吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (7): 2104-2114.doi: 10.13229/j.cnki.jdxbgxb.20221174
• 通信与控制工程 • 上一篇
基于路侧毫米波雷达的群体车辆目标识别与跟踪
李立1( ),吴晓强1,杨文臣2,3,周瑞杰1,汪贵平1()
),吴晓强1,杨文臣2,3,周瑞杰1,汪贵平1()
- 1.长安大学 电子与控制工程学院,西安 710064
2.云南省交通规划设计研究院有限公司 陆地交通气象灾害防治技术国家工程实验室,昆明 650200
3.云南省数字交通重点实验室,昆明 650103
Target recognition and tracking of group vehicles based on roadside millimeter-wave radar
Li LI1(),Xiao-qiang WU1,Wen-chen YANG2,3,Rui-jie ZHOU1,Gui-ping WANG1()
- 1.School of Electronic and Control Engineering,Chang'an University,Xi'an 710064,China
2.National Engineering Laboratory for Surface Transportation Weather Impacts Prevention,Broadvision Engineering Consultants Co. ,Ltd,Kunming 650200,China
3.Yunnan Key Laboratory of Digital Communications,Kunming 650103,China
摘要:
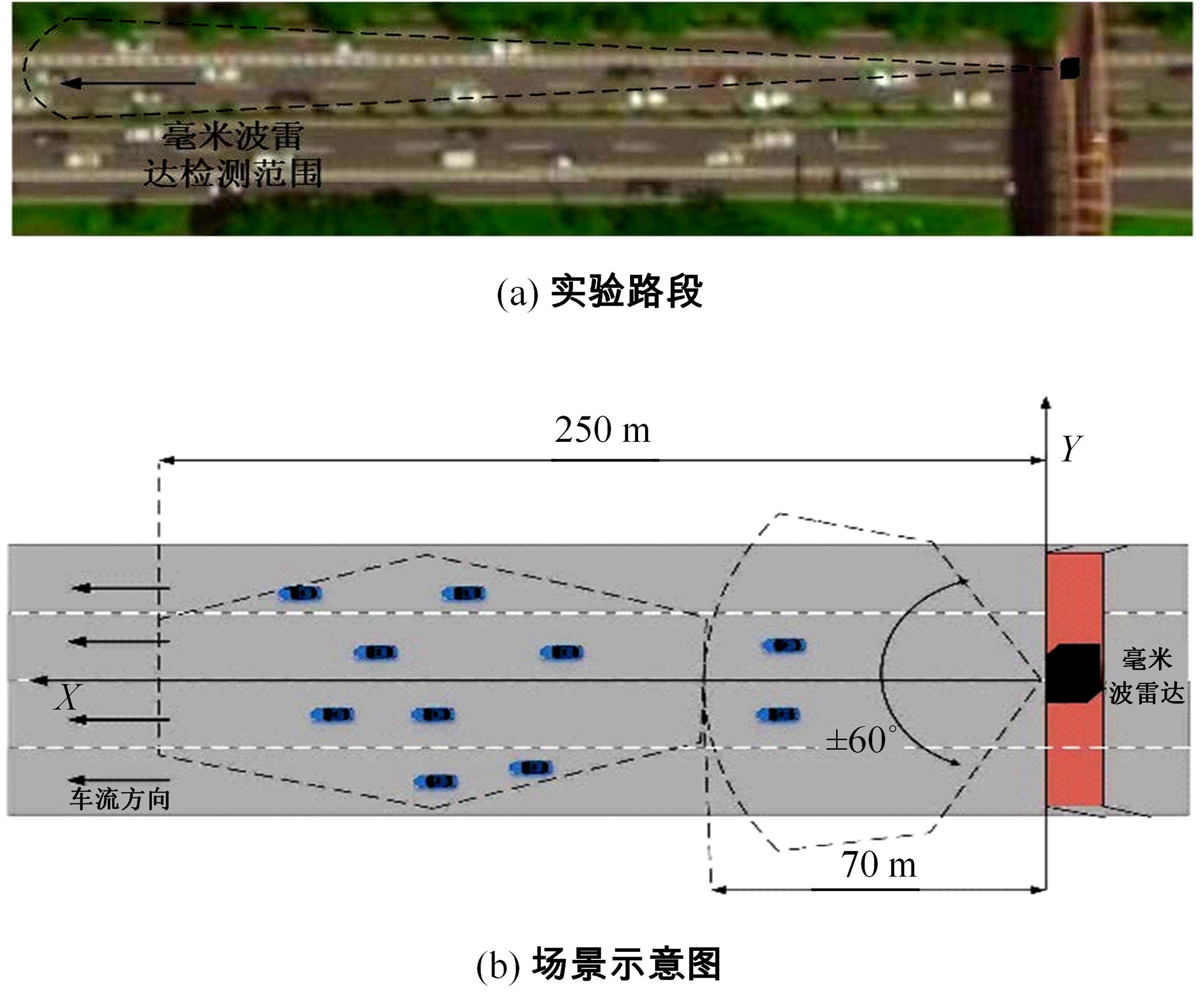
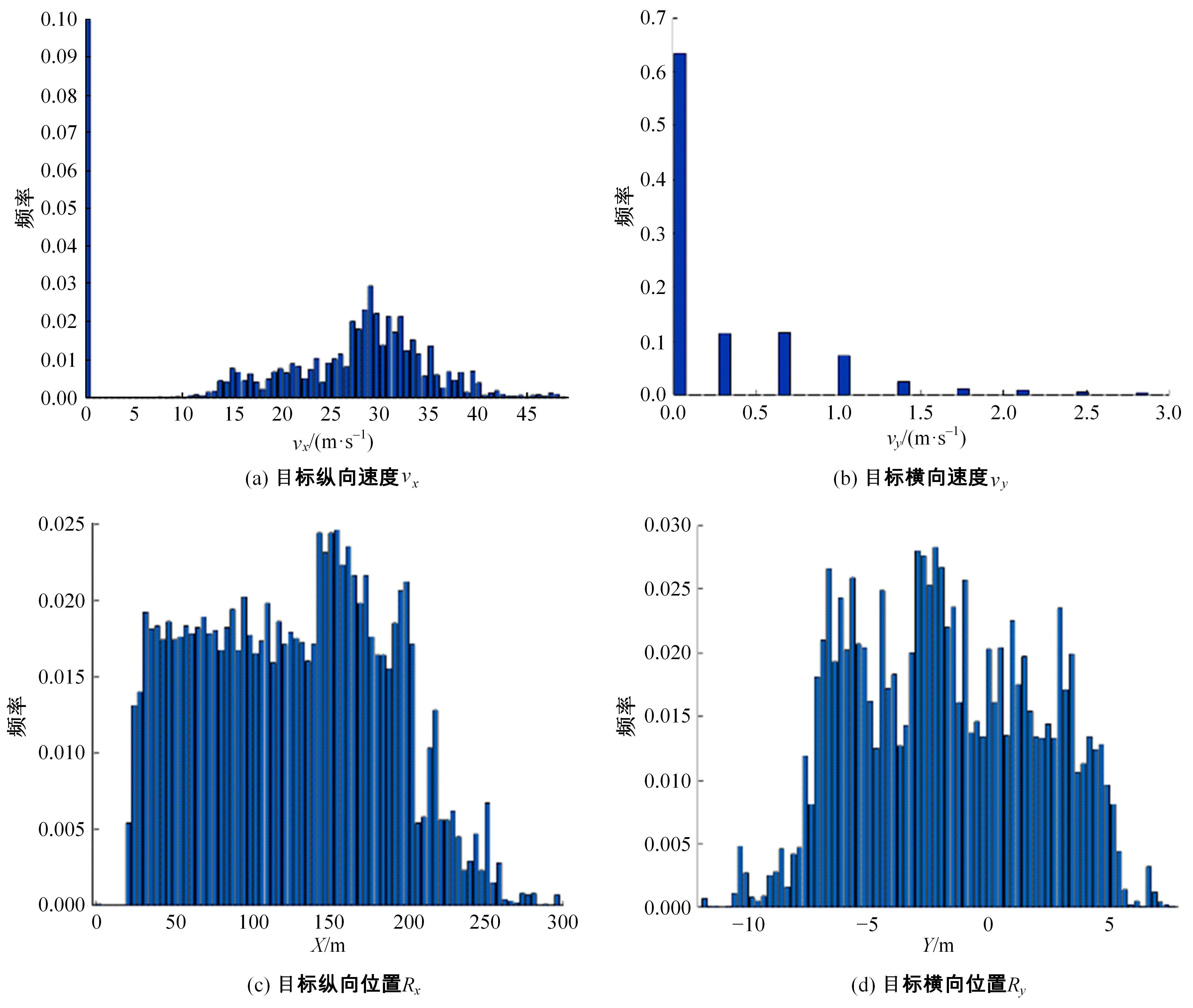
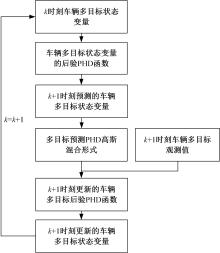
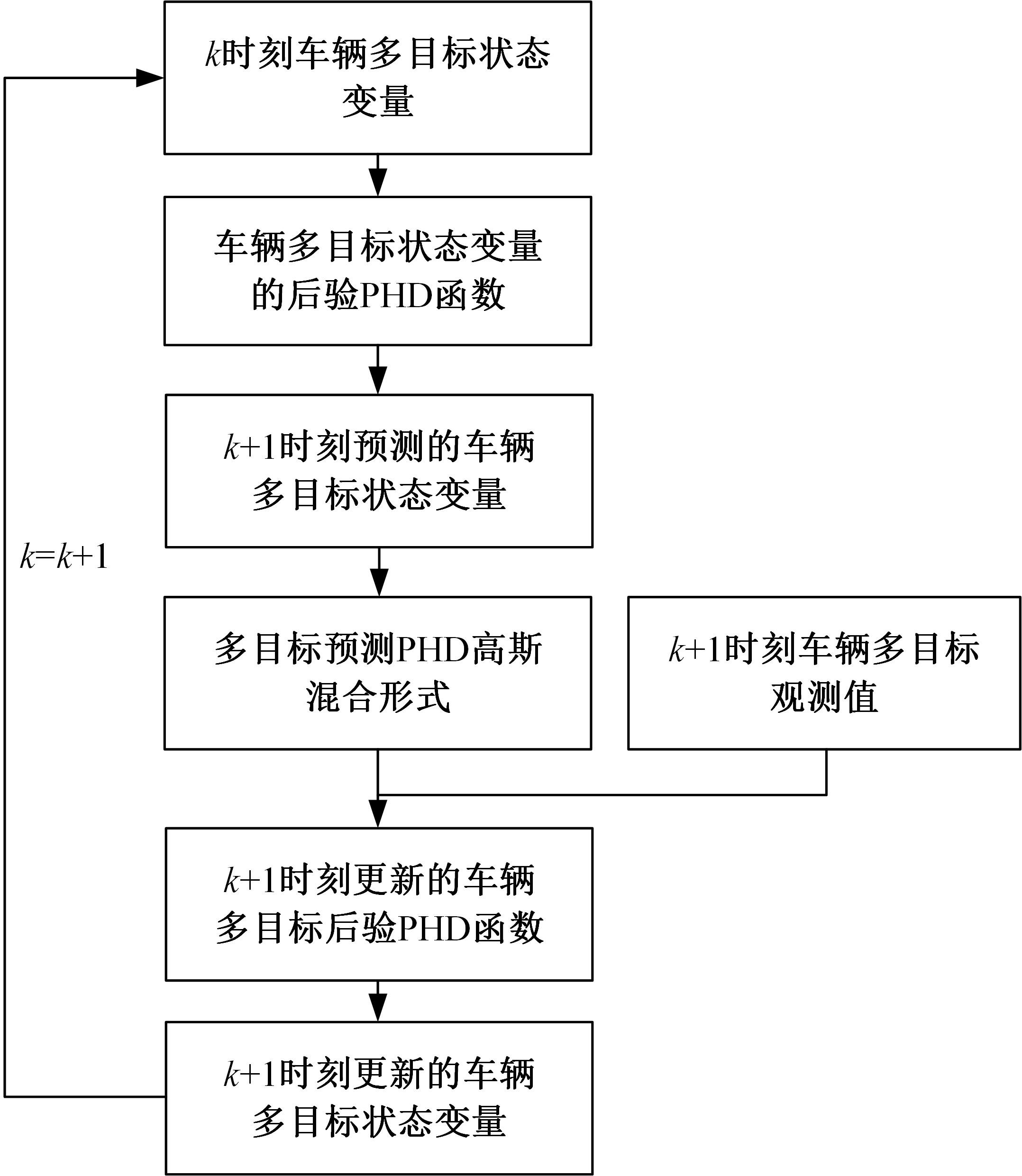
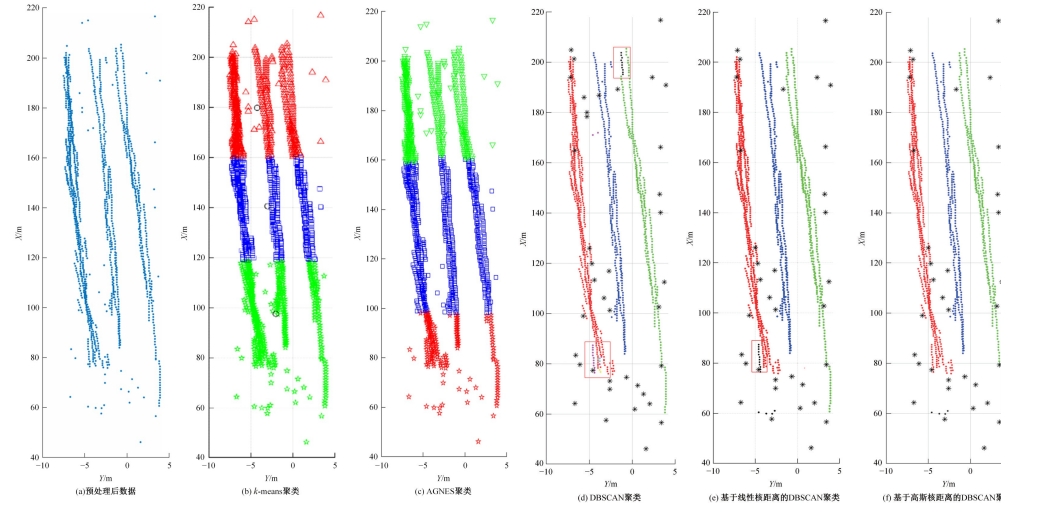
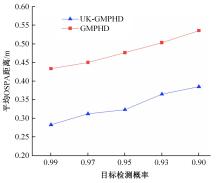
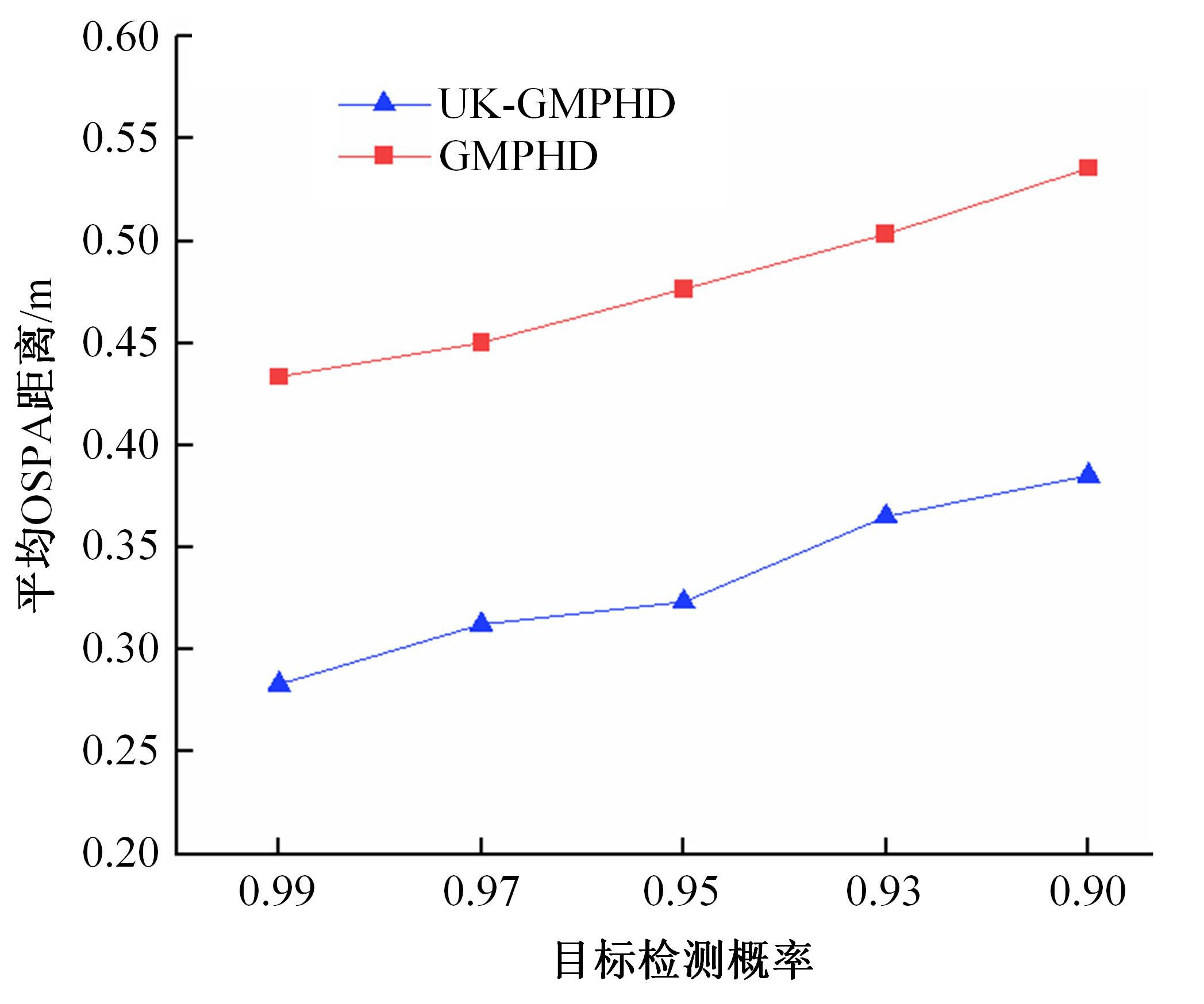
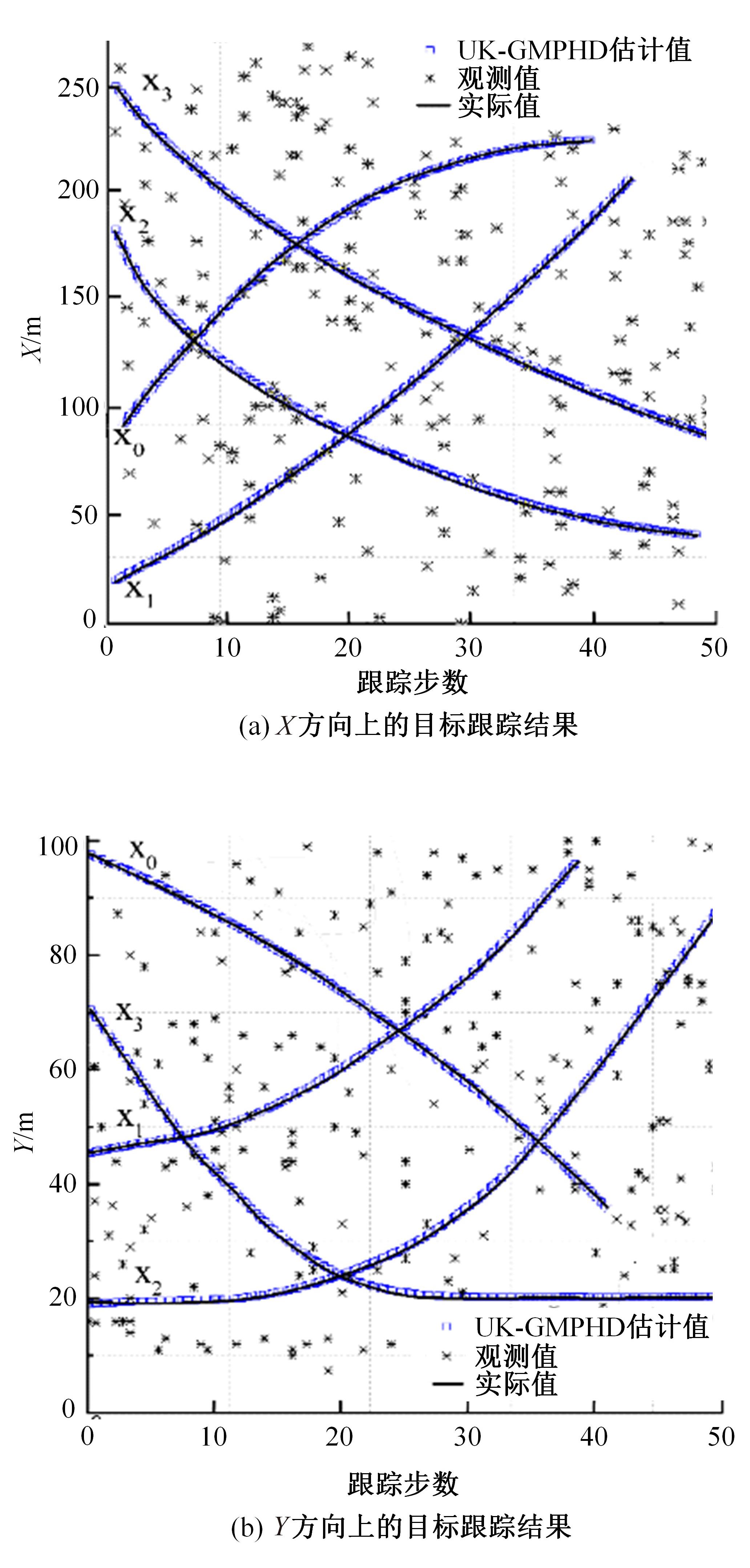
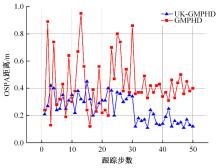
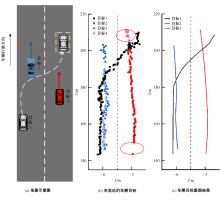
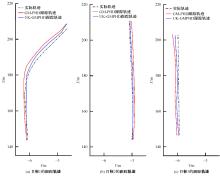
为了提升道路交通流检测精度,本文提出了一种基于路侧毫米波雷达的群体车辆识别与跟踪方法。首先,基于预处理后的城市多车道主干路交通流毫米波雷达检测数据,提出了一种基于高斯核距离的带噪声密度空间聚类(DBSCAN)算法,实现对群体车辆所反射有效雷达信号的时空聚类;其次,提出了一种无迹卡尔曼滤波(UKF)和线性高斯混合概率假设密度(GMPHD)融合算法,以提升非线性运动群体车辆的跟踪精度;最后,在仿真和实际环境中进行算法测试,仿真结果验证了UK-GMPHD算法能够精准、稳定地跟踪非线性运动车辆。实测结果表明:基于核距离的DBSCAN算法能够有效改善经典算法特征向量的调参问题;与GMPHD算法对比,UK-GMPHD算法对目标跟踪的距离、速度和角度均方根误差分别减少了21.03%、23.41%和20.67%。
中图分类号:
- TN953




| 1 | Jiang Q, Zhang L, Meng D. Target detection algorithm based on MMW radar and camera Fusion[C]∥ 2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, 2019: No.19211454. |
| 2 | Brodeski D, Bilik I, Giryes R. Deep radar detector[C]∥2019 IEEE Radar Conference, Boston, 2019: No.18993501. |
| 3 | Wang Z, Miao X, Huang Z, et al. Research of target detection and classification techniques using millimeter-wave radar and vision sensors[J]. Remote Sensing, 2021, 13(6): 1064-1086. |
| 4 | Cao L, Wang T, Wang D, et al. Lane determination of vehicles based on a novel clustering algorithm for intelligent traffic monitoring[J]. IEEE Access, 2020(8): 63004-63017. |
| 5 | 张钰, 林雨田, 高利, 等. 基于毫米波雷达的静态目标识别与跟踪[C]∥2021中国汽车工程学会年会论文集. 北京:机械工业出版社, 2021: 96-102. |
| Zhang Yu, Lin Yu-tian, Gao Li, et al. Static target recognition and tracking based on Millimeter Wave Radar[C]∥ 2021 the Annual Meeting of China Society of Automotive Engineering. Beijing: China Machine Press, 2021: 96-102. | |
| 6 | Ikram M, Ali M. 3D object tracking in millimeter-wave radar for advanced driver assistance systems[C]∥ 2013 IEEE Global Conference on Signal and Information Processing, Austin, 2013: 723-726. |
| 7 | Cui H, Wu J, Zhang J. 3D detection and tracking for on-road vehicles with a monovision camera and dual low-cost 4D mm wave radars[C]∥ 2021 IEEE International Intelligent Transportation Systems Conference, Indianapolis, 2021: 2931-2937. |
| 8 | Ma J, Tian Z, Li Y, et al. Vehicle tracking method in polar coordinate system based on radar and monocular camera[C]∥ 2020 Chinese Control and Decision Conference(CCDC), Hefei, 2020: 93-98. |
| 9 | Huang C, Wu X. Cooperative vehicle tracking using particle filter integrated with interacting multiple models[C]∥ 2019 IEEE International Conference on Communications, Shanghai, 2019: No.18866635. |
| 10 | Liu H, Li N, Guan D, et al. Data feature analysis of non-scanning multi target millimeter-wave radar in traffic flow detection applications[J]. Sensors, 2018, 18: 2756-2775. |
| 11 | Belgiovane D, Chen C, Ming C, et al. 77 GHz radar scattering properties of pedestrians[C]∥ 2014 IEEE Radar Conference, Cincinnati, 2014: 735-738. |
| 12 | Han X, Armenakis C, Jadidi M. DBSCAN optimization for improving marine trajectory clustering and anomaly detection[J]. The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2020, 43: 455-461. |
| 13 | Jian L, Yu W, Yan B. Memory effect in DBSCAN algorithm[C]∥ 2009 4th International Conference on Computer Science & Education, Nanning, 2009: 31-36. |
| 14 | Guo L, Ge P, He D, et al. Multi-vehicle detection and tracking based on Kalman filter and data association[C]∥ International Conference on Intelligent Robotics and Applications, Shenyang, 2019: 439-449. |
| 15 | Shi K, Shi Z, Yang C, et al. Road-map aided GM-PHD filter for multivehicle tracking with automotive radar[J]. IEEE Transactions on Industrial Informatics, 2022, 18(1): 97-108. |
| 16 | Liu H, Zhang H, Mertz C. DeepDA: LSTM-based deep data association network for multi-targets tracking in clutter[C]∥ The 22nd International Conference on Information Fusion, Ottawa, 2019: No.19411161. |
| 17 | Guo F H, Xu Y. Vehicle analysis system based on DeepSORT and YOLOv5[C]∥ 2022 3rd International Conference on Computer Vision, Image and Deep Learning & International Conference on Computer Engineering and Applications (CVIDL & ICCEA), Changchun, 2022: 175-179. |
| [1] | 樊学平,刘月飞. 基于改进高斯混合粒子滤波新算法的桥梁极值应力动态预测[J]. 吉林大学学报(工学版), 2024, 54(4): 1038-1044. |
| [2] | 杨秀建,贾晓寒,张生斌. 考虑汽车队列动态特性的混合交通流特性[J]. 吉林大学学报(工学版), 2024, 54(4): 947-958. |
| [3] | 张海龙,张萌,张亚州,王杰,冶鑫晨,王万琼,李嘉,杜旭,张婷. 基于临界采样多相滤波器组的宽带信号信道化[J]. 吉林大学学报(工学版), 2023, 53(8): 2388-2394. |
| [4] | 王小艺,刘迪一,于家斌,何卓昀,赵峙尧. 复杂风场环境下的多旋翼无人机编队故障检测方法[J]. 吉林大学学报(工学版), 2023, 53(3): 823-831. |
| [5] | 樊敏,宋世军. 基于多源大数据分析的图像特征智能识别模型[J]. 吉林大学学报(工学版), 2023, 53(2): 555-561. |
| [6] | 高海龙,徐一博,侯德藻,王雪松. 基于深度异步残差网络的路网短时交通流预测算法[J]. 吉林大学学报(工学版), 2023, 53(12): 3458-3464. |
| [7] | 马为駽,张䶮,马传香,朱飒. 不同光照条件下含噪遥感图像边缘检测算法[J]. 吉林大学学报(工学版), 2023, 53(1): 241-247. |
| [8] | 刘洲洲,孙传新,王晓柱,张杨梅. 采用VGG19和低通滤波的红外与微光图像融合方法[J]. 吉林大学学报(工学版), 2023, 53(1): 255-262. |
| [9] | 马彦,郭则宣. 基于改进BPNN⁃MPF算法的锂离子电池SoE估计[J]. 吉林大学学报(工学版), 2023, 53(1): 263-272. |
| [10] | 马永杰,陈敏. 基于卡尔曼滤波预测策略的动态多目标优化算法[J]. 吉林大学学报(工学版), 2022, 52(6): 1442-1458. |
| [11] | 高明华,杨璨. 基于改进卷积神经网络的交通目标检测方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1353-1361. |
| [12] | 李向军,涂洁莹,赵志宾. 基于多尺度融合卷积神经网络的熔解曲线有效性分类[J]. 吉林大学学报(工学版), 2022, 52(3): 633-639. |
| [13] | 李茂月,刘硕,田帅,肖桂风. 薄壁件铣削加工颤振的图像特征提取与识别[J]. 吉林大学学报(工学版), 2022, 52(2): 425-432. |
| [14] | 张友俊,程顺延. 基于卷积神经网络的微带滤波器结构参数估计[J]. 吉林大学学报(工学版), 2022, 52(12): 3022-3028. |
| [15] | 李文航,倪涛,赵丁选,张泮虹,师小波. 基于集合卡尔曼滤波的高机动救援车辆主动悬挂控制方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2816-2826. |
|
||