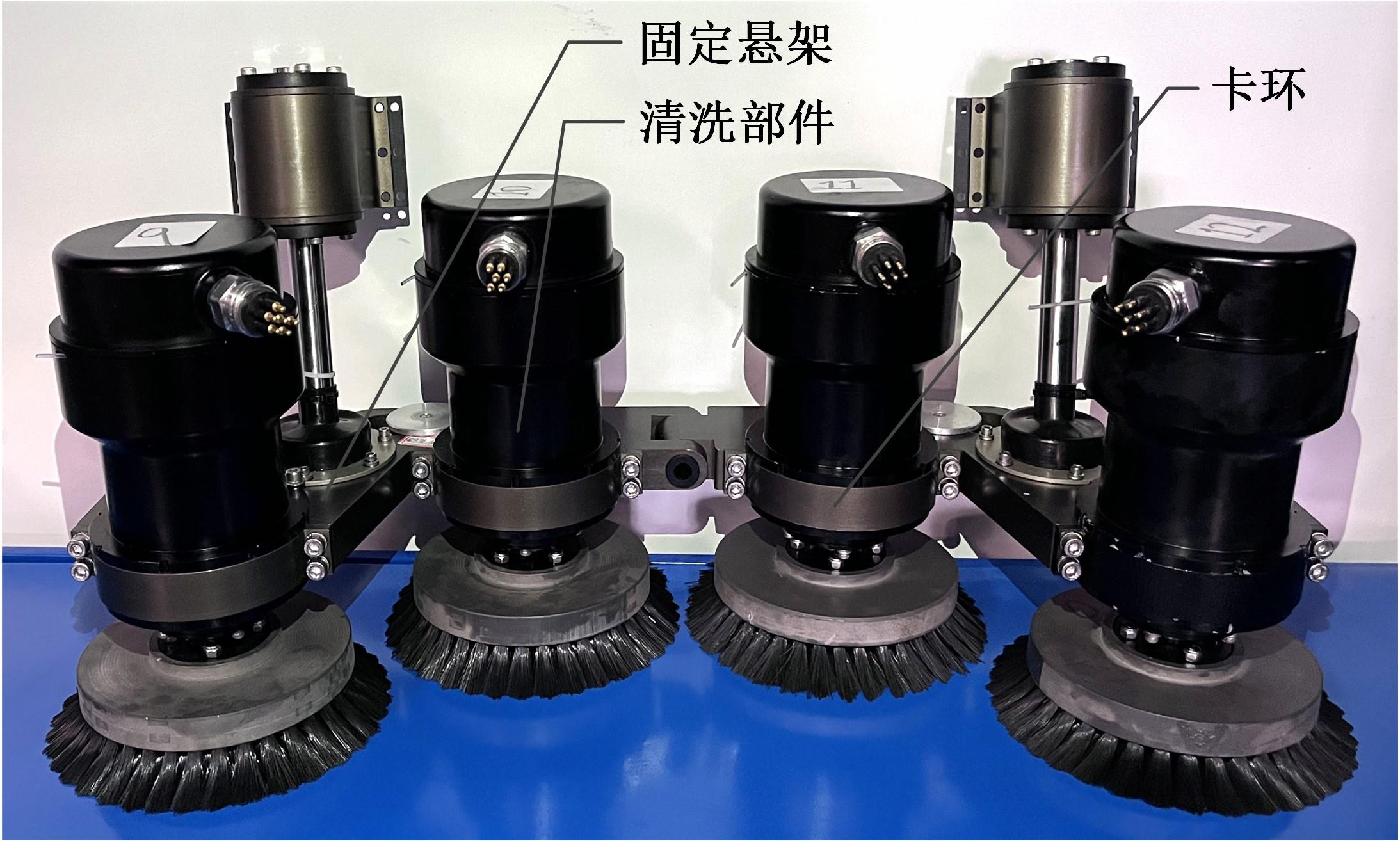
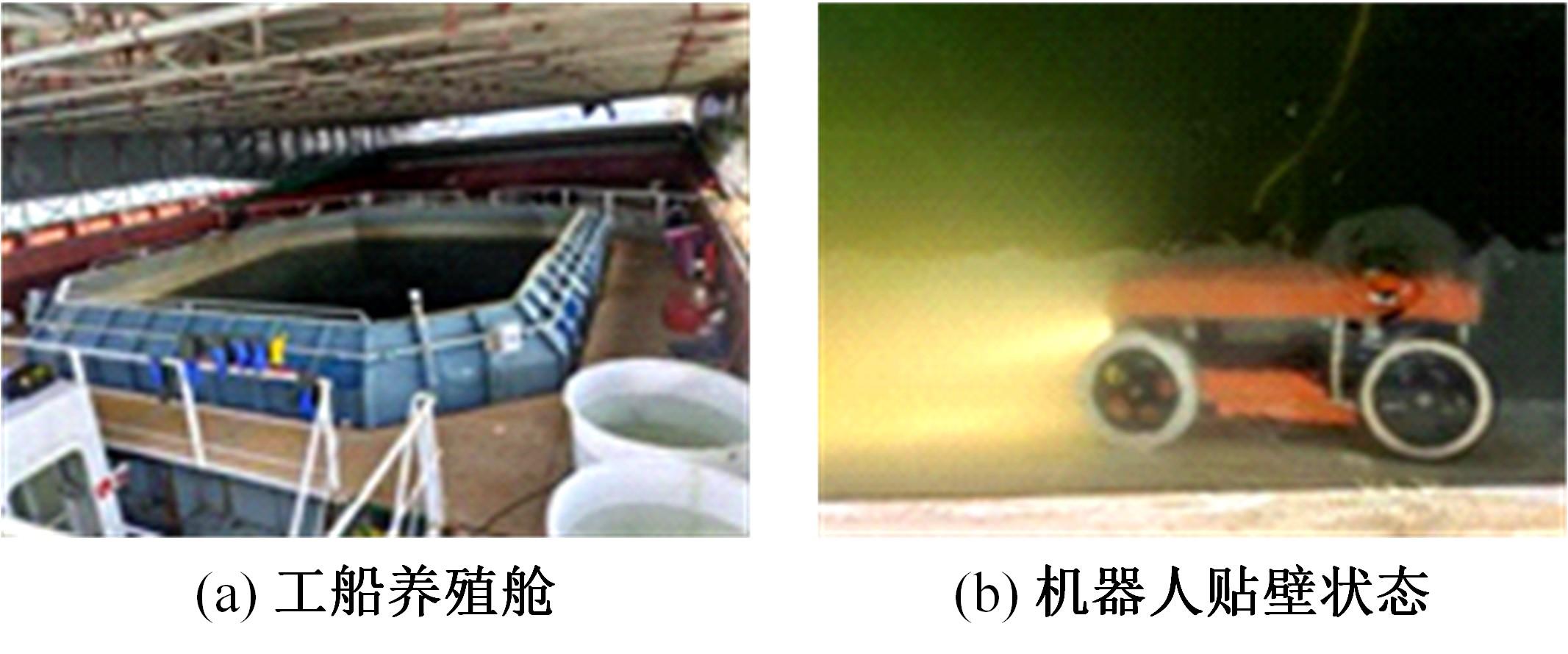
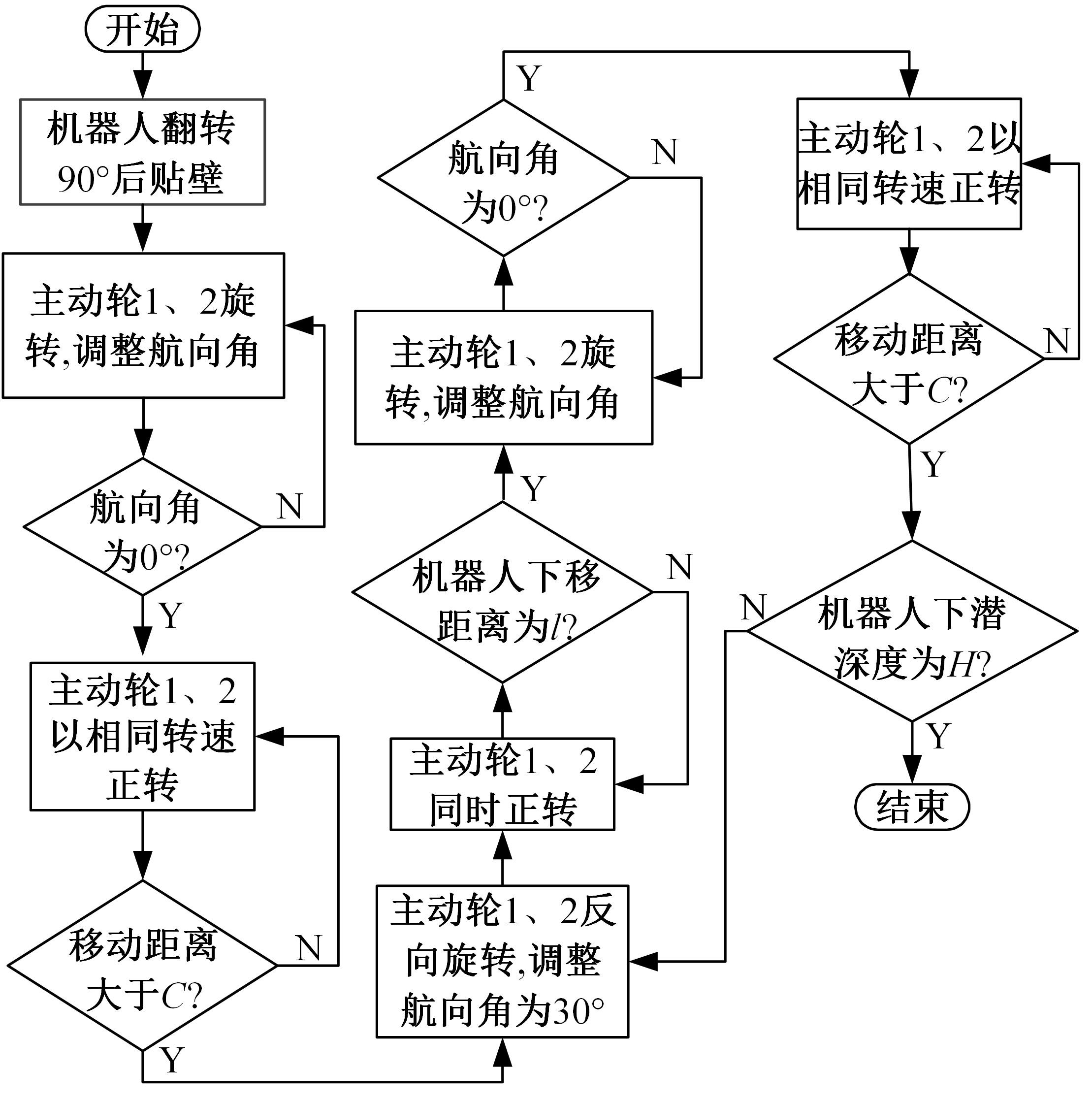
针对附着在养殖舱壁面上的污染物和剩余饵料人工难以清洗问题,研发了一款可对壁面进行自动清洗的水下机器人,该机器人为转刷清洗、推力吸附、轮式移动机构的设计方案。通过对实验刷盘进行清洗率、清洗能耗分析,确定刷盘的设计和布置方式,完成机器人移动速度与刷盘转速的匹配。分析结果表明,当刷盘转速一定时,增加刷毛层数或降低机器人移动速度可提高清洗率;机器人为小尺寸刷盘的布置方式时可降低清洗能耗。通过试验测试,机器人可贴壁稳定航行,当机器人移动速度为0.2 m/s,刷盘转速为200 r/min时,清洗效果显著,清洗效率为388 m2/h,可满足实际工况下的使用要求。
中图分类号:
- TP242








| 1 | 何皛磊, 张海文. “深海渔场”的应用前景[J]. 船舶, 2018, 29(2): 1-6. |
| He Zhen-lei, Zhang Hai-wen. Application prospect of "deep-sea fishing ground"[J]. Ship & Boat, 2018, 29(2): 1-6. | |
| 2 | 娄花. 媲美野生大黄鱼, 国内首批工船养殖大黄鱼起捕上市[J]. 水产科技情报, 2021, 48(2): 86-86. |
| Lou Hua. Comparable to wild pseudosciaena crocea, the first batch of cultured pseudosciaena crocea in China has been caught and listed[J]. Fisheries Science & Technology Information, 2021, 48(2): 86-86. | |
| 3 | 陈彦臻, 胡以怀. 船体清洗机器人的开发现状与展望[J]. 船舶工程, 2017, 39(10): 62-69. |
| Chen Yan-zhen, Hu Yi-huai. Development status and prospect of ship hull cleaning robot[J]. Ship Engineering, 2017, 39(10): 62-69. | |
| 4 | Wang C, Li Z, Wang T.Intelligent fish farm-the future of aquaculture[J]. Aquaculture International: Journal of the European Aquaculture Society, 2021, 29(6): 2681-2711. |
| 5 | 黄达, 倪琦, 胡勇兵, 等. 水下鱼池清刷机器人系统设计与试验分析[J]. 渔业现代化, 2019, 46(6): 29-34. |
| Huang Da, Ni Qi, Hu Yong-bing, et al. Design and experimental analysis of underwater fish tank cleaning robot system[J]. Fishery Modernization, 2019, 46(6): 29-34. | |
| 6 | 夏慧. 船舶表面生物附着规律与清刷机器人研究[D]. 哈尔滨: 哈尔滨工程大学机电工程学院, 2018. |
| Xia Hui. Study on biological attachment law of ship surface and cleaning robot[D]. Harbin: College of Electromechanical Engineering, Harbin Engineering University, 2018. | |
| 7 | 仝宝国. 扫路车盘刷系统设计与仿真分析[D]. 长春: 吉林大学机械科学与工程学院, 2012. |
| Tong Bao-guo. Design and simulation analysis of road sweeper disc brush system[D]. Changchun: College of Mechanical Science and Engineering, Jilin University, 2012. | |
| 8 | 刘征. 船舶清洗水下机器人的设计及水动力分析[D]. 天津: 河北工业大学机械工程学院, 2020. |
| Liu Zheng. Design and hydrodynamic analysis of underwater robot for ship cleaning[D]. Tianjin: College of Mechanical Engineering, Hebei University of Technology, 2020. | |
| 9 | 武建国, 刘冬, 王晓鸣, 等. 船壁清洗水下机器人水动力分析与试验研究[J]. 船舶工程, 2018, 40(3): 91-97. |
| Wu Jian-guo, Liu Dong, Wang Xiao-ming, et al. Hydrodynamic analysis and experimental study of underwater robot for cleaning hull[J]. Ship Engineering, 2018, 40(3): 91-97. | |
| 10 | 高善群. 液体中圆柱转子旋转运动的阻力研究[D]. 洛阳: 河南科技大学机械工程学院, 2013. |
| Gao Shan-qun. Resistance research on cylindrical rotor rotating in fluid[D]. Luoyang: College of Mechanical Engineering, Henan University of Science and Technology, 2013. |
| [1] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
|