吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (5): 1661-1667.doi: 10.13229/j.cnki.jdxbgxb20180642
• • 上一篇
基于深度学习的行人和车辆检测
徐谦1,2( ),李颖1,2,王刚1,2()
),李颖1,2,王刚1,2()
- 1. 吉林大学 计算机科学与技术学院,长春 130012
2. 吉林大学 符号计算与知识工程教育部重点实验室,长春 130012
Pedestrian-vehicle detection based on deep learning
Qian XU1,2(),Ying LI1,2,Gang WANG1,2()
- 1. College of Computer Science and Technology, Jilin University, Changchun 130012, China
2. Key Laboratory of Symbolic Computation and Knowledge Engineering of Ministry of Education, Jilin University, Changchun 130012, China
摘要:
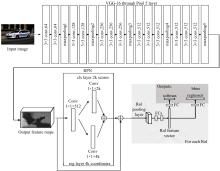
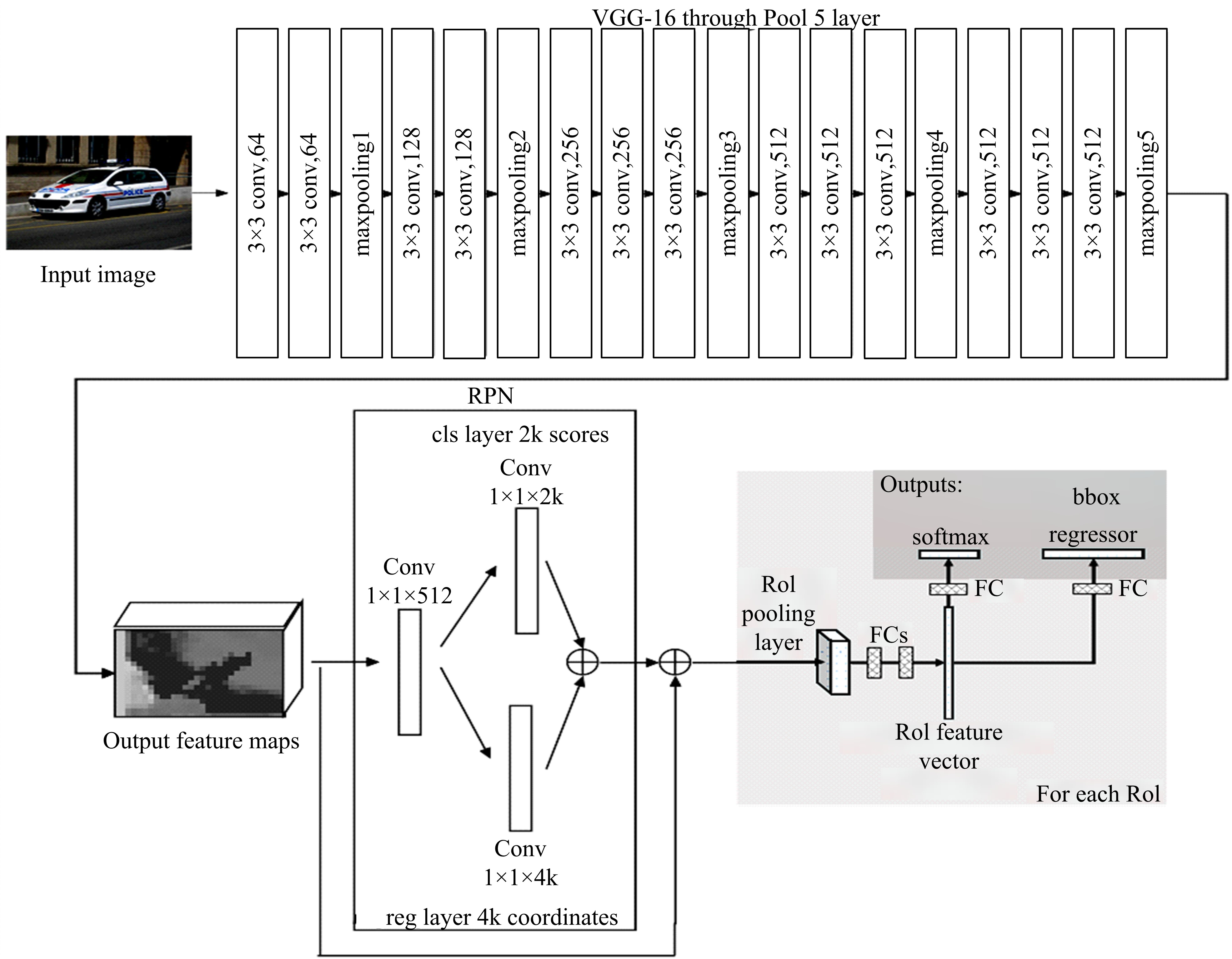
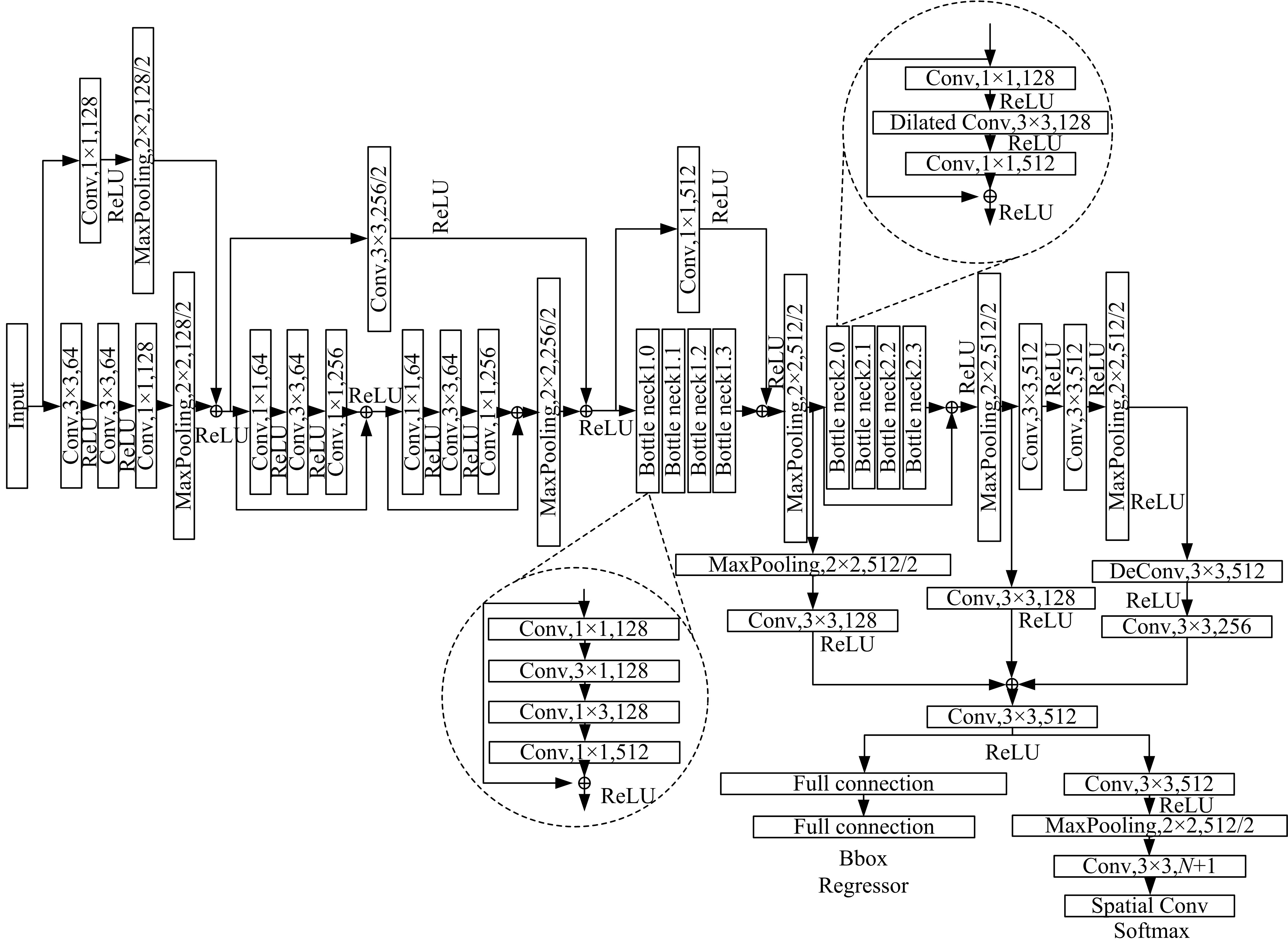
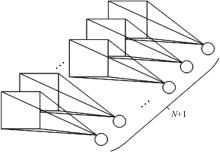
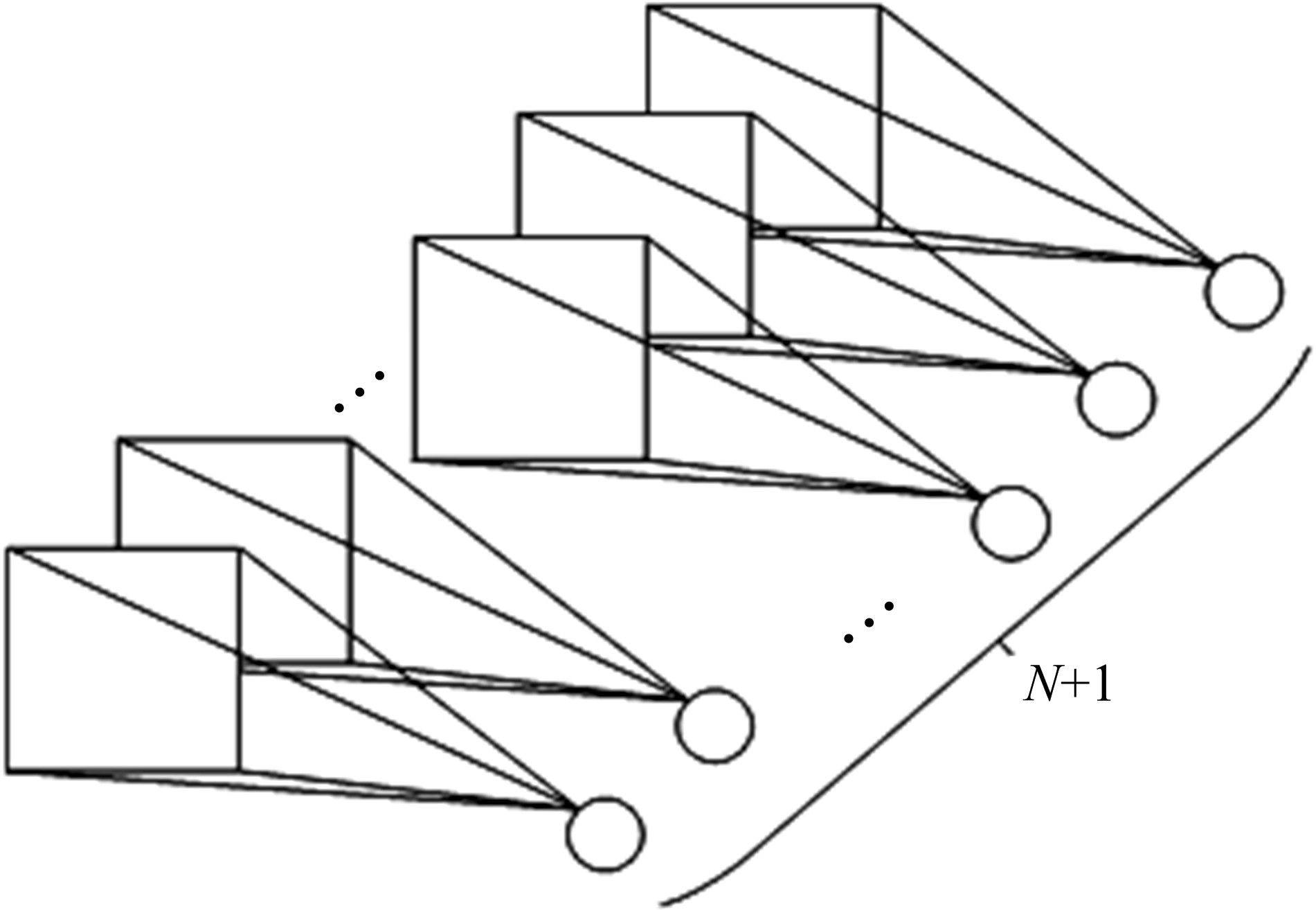
为解决自动驾驶行车环境目标检测的问题,提出了一种基于深度学习的行人和车辆检测网络PVDNet。在网络底层,改进了跳跃连接结构,提出多级跳跃连接MLSC,加速了模型的收敛速度和收敛精度;在网络顶层,设计了一种多层特征融合方法MLFF,将底层特征与顶层特征融合以提高检测精度;在网络输出层,提出了一种单维卷积方法ODC替代全连接层,减少了模型参数以提高检测速度。实验表明:与原始的Faster R-CNN相比,PVDNet在数据集PascalVOC2007、PascalVOC2012、MS COCO、KITTI上行人和车辆平均检测准确率分别提高了3.7%、6.1%、5.6%、9.62%。
中图分类号:
- TP301.6



| 1 | 曲昭伟, 魏福禄, 魏巍, 等 . 雷达与视觉信息融合的行人检测方法[J]. 吉林大学学报: 工学版, 2013, 43(5): 1230-1234. |
| Qu Zhao-wei , Wei Fu-lu , Wei Wei , et al . Pedestrian detection by radar vision data fusion[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(5): 1230-1234. | |
| 2 | Park K , Kim S , Sohn K . Unified multi-spectral pedestrian detection based on probabilistic fusion networks[J]. Pattern Recognition, 2018, 80: 143-155. |
| 3 | Zhang X W , Cheng L , Li B , et al . Too far to see? not really!—pedestrian detection with scale-aware localization policy[J]. IEEE Transactions on Image Processing, 2017, 27(8): 3703-3715. |
| 4 | 李琳辉, 伦智梅, 连静, 等 . 基于卷积神经网络的道路车辆检测方法[J]. 吉林大学学报: 工学版, 2017, 47(2): 384-391. |
| Li Lin-hui , Zhi-mei Lun , Lian Jing , et al . Convolution neural network-based vehicle detection method[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(2): 384-391. | |
| 5 | Karaimer H C , Baris I , Bastanlar Y . Detection and classification of vehicles from omnidirectional videos using multiple silhouettes[J]. Pattern Analysis and Applications, 2017, 20(3): 893-905. |
| 6 | Ershadi N Y , Menendez J M , Jimenez D . Robust vehicle detection in different weather conditions: using MIPM[J/OL]. [2018-06-19]. https:⫽journals.plos.org/plosone/article?id=10.1371/journal.pone.0191355 |
| 7 | Girshick R , Donahue J , Darrell T , et al . Region based convolutional networks for accurate object detection and segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 38(1): 142-158. |
| 8 | He K , Zhang X , Ren S , et al . Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 37(9): 1904-1916. |
| 9 | Girshick R . Fast R-CNN[C]⫽International Conference on Computer Vision, Santiago, Chile, 2015: 1440-1448. |
| 10 | Ren S Q , He K M , Girshick R , et al . Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 11 | Redmon J , Divvala S , Girshick R , et al . You only look once: unified, real-time object detection[C]⫽IEEE Computer Vision and Pattern Recognition, Las Vegas, Nevada, 2016: 779-788. |
| 12 | Liu W , Anguelov D , Erhan D , et al . SSD: single shot multibox detector[C]⫽European Conference on Computer Vision, Amsterdam, The Netherlands, 2016: 21-37. |
| 13 | Shelhamer E , Long J , Darrell T . Fully convolutional networks for semantic segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(4): 640-651. |
| 14 | Liu W , Anguelov D , Erhan D , et al . SSD: single shot multibox detector[EB/OL]. [2018-09-11]. https:⫽github.com/weiliu89/caffe/tree/ssd |
| 15 | Ren S Q , He K M , Girshick R , et al . Faster R-CNN (python implementation)[EB/OL]. [2018-09-11]. https:⫽github.com/rbgirshick/pyfaster-rcnn |
| 16 | Redmon J , Divvala S , Girshick R , et al . YOLO: real-time object detection[EB/OL]. [2018-09-11]. https:⫽pjreddie.com/darknet/yolo/ |
| [1] | 杨顺,蒋渊德,吴坚,刘海贞. 基于多类型传感数据的自动驾驶深度强化学习方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1026-1033. |
| [2] | 高万夫,张平,胡亮. 基于已选特征动态变化的非线性特征选择方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1293-1300. |
| [3] | 郭立民,陈鑫,陈涛. 基于AlexNet模型的雷达信号调制类型识别[J]. 吉林大学学报(工学版), 2019, 49(3): 1000-1008. |
| [4] | 欧阳丹彤,肖君,叶育鑫. 基于实体对弱约束的远监督关系抽取[J]. 吉林大学学报(工学版), 2019, 49(3): 912-919. |
| [5] | 黄勇,杨德运,乔赛,慕振国. 高分辨合成孔径雷达图像的耦合传统恒虚警目标检测[J]. 吉林大学学报(工学版), 2018, 48(6): 1904-1909. |
| [6] | 顾海军, 田雅倩, 崔莹. 基于行为语言的智能交互代理[J]. 吉林大学学报(工学版), 2018, 48(5): 1578-1585. |
| [7] | 董飒, 刘大有, 欧阳若川, 朱允刚, 李丽娜. 引入二阶马尔可夫假设的逻辑回归异质性网络分类方法[J]. 吉林大学学报(工学版), 2018, 48(5): 1571-1577. |
| [8] | 王旭, 欧阳继红, 陈桂芬. 基于垂直维序列动态时间规整方法的图相似度度量[J]. 吉林大学学报(工学版), 2018, 48(4): 1199-1205. |
| [9] | 张浩, 占萌苹, 郭刘香, 李誌, 刘元宁, 张春鹤, 常浩武, 王志强. 基于高通量数据的人体外源性植物miRNA跨界调控建模[J]. 吉林大学学报(工学版), 2018, 48(4): 1206-1213. |
| [10] | 李雄飞, 冯婷婷, 骆实, 张小利. 基于递归神经网络的自动作曲算法[J]. 吉林大学学报(工学版), 2018, 48(3): 866-873. |
| [11] | 黄岚, 纪林影, 姚刚, 翟睿峰, 白天. 面向误诊提示的疾病-症状语义网构建[J]. 吉林大学学报(工学版), 2018, 48(3): 859-865. |
| [12] | 刘杰, 张平, 高万夫. 基于条件相关的特征选择方法[J]. 吉林大学学报(工学版), 2018, 48(3): 874-881. |
| [13] | 刘雪娟, 袁家斌, 许娟, 段博佳. 量子k-means算法[J]. 吉林大学学报(工学版), 2018, 48(2): 539-544. |
| [14] | 王旭, 欧阳继红, 陈桂芬. 基于多重序列所有公共子序列的启发式算法度量多图的相似度[J]. 吉林大学学报(工学版), 2018, 48(2): 526-532. |
| [15] | 杨欣, 夏斯军, 刘冬雪, 费树岷, 胡银记. 跟踪-学习-检测框架下改进加速梯度的目标跟踪[J]. 吉林大学学报(工学版), 2018, 48(2): 533-538. |
|
||