吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (3): 839-845.doi: 10.13229/j.cnki.jdxbgxb.20240146
基于白鲨优化算法的压力机械手爪吸附力均衡性控制
闫向彤( ),杨若冰
),杨若冰
- 西安科技大学 机械工程学院,西安 710054
Equilibrium control of adsorption force of pressure mechanical claw based on white shark optimization algorithm
Xiang-tong YAN(),Ruo-bing YANG
- School of Mechanical Engineering,Xi'an University of Science and Technology,Xi'an 710054,China
摘要:
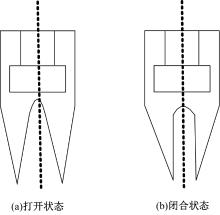
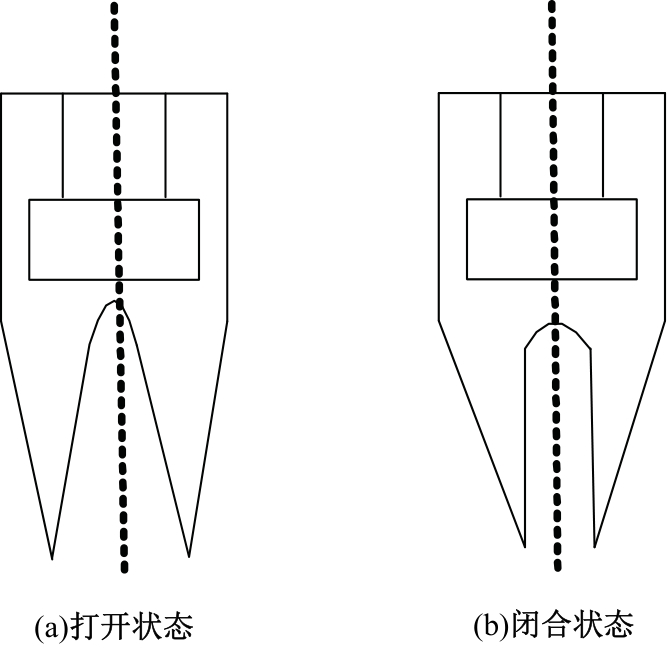
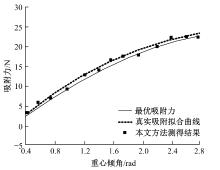
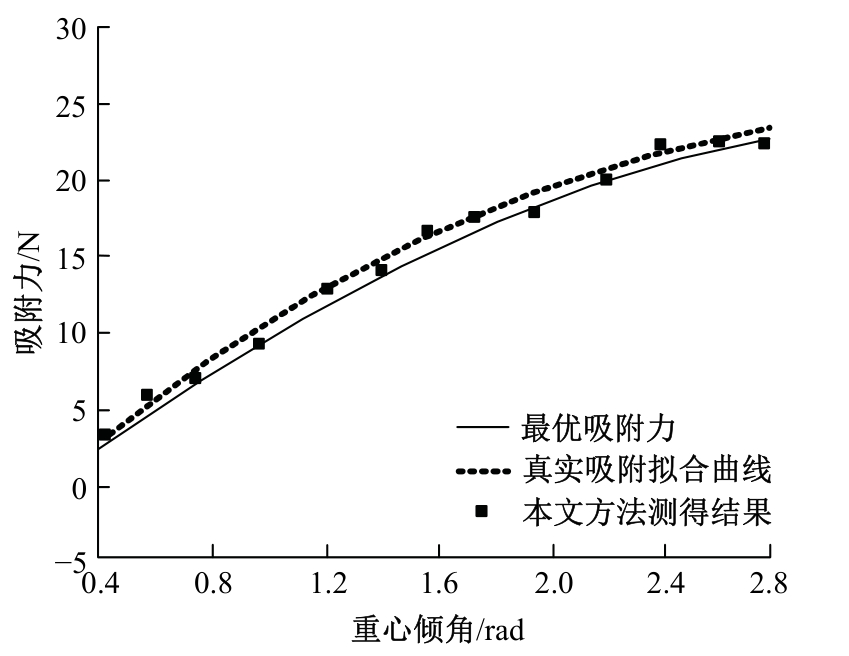
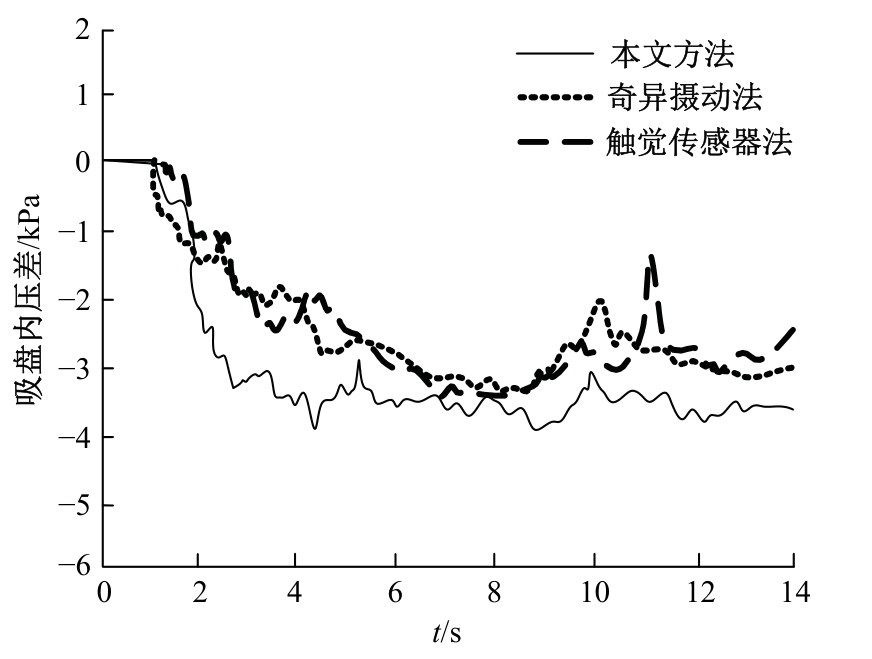
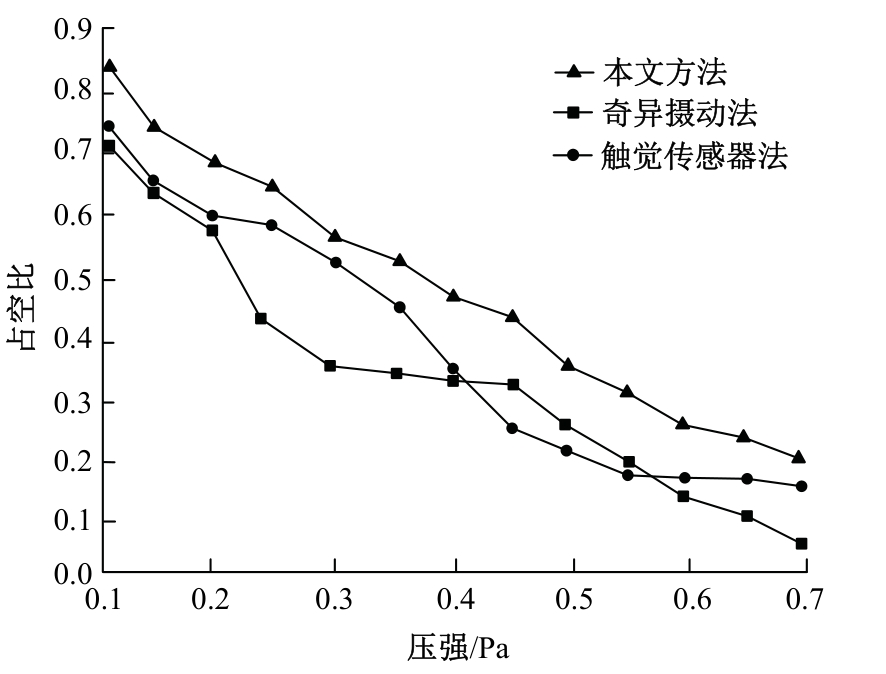
为了提高机械手爪的灵活性,提出了一种基于白鲨优化算法的压力机械手爪吸附力均衡性控制方法。划分压力机械手爪结构,计算手爪内部空腔轴向应力和形变,明确机械手爪与物体间的作用机理。以机械手爪吸附状态和释放状态为前提,充分考虑振动、气流等外界影响,调整吸附目标与吸头间的正压力,输出吸附力均衡性控制模型。引入白鲨优化算法,通过初始化、位置更新和最优定位求解模型最佳参数,达到预期吸附力均衡控制目标。实验分析结果证明:本文方法在机械手爪不同角度下,吸附力曲线与最优吸附力曲线基本一致,控制在3~5 N,3 s即可实现稳定控制,在压强为0.7 Pa时占空比依然高于0.2,说明本文方法可有效提升手爪物体吸附的平稳性和准确性,实现了高质量手爪吸附力自适应调节。
中图分类号:
- TP302

| 1 | 刘静, 周凤星. 未知环境下机器人受限机械手PLC阻抗控制系统[J]. 机械设计与制造, 2022(5):115-118. |
| Liu Jing, Zhou Feng-xing. PLC impedance control system of robot limited manipulator in unknown environment[J].Machinery Design & Manufacture,2022(5): 115-118. | |
| 2 | 杨云, 董珍珍. 采摘机器人机械手远程控制系统设计——基于云平台和5G无线通信[J]. 农机化研究, 2022, 44(7): 138-142. |
| Yang Yun, Dong Zhen-zhen.Design of remote control system of picking robot manipulator based on cloud platform and 5G wireless communication[J].Journal of Agricultural Mechanization Research,2022,44(7): 138-142. | |
| 3 | 陈静, 赵晶. 结合PID与状态观测器的欠驱动机械手末端控制[J].计算机仿真, 2021, 38(10): 367-371, 378. |
| Chen Jing, Zhao Jing. Terminal control of underactuated manipulator based on PID and state observer[J].Computer Simulation, 2021, 38(10): 367-371, 378. | |
| 4 | 宋相兵, 季玉龙, 俎文强, 等. 基于触觉传感器和强化学习内在奖励的机械臂抓取方法[J]. 四川大学学报: 自然科学版, 2022, 59(3): 59-68. |
| Song Xiang-bing, Ji Yu-long, Zu Wen-qiang, et al. The method for manipulator grasping based on tactile sensor and reinforcement learning intrinsic reward[J].Journal of Sichuan University (Natural Science Edition), 2022, 59(3): 59-68. | |
| 5 | 欧劲松, 李蓉, 尹辉, 等.基于奇异摄动的柔性关节机械臂约束跟随控制研究[J]. 应用数学和力学, 2023, 44(5): 513-524. |
| Jing-song Ou, Li Rong, Yin Hui, et al. Research on constraint following control of flexible joint manipulators based on singular perturbation[J].Applied Mathematics and Mechanics, 2023, 44(5): 513-524. | |
| 6 | Fazli E, Rakhtala S M, Mirrashid N,et al.Real-time implementation of a super twisting control algorithm for an upper limb wearable robot[J].Mechatronics, 2022, 84: No.102808. |
| 7 | Liu C, Zhang X, Wu R,et al.Mechanical design and wheel-leg-body cooperation control of a step-climbing robot[J].Journal of Field Robotics, 2022,39(7):1054-1068. |
| 8 | Yu X, Zhao J, Li X.Optimization of mechanical performance of a Bernoulli gripper based on the force characteristic curve synthesis method[J].Industrial Robot, 2022, 49(6): 1169-1177. |
| 9 | Chen C, Sun J, Wang L,et al.Pneumatic bionic hand with rigid-flexible coupling structure[J].Materials, 2022, 15(4): 1358-1358. |
| 10 | 张雨峰, 王琨, 吴晅, 等.仿舌表面结构的机械手爪设计与试验[J]. 机械设计与研究, 2022, 38(3): 70-74. |
| Zhang Yu-feng, Wang Kun, Wu Xuan, et al. Design and experiment of a gripper with tongue-inspired surface structure[J].Machine Design & Research,2022,38(3): 70-74. | |
| 11 | 姬昭鑫, 陶友瑞, 吴淼杰. 风电塔筒爬壁机器人吸附结构优化设计及试验研究[J]. 现代制造工程, 2023(1): 35-42, 49. |
| Ji Zhao-xin, Tao You-rui, Wu Miao-jie. Optimization design and experimental research on adsorption structure of wind power tower wall climbing robot[J].Modern Manufacturing Engineering,2023(1):35-42, 49. | |
| 12 | Hwang G, Park J, Cortes D S D,et al.Electroadhesion-based high-payload soft gripper with mechanically strengthened structure[J].IEEE Transactions on Industrial Electronics, 2022, 69(1): 642-651. |
| 13 | Rhee I, Kang G, Moon S J,et al. Hybrid impedance and admittance control of robot manipulator with unknown environment[J].Intelligent Service Robotics, 2023, 16(1): 49-60. |
| 14 | 张赫, 李海铭, 张佳闪, 等.面向腔镜微创手术的连续体机械手关键技术与研究进展[J]. 机械工程学报, 2023, 59(19): 44-64. |
| Zhang He, Li Hai-ming, Zhang Jia-shan, et al.Key technologies and research progress of continuum manipulators for minimally invasive laparoscopic surgery[J]. Journal of Mechanical Engineering, 2023, 59(19):44-64. | |
| 15 | Liang P, Gao X, Gao R,et al. Analysis of the aerodynamic performance of a twin-propelled wall-climbing robot based on computational fluid dynamics method[J].AIP Advances, 2022, 12(1): No.015022. |
| 16 | 张延恒, 宋子辉, 褚明. 用于康复训练的柔性机械手设计与实现[J]. 华中科技大学学报: 自然科学版,2023, 51(6): 36-40, 55. |
| Zhang Yan-heng, Song Zi-hui, Chu Ming.Design and realization of flexible hand for rehabilitation[J].Journal of Huazhong University of Science and Technology(Natural Science Edition),2023, 51(6): 36-40, 55. | |
| 17 | Jalendra C, Rout B K, Marathe A.Vision sensor based residual vibration suppression strategy of non-deformable object for robot-assisted assembly operation with gripper flexibility[J].Industrial Robot, 2022, 49:851-864. |
| 18 | 马金茹, 高文华, 祁宇明. 一种自适应扰动观测器的机械手滑模控制研究[J]. 机床与液压, 2022, 50(3): 54-60. |
| Ma Jin-ru, Gao Wen-hua, Qi Yu-ming.Research on sliding mode control of manipulator based on adaptive disturbance observer[J]. Machine Tool & Hydraulics,2022, 50(3): 54-60. |
| [1] | 丛茜,徐金,史孝杰,金敬福,陈廷坤. 仿生凹坑型吸盘设计与试验[J]. 吉林大学学报(工学版), 2024, 54(4): 1144-1152. |
|
||