吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (7): 2115-2120.doi: 10.13229/j.cnki.jdxbgxb.20230402
• 通信与控制工程 • 上一篇
基于GPS-UWB组合定位技术的混合运动目标实时跟踪方法
张楠1( ),钟本源2,王平1
),钟本源2,王平1
- 1.山西大同大学 机电工程学院,山西 大同 037003
2.山西大同大学 煤炭工程学院,山西 大同 037003
Real time tracking method for hybrid moving targets based on GPS-UWB combined positioning technology
Nan ZHANG1(),Ben-yuan ZHONG2,Ping WANG1
- 1.College of Mechanical and Electrical Engineering,Shanxi Datong University,Datong 037003,China
2.College of Coal Engineering,Shanxi Datong University,Datong 037003,China
摘要:
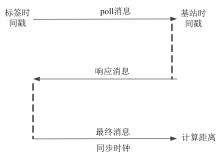
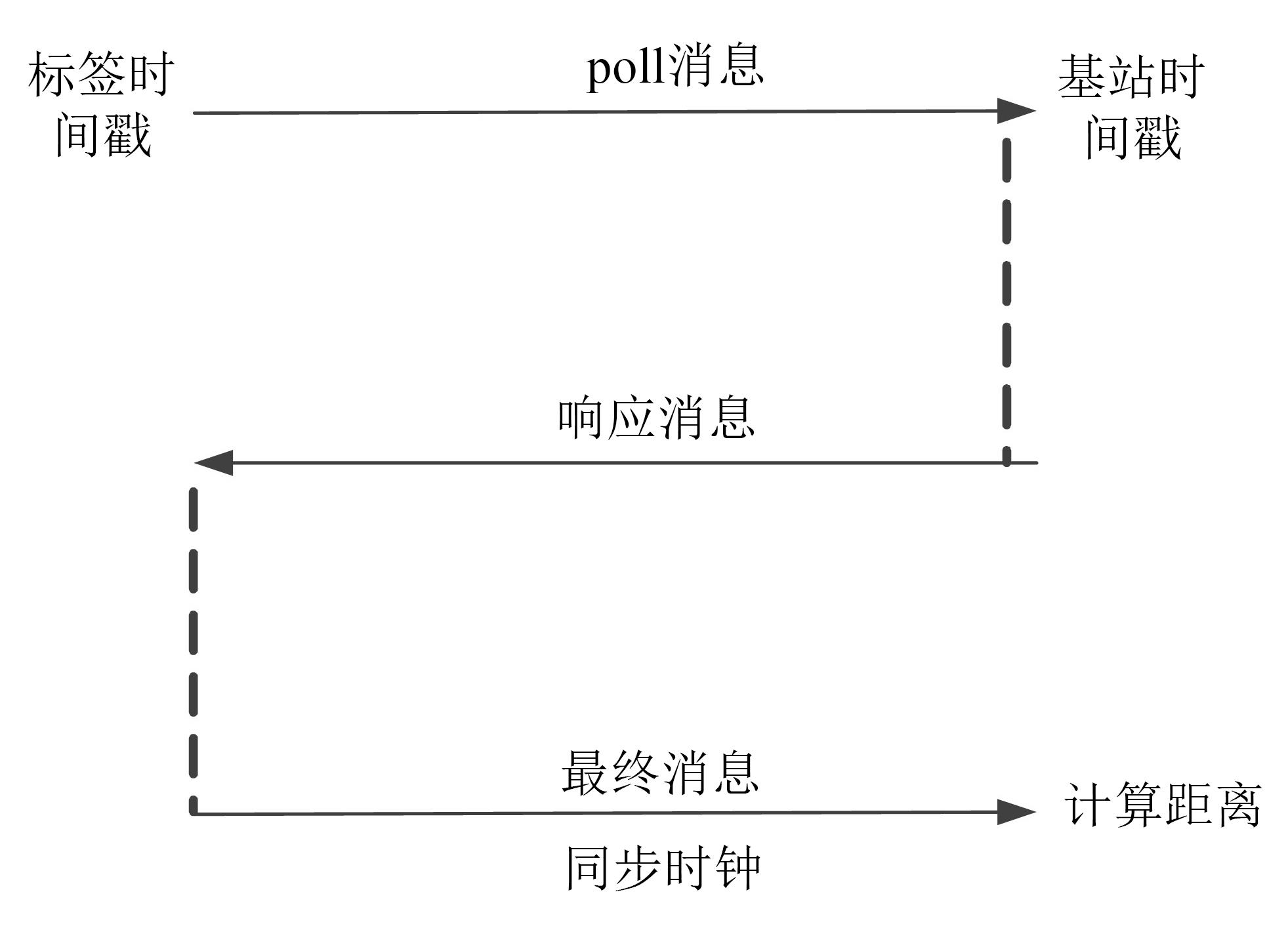
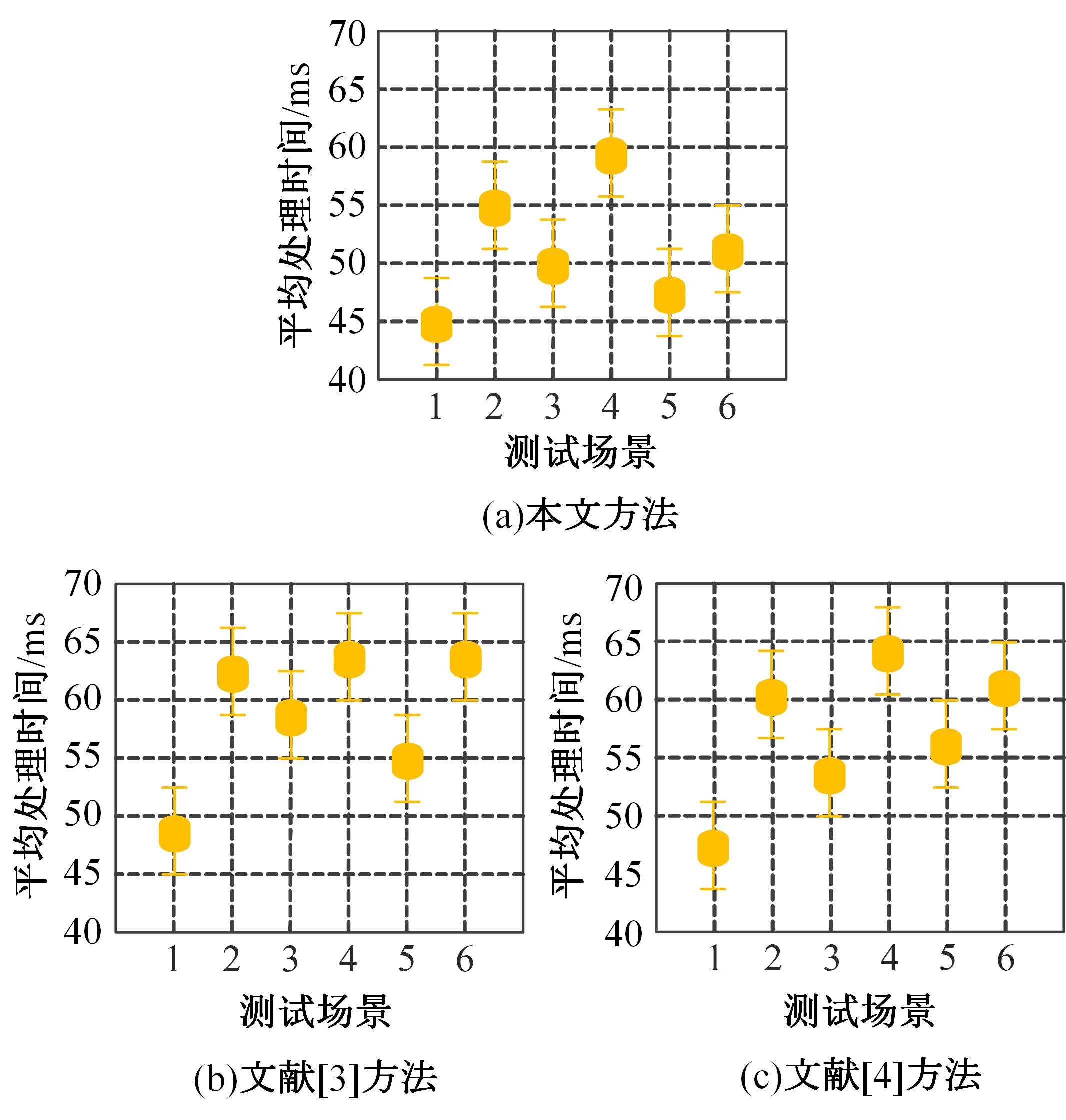
为了全面提升混合运动目标实时跟踪结果的准确性,提出一种基于GPS-UWB组合定位技术的混合运动目标实时跟踪方法。建立混合运动目标图像的三维表面信息重组模型,通过多维像素重构方法展开混合运动目标的信息融合和运动特征点标定,分析不同目标点的差异性特征向量。同时引入GPS-UWB组合定位技术对混合运动目标点展开实时优化定位,最终实现混合运动目标实时跟踪。实验测试结果表明,采用本文方法可获取稳定性更高且误差更小的混合运动目标实时跟踪结果。
中图分类号:
- TP391







| 1 | 詹慧菁,黄宇.用于混合运动姿态捕捉的李代数算法优化仿真[J].计算机仿真,2022,39(11):253-257. |
| Zhan Hui-jing, Huang Yu.Optimal simulation of Lie algebra algorithm for hybrid motion attitude capture[J].Computer Simulation,2022,39(11):253-257. | |
| 2 | 尹旷,王红斌,胡帆,等.利用开关卡尔曼滤波器的目标跟踪技术研究[J].机床与液压,2021,49(12):23-28, 40. |
| Yin Kuang, Wang Hong-bin, Hu Fan, et al. Research on target tracking technology based on switched Kalman filter[J]. Machine Tool & Hydraulics, 2021,49 (12): 23-28, 40. | |
| 3 | 张玉涛,张梦凡,史学强,等.基于深度学习的井下运动目标跟踪算法研究[J].煤炭工程,2022,54(10):151-155. |
| Zhang Yu-tao, Zhang Meng-fan, Shi Xue-qiang, et al. Object tracking algorithm of moving objects in underground mine based on deep learning[J]. Coal Engineering, 2022, 54(10): 151-155. | |
| 4 | 逯彦,廖桂生,黄庆享.结合稀疏表示的跨摄像头运动目标跟踪算法[J].西安电子科技大学学报,2021,48(2):197-204. |
| Lu Yan, Liao Gui-sheng, Huang Qing-xiang. Cross-camera moving target tracking algorithm based on sparse representation[J]. Journal of Xidian University, 2021,48(2): 197-204. | |
| 5 | 苏昂,陆伟康,张仕林,等.基于目标运动模型的无人机对地视觉目标跟踪[J].激光与光电子学进展,2022,59(14):243-251. |
| Su Ang, Lu Wei-kang, Zhang Shi-lin, et al. Visual ground target tracking of unmanned aerial vehicle based on target motion model[J]. Laser & Optoelectronics Progress, 2022, 59(14): 243-251. | |
| 6 | 曲志昱,王超然,孙萌.基于改进迭代扩展卡尔曼滤波的3星时频差测向融合动目标跟踪方法[J].电子与信息学报,2021,43(10):2871-2877. |
| Qu Zhi-yu, Wang Chao-ran, Sun Meng. Tracking method of moving target for three-satellite TDOA/FDOA/DOA system based on improved IEKF algorithm[J]. Journal of Electronics & Information Technology, 2021,43(10): 2871-2877. | |
| 7 | 夏爱明,伍雪冬.基于上下文感知和尺度自适应的实时目标跟踪[J].红外技术,2021,43(5):429-436. |
| Xia Ai-ming, Wu Xue-dong. Real-time object tracking based on context awareness and scale adaptation[J]. Infrared Technology, 2021,43(5): 429-436. | |
| 8 | 张昆,王涛,张艳,等.一种基于面阵摆扫式航空影像的特征匹配方法[J].地球信息科学学报,2022,24(3):522-532. |
| Zhang Kun, Wang Tao, Zhang Yan, et al. A feature matching method based on area array swing-scan aerial image[J]. Journal of Geo-information Science, 2022, 24(3): 522-532. | |
| 9 | 申亮,金添,黄晓涛.结合形状信息的SAR图像特征匹配方法[J].信号处理,2023,39(2):252-262. |
| Shen Liang, Jin Tian, Huang Xiao-tao. SAR image feature matching method combined with shape information[J]. Journal of Signal Processing, 2023,39(2): 252-262. | |
| 10 | 于秋野,徐锦程,何睿,等.基于多普勒耦合估计的弹道目标测距方法[J].雷达科学与技术,2022,20(3):305-310. |
| Yu Qiu-ye, Xu Jin-cheng, He Rui, et al. Ballistic target ranging method based on Doppler coupling estimation[J]. Radar Science and Technology, 2022, 20(3): 305-310. | |
| 11 | 牛龙飞.基于LFMCW雷达测距的空中目标轨迹测量方法[J].火力与指挥控制,2022,47(6):171-175. |
| Niu Long-fei. Research on aerial target trajectory measurement method based on LFMCW radar ranging[J]. Fire Control & Command Control, 2022,47(6): 171-175. | |
| 12 | 巫春玲,胡雯博,孟锦豪,等.基于最大相关熵扩展卡尔曼滤波算法的锂离子电池荷电状态估计[J].电工技术学报,2021,36(24):5165-5175. |
| Wu Chun-ling, Hu Wen-bo, Meng Jin-hao, et al. State of charge estimation of lithium-ion batteries based on maximum correlation-entropy criterion extended Kalman filtering algorithm[J]. Transactions of China Electrotechnical Society, 2021,36(24): 5165-5175. | |
| 13 | 周萌萌,张冰,赵强,等.基于自适应渐消Sage-Husa扩展卡尔曼滤波的协同定位算法[J].中国舰船研究,2022,17(4):92-97. |
| Zhou Meng-meng, Zhang Bing, Zhao Qiang, et al. Cooperative localization algorithm based on adaptive fading Sage-Husa extended Kalman filter[J]. Chinese Journal of Ship Research, 2022,17(4): 92-97. | |
| 14 | 朱栋,徐晗,周寅,等.基于扩展卡尔曼滤波算法的船载绝对重力测量数据处理[J].物理学报,2022,71(13):159-167. |
| Zhu Dong, Xu Han, Zhou Yin, et al. Data processing of shipborne absolute gravity measurement based on extended Kalman filter algorithm[J]. Acta Physica Sinica, 2022,71(13): 159-167. | |
| 15 | 周娟,孙啸,刘凯,等.联合扩展卡尔曼滤波的滑模观测器SOC估算算法研究[J].中国电机工程学报,2021,41(2):692-703. |
| Zhou Juan, Sun Xiao, Liu Kai, et al. Research on the SOC estimation algorithm of combining sliding mode observer with extended Kalman filter[J]. Proceedings of the CSEE, 2021,41(2): 692-703. |
| [1] | 张楠,史建华,亿吉,王平. 基于加权质心定位的井下移动目标实时跟踪方法[J]. 吉林大学学报(工学版), 2023, 53(5): 1458-1464. |
| [2] | 王宣,刘晶红. 遮挡环境下采用分层局部敏感直方图的实时目标跟踪[J]. 吉林大学学报(工学版), 2015, 45(2): 663-669. |
| [3] | 黄永平, 常鹏飞, 郭凯, 金玉善. 基于事件注入机制的软件调试方法与实现[J]. 吉林大学学报(工学版), 2012, 42(增刊1): 373-376. |
|
||