吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 810-822.doi: 10.13229/j.cnki.jdxbgxb20220592
• 通信与控制工程 • 上一篇
基于观测器的四旋翼控制-抗扰-避障一体化
齐国元( ),陈浩
),陈浩
- 天津工业大学 天津市电气装备智能控制重点实验室,天津 300387
Observer⁃based control⁃anti⁃disturbance⁃obstacle avoidance of quadrotor unmanned aerial vehicle
Guo-yuan QI(),Hao CHEN
- Tianjin Key Laboratory of Intelligent Control of Electrical Equipment,Tiangong University,Tianjin 300387,China
摘要:
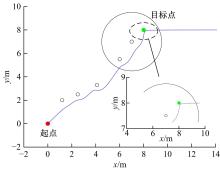
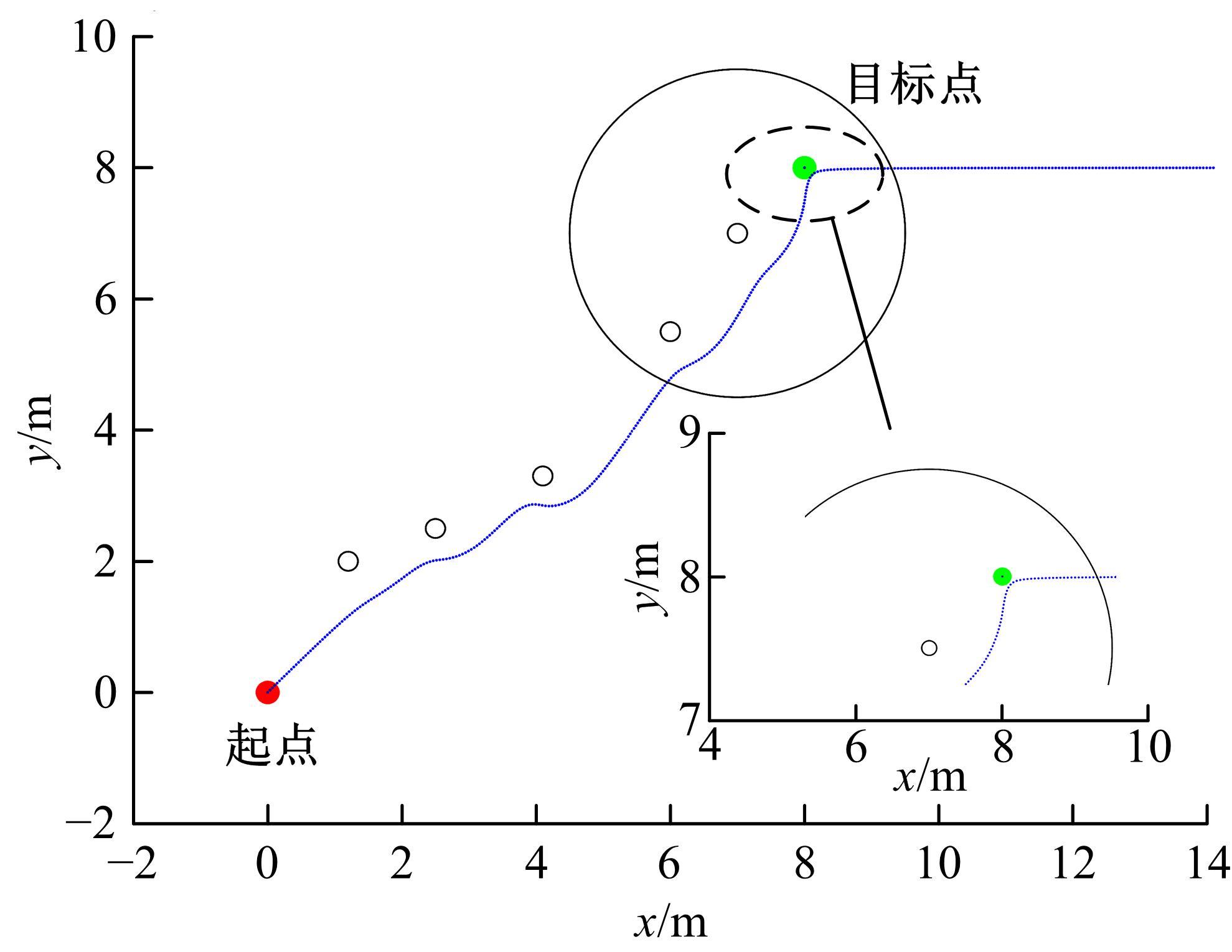
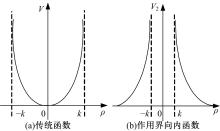
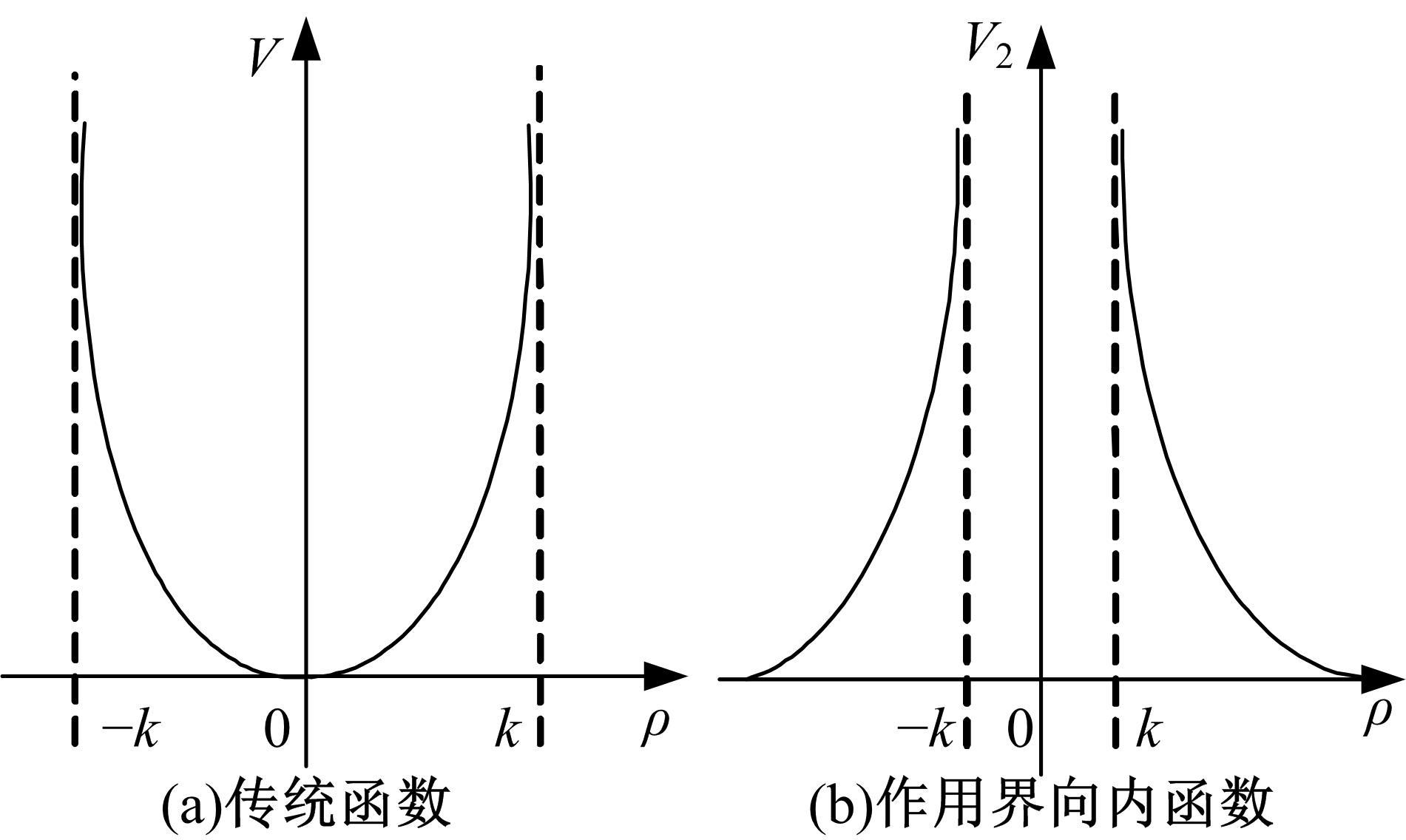
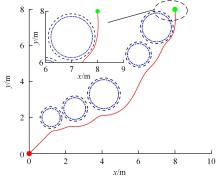
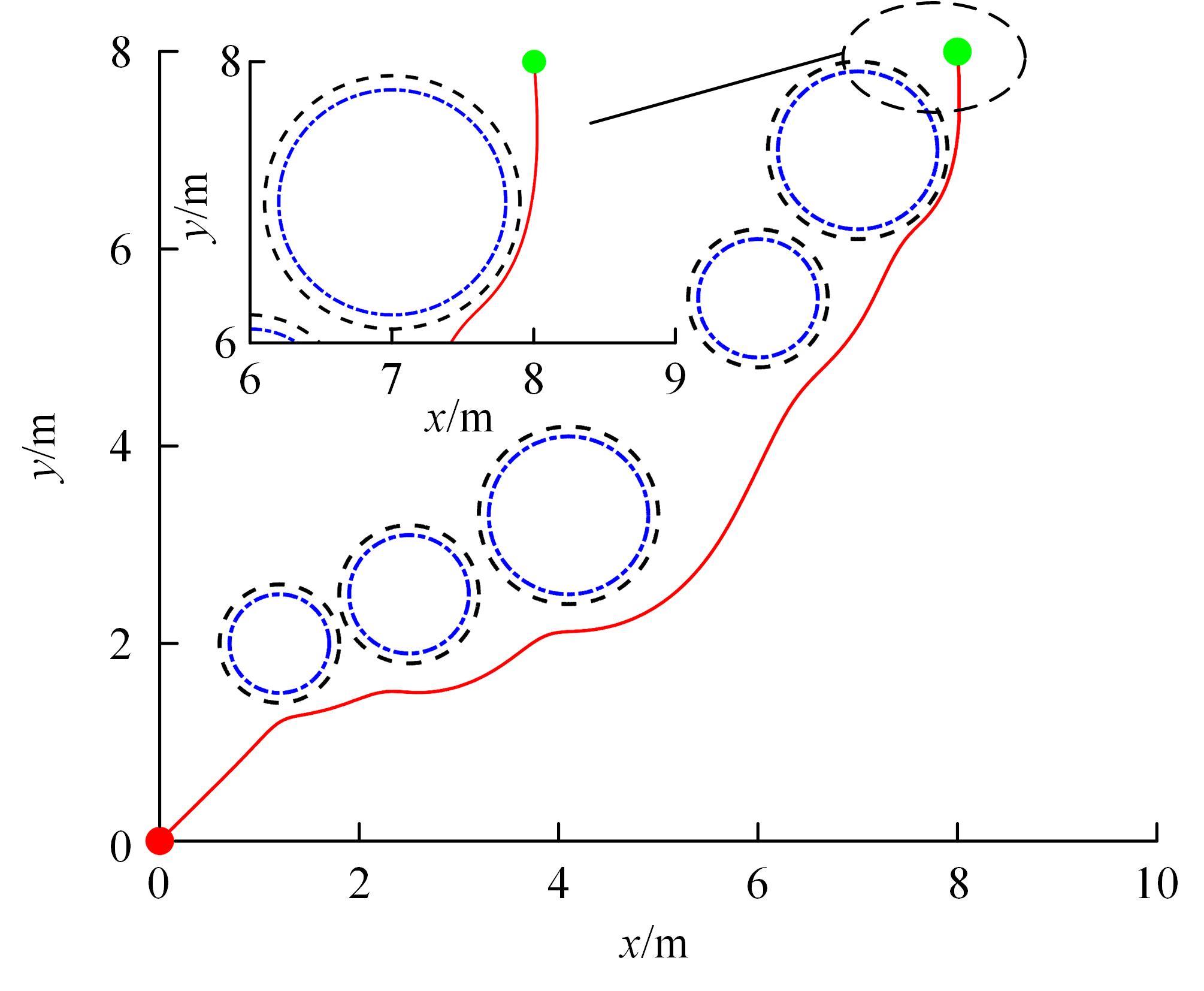
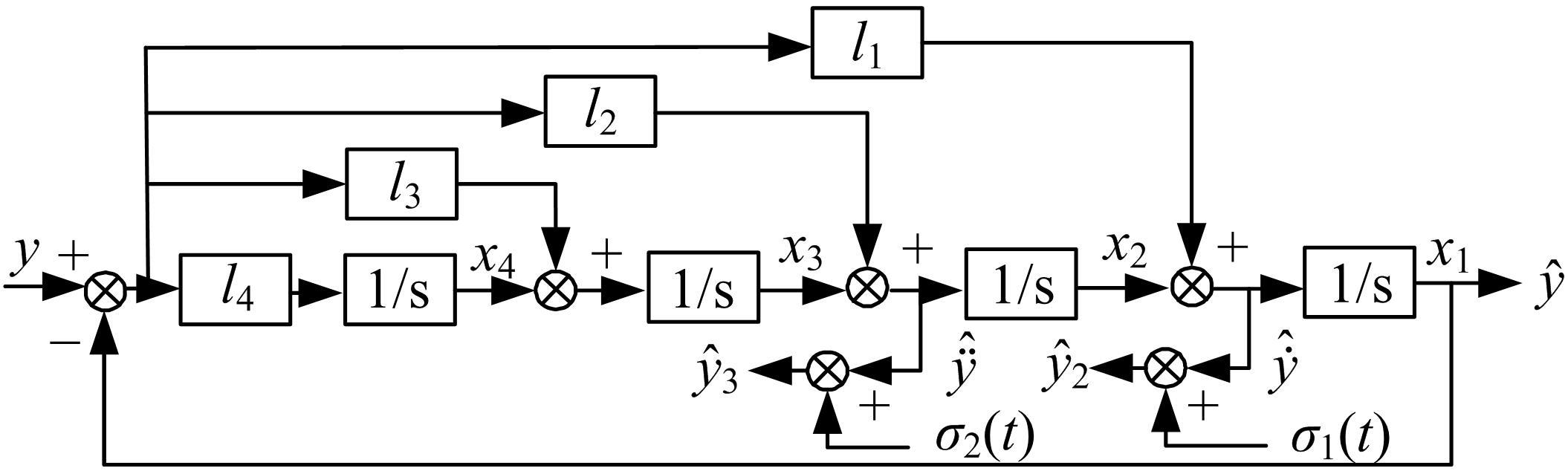
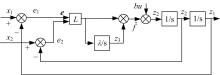
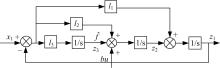
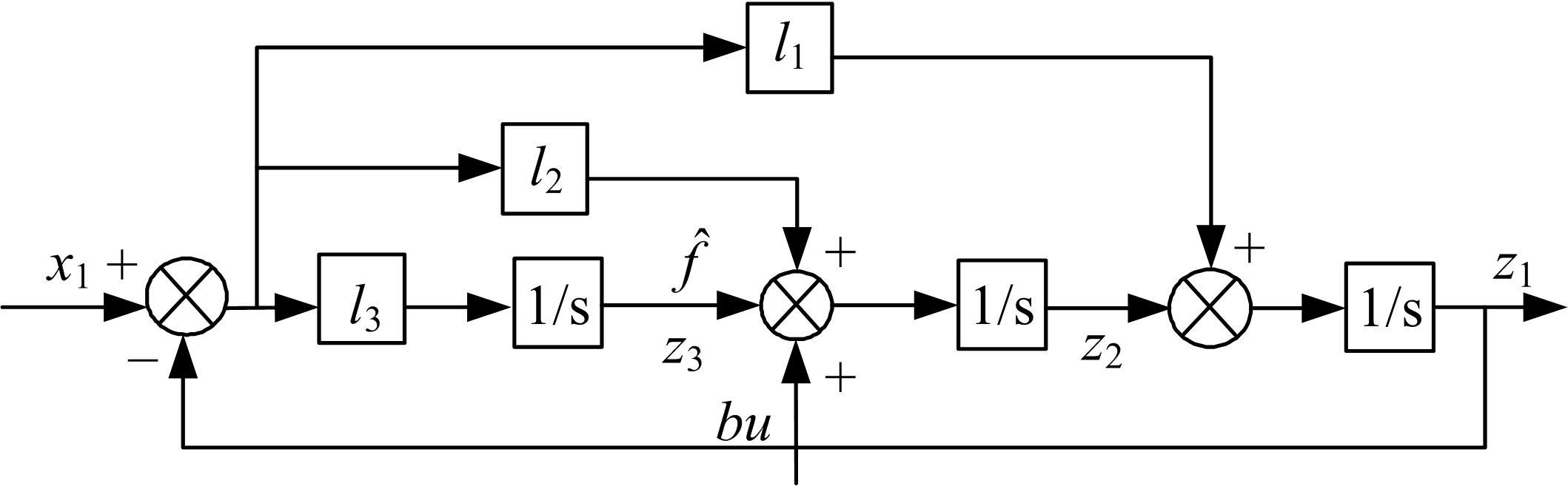
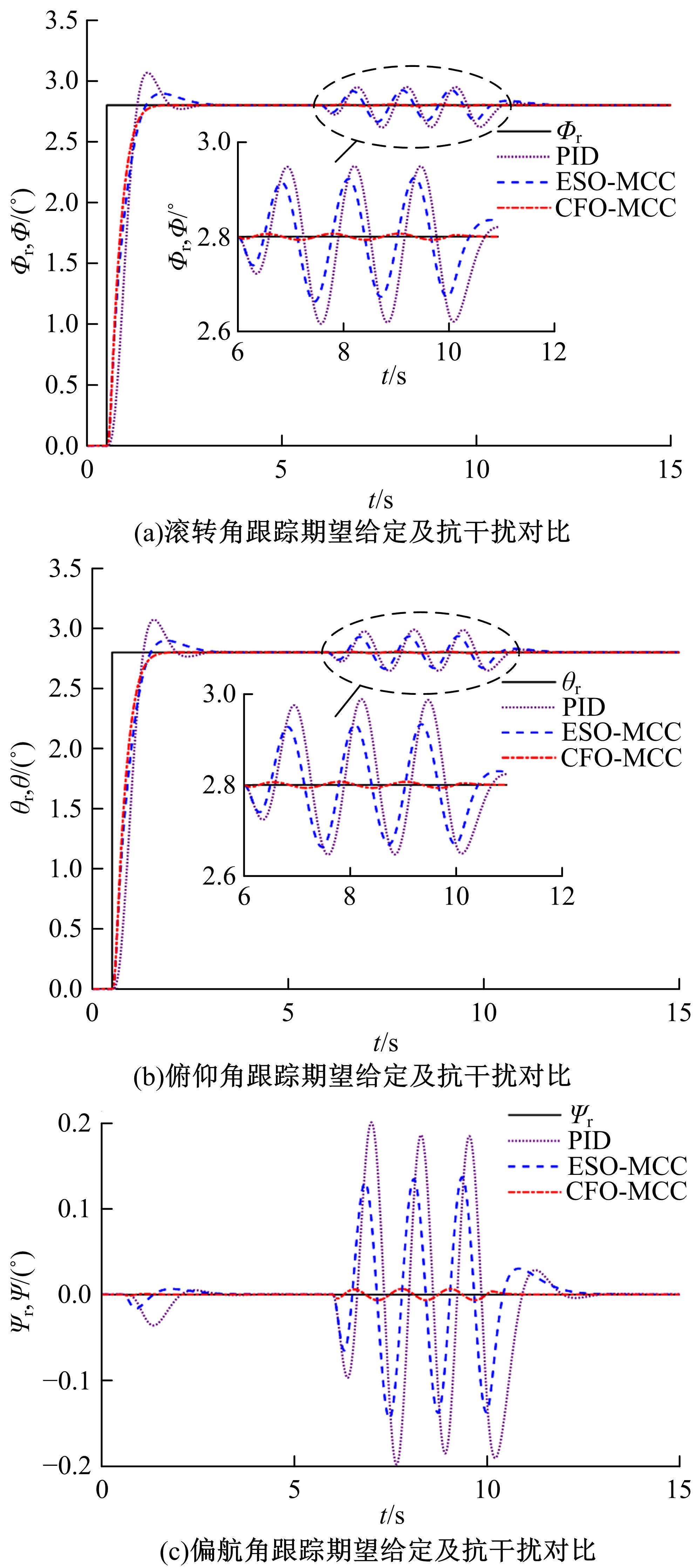
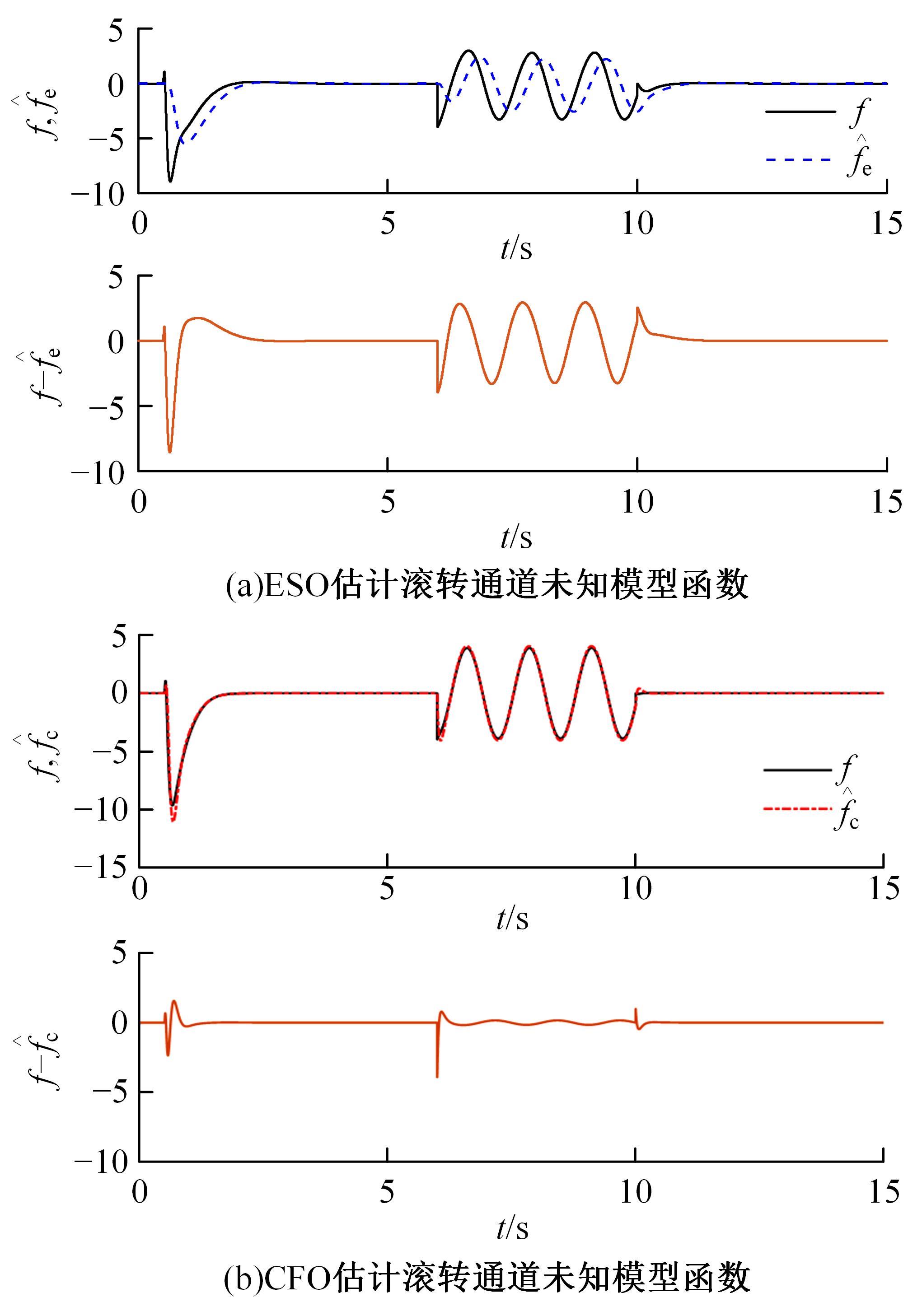
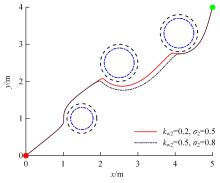
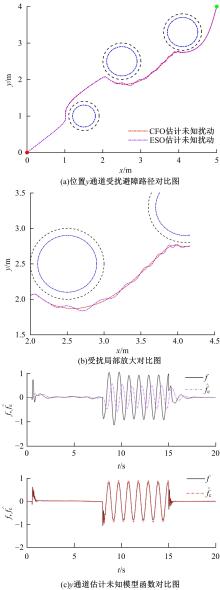
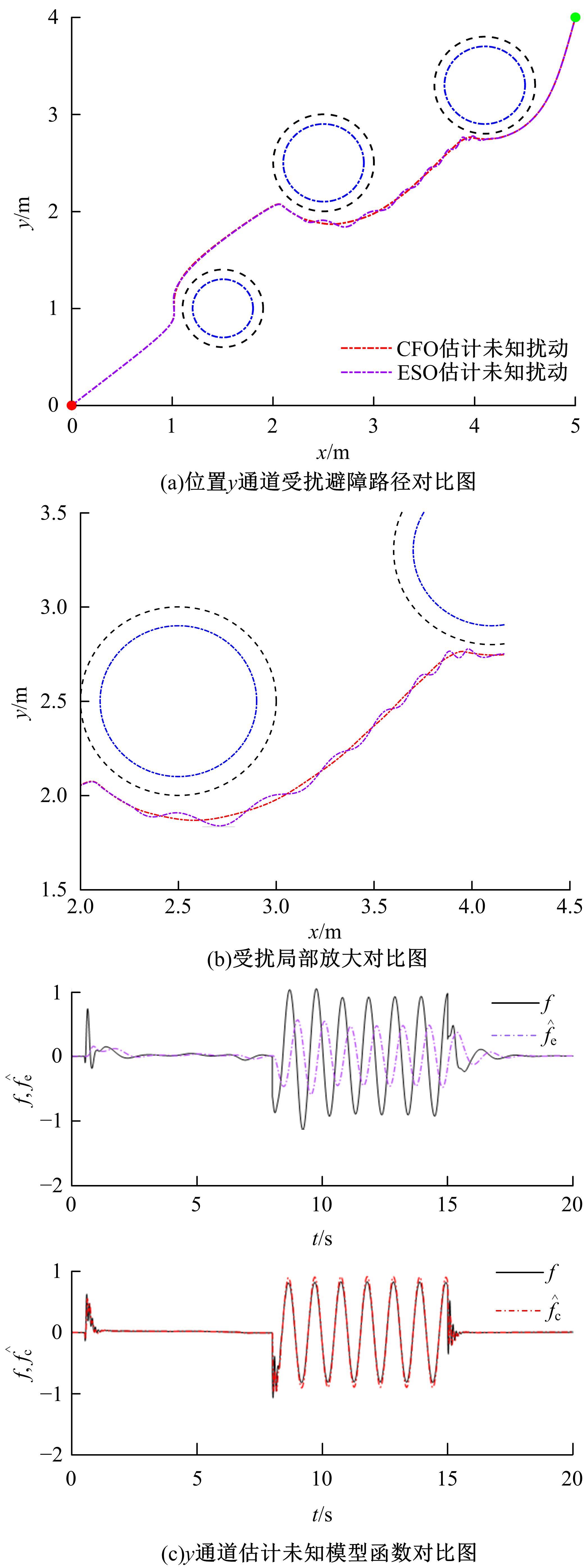
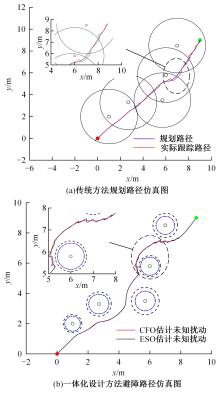
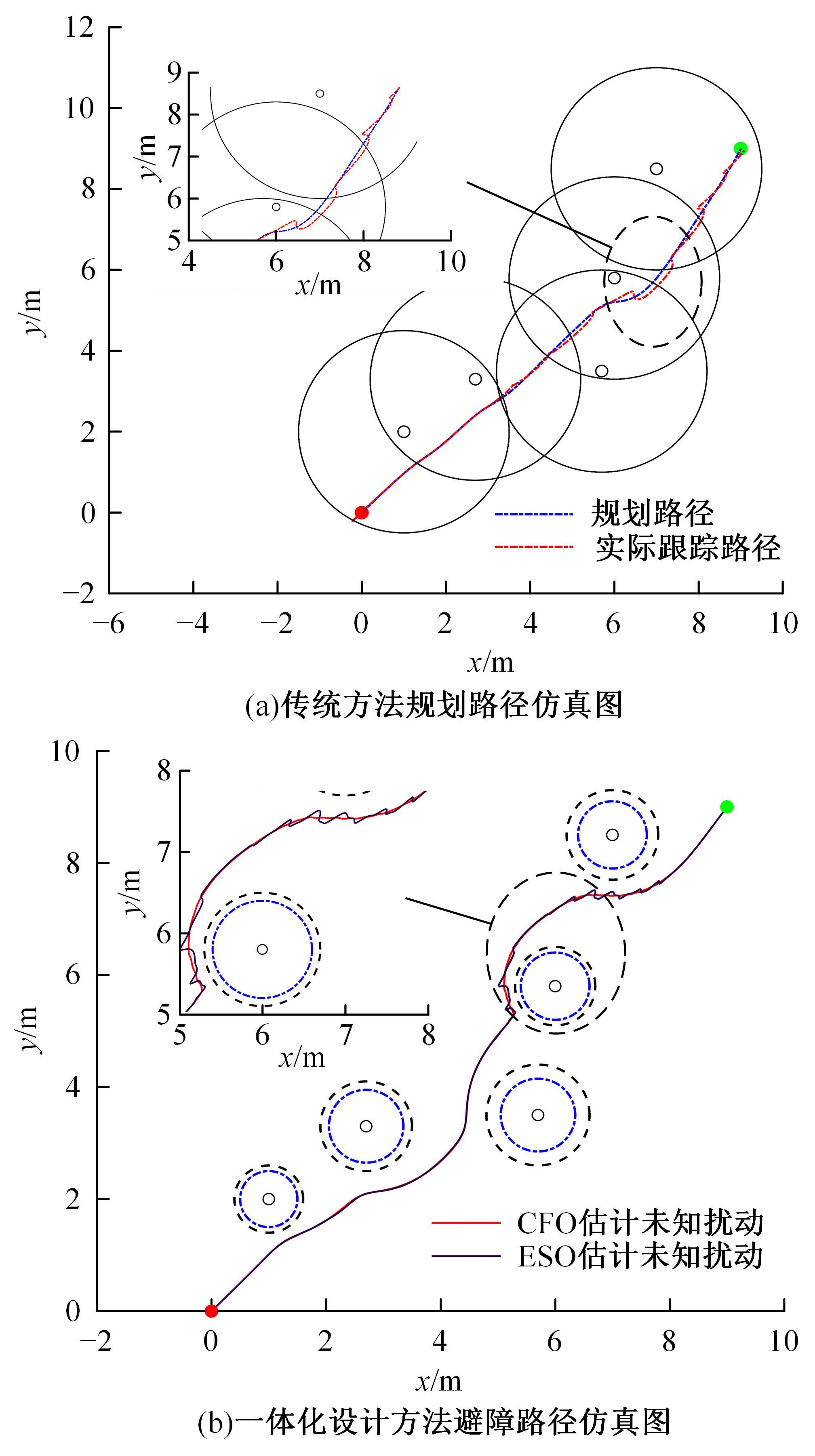
针对四旋翼飞行器“规划-跟踪”避障方法中存在执行器跟踪误差的问题,采用控制-抗扰-避障一体化的设计方案,提出了一种带障碍约束的避障位置控制器。将Barrier李亚普诺夫函数用于约束障碍物边界,通过引入飞行器与目标位置的距离信息使目标点成为平衡点,从而解决传统势场方法中目标不可到达的问题。对于四旋翼控制系统状态强耦合、模型建立不精确的问题,提出了一种基于观测器的模型补偿控制策略并应用于姿态控制。采用补偿函数观测器估计模型偏差及外界扰动,并实时将估计值反馈补偿给控制器以达到自适应抗扰的控制跟踪效果。最后,对上述算法仿真验证,结果表明,基于观测器的模型补偿控制相较于其他控制算法在暂态性能、跟踪期望响应和抗干扰方面有更优的控制效果;避障位置控制器无需考虑跟踪误差问题,在仿真时间角度上,一体化避障方法较传统的“规划-跟踪”避障方法大幅度缩短,通过给定起始、目标位置后可以实现对静态障碍的躲避。
中图分类号:
- V249.12



| 1 | Zhang Y, Chen Z, Zhang X, et al. A novel control scheme for quadrotor UAV based upon active disturbance rejection control[J]. Aerospace Science and Technology, 2018, 79: 601-609. |
| 2 | 吴跃文, 郑柏超, 李惠. 四旋翼无人机的滑模自抗扰姿态控制器设计[J]. 电光与控制, 2022, 29(1): 93-98. |
| Wu Yue-wen, Zheng Bo-chao, Li Hui. Attitude controller for quadrotor via active disturbance rejection control and sliding mode control[J]. Electronics Optics & Control, 2022, 29(1): 93-98. | |
| 3 | 张宏宏, 甘旭升, 毛亿, 等. 无人机避障算法综述[J]. 航空兵器, 2021, 28(5): 53-63. |
| Zhang Hong-hong, Gan Xu-sheng, Mao Yi, et al. Review of UAV obstacle avoidance algorithms[J]. Aero Weaponry, 2021, 28(5): 53-63. | |
| 4 | 吴健发, 王宏伦, 刘一恒, 等. 无人机避障航路规划方法研究综述[J]. 无人系统技术, 2020, 3(1): 1-10. |
| Wu Jian-fa, Wang Hong-lun, Liu Yi-heng, et al. Review on UAV path planning methods for obstacle avoidance[J]. Unmanned Systems Technology, 2020, 3(1): 1-10. | |
| 5 | Duchoň F, Babinec A, Kajan M, et al. Path planning with modified a star algorithm for a mobile robot[J]. Procedia Engineering, 2014, 96: 59-69. |
| 6 | Bakdi A, Hentout A, Boutami H, et al. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control[J]. Robotics and Autonomous Systems, 2017, 89: 95-109. |
| 7 | Das P K, Behera H S, Panigrahi B K. A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning[J]. Swarm and Evolutionary Computation, 2016, 28: 14-28. |
| 8 | Qian K, Liu Y, Tian L, et al. Robot path planning optimization method based on heuristic multi-directional rapidly-exploring tree[J]. Computers & Electrical Engineering, 2020, 85: No. 106688. |
| 9 | Khatib O. Real-time Obstacle Avoidance for Manipulators and Mobile Robots[C]∥1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA 1986: 396-404. |
| 10 | Ge S S, Cui Y J. New potential functions for mobile robot path planning[J]. IEEE Transactions on Robotics and Automation, 2000, 16(5): 615-620. |
| 11 | Cao L, Qiao D, Xu J. Suboptimal artificial potential function sliding mode control for spacecraft rendezvous with obstacle avoidance[J]. Acta Astronautica, 2018, 143: 133-146. |
| 12 | 韦意豪. 四旋翼无人机轨迹跟踪与避障控制研究[D]. 哈尔滨: 哈尔滨工业大学航天学院, 2018. |
| Wei Yi-hao. Rajectory tracking and obstacle avoidance of quadrotor[D]. Harbin: School of Astronautics,Harbin Institute of Technology, 2018. | |
| 13 | Tee K P, Ge S S, Tay E H. Barrier lyapunov functions for the control of output-constrained nonlinear systems[J]. Automatica, 2009, 45(4): 918-927. |
| 14 | 张勇, 陈增强, 张兴会, 等. 基于自抗扰的四旋翼无人机动态面姿态控制[J]. 吉林大学学报:工学版, 2019, 49(2): 562-569. |
| Zhang Yong, Chen Zeng-qiang, Zhang Xing-hui, et al. Dynamic surface attitude control of quad-rotor UAV based on ADRC[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(2): 562-569. | |
| 15 | Zhao Z H, Cao D, Yang J, et al. High-order sliding mode observer-based trajectory tracking control for a quadrotor UAV with uncertain dynamics[J]. Nonlinear Dynamics, 2020, 102(4): 2583-2596. |
| 16 | Han J Q. From PID to active disturbance rejection control[J]. IEEE transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| 17 | Guo B Z, Zhao Z. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems and Control Letters, 2011, 60(6): 420-430. |
| 18 | 陈增强, 程赟, 孙明玮, 等. 线性自抗扰控制理论及工程应用的若干进展[J]. 信息与控制, 2017, 46(3): 257-266. |
| Chen Zeng-qiang, Cheng Yun, Sun Ming-wei, et al. Surveys on theory and engineering applications for linear active disturbance rejection control[J]. Information and Control, 2017, 46(3): 257-266. | |
| 19 | Qi G Y, Li X, Chen Z Q. Problems of extended state observer and proposal of compensation function observer for unknown model and application in UAV[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(5): 2899-2910. |
| 20 | Bi H Y, Qi G Y, Hu J B. Modeling and analysis of chaos and bifurcations for the attitude system of a quadrotor unmanned aerial vehicle[J]. Complexity, 2019, 2019(3): 1-16. |
| 21 | Zhao B, Xian B, Zhang Y, et al. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J]. IEEE Transactions on Industrial Electronics, 2014, 62(5): 2891-2902. |
| 22 | Qi G Y, Ma S L, Guo X T, et al. High-order differential feedback control for quadrotor UAV: theory and experimentation[J]. Electronics, 2020, 9(12): No.2001. |
| 23 | 于慧, 郭宗和, 秦志昌. 基于改进人工势场的智能车动态避障算法[J]. 山东理工大学学报:自然科学版, 2021, 35(4): 56-62. |
| Yu Hui, Guo Zong-he, Qin Zhi-chang. Dynamic obstacle avoidance algorithm of intelligent vehicles based on improved artificial potential field[J]. Journal of Shandong University of Technology (Natural Science Edition), 2021, 35(4): 56-62. | |
| 24 | 李霞, 齐国元, 郭曦彤, 等. 高阶微分反馈控制及在四旋翼飞行器中的应用[J]. 航空学报, 2022, 43(12):434-444. |
| Li Xia, Qi Guo-yuan, Guo Xi-tong, et al. High-order differential feedback control and its application in quadrotor UAV[J]. Acta Aeronautica et Astronautica Sinica,2022, 43(12):434-444. | |
| 25 | Qi G Y, Chen Z Q, Yuan Z Z. Model-free control of affine chaotic systems[J]. Physics Letters A, 2005, 344(2-4): 189-202. |
| 26 | Qi G Y, Chen Z Q, Yuan Z Z. Adaptive high order differential feedback control for affine nonlinear system[J]. Chaos, Solitons and Fractals, 2008, 37(1): 308-315. |
| [1] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [2] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [3] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [4] | 冯建鑫,王强,王雅雷,胥彪. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1990-1996. |
| [5] | 王宏志,王婷婷,胡黄水,鲁晓帆. 基于Q学习优化BP神经网络的BLDCM转速PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2280-2286. |
| [6] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
| [7] | 邓丽飞, 石要武, 朱兰香, 于丁力. SI发动机闭环系统故障检测[J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
| [8] | 祝宏, 张海, 唐高弟, 李中云, 刘以农. 基于信息维数的欺骗干扰存在性检测[J]. 吉林大学学报(工学版), 2016, 46(2): 616-620. |
| [9] | 郑凯,赵宏伟,张孝临,陈鹏 . 基于MotorolaMPC565的混和动力汽车 总成控制器接口设计[J]. 吉林大学学报(工学版), 2008, 38(增刊): 163-0167. |
| [10] | 杨晓萍, 洪伟, 赵梅. 天然气发动机自适应控制软件抗干扰设计[J]. 吉林大学学报(工学版), 2004, (3): 348-351. |
|
||