吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 693-703.doi: 10.13229/j.cnki.jdxbgxb20220897
• 通信与控制工程 • 上一篇
复杂场景智能车辆车道与速度一体化滚动优化决策
郭洪艳1,2( ),于文雅1,2,刘俊1,2(),戴启坤1,2
),于文雅1,2,刘俊1,2(),戴启坤1,2
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
Integrated moving horizon decision⁃making method for lane and speed of intelligent vehicle in complex scenarios
Hong-yan GUO1,2(),Wen-ya YU1,2,Jun LIU1,2(),Qi-kun DAI1,2
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
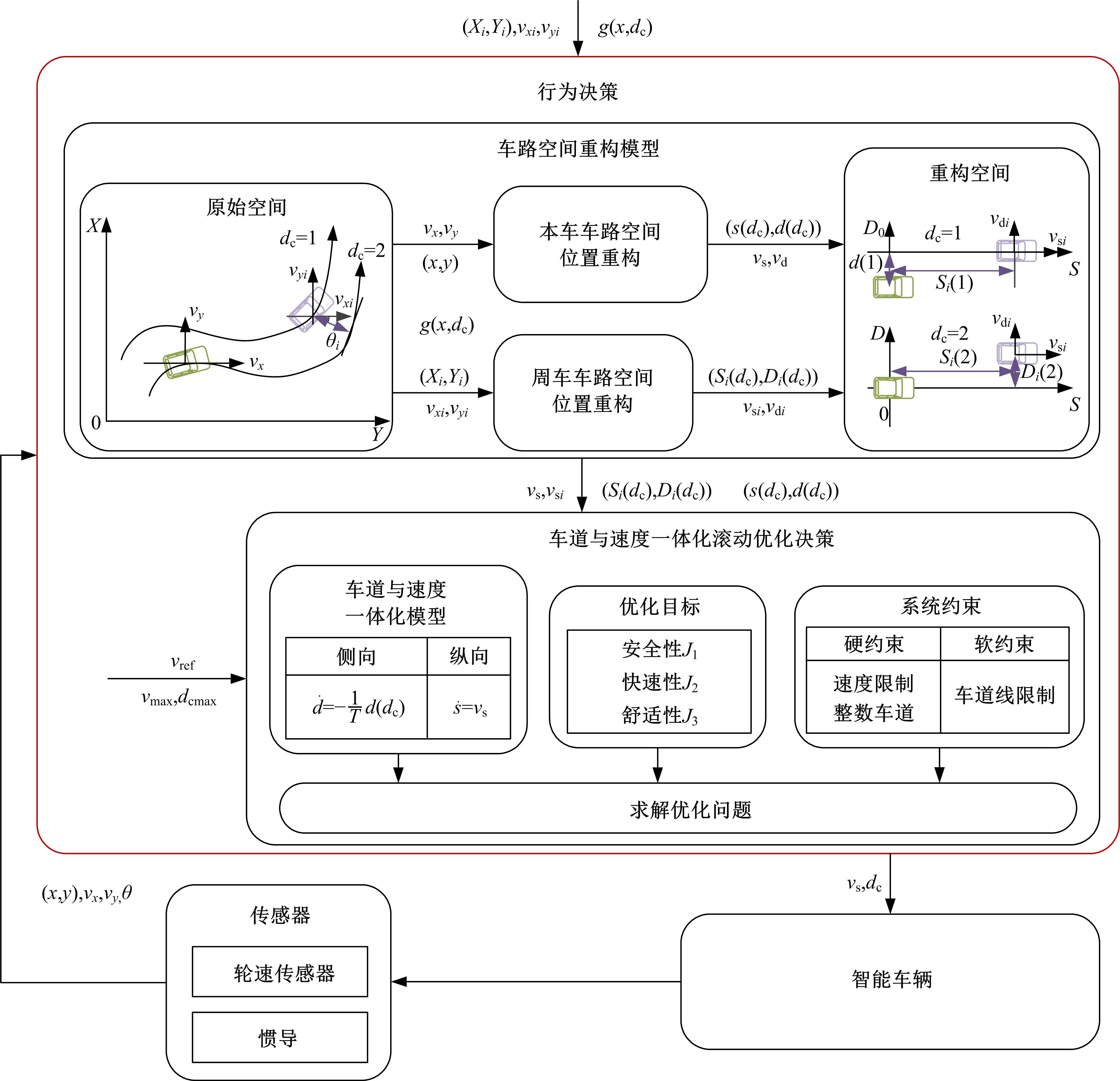
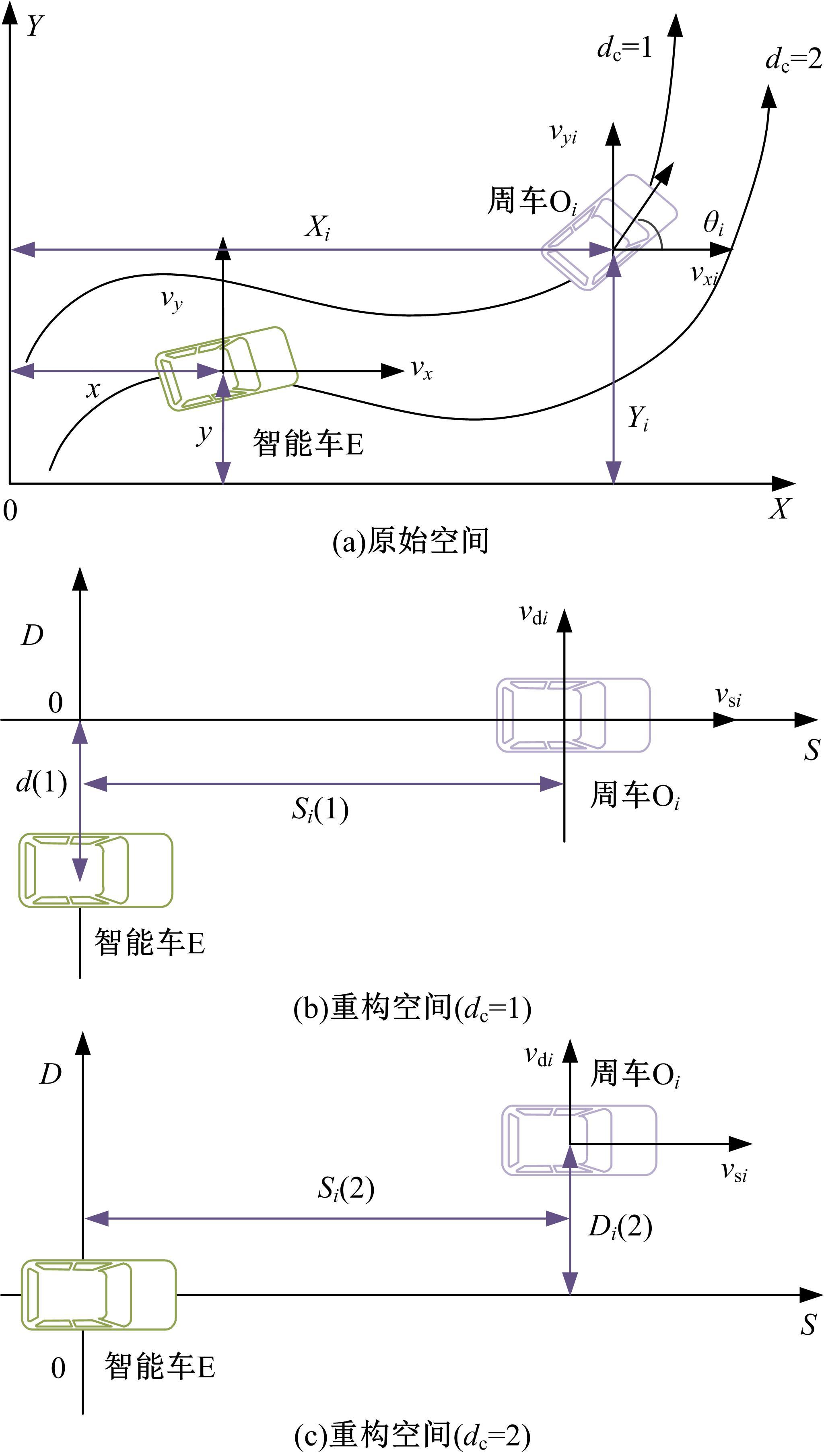
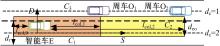
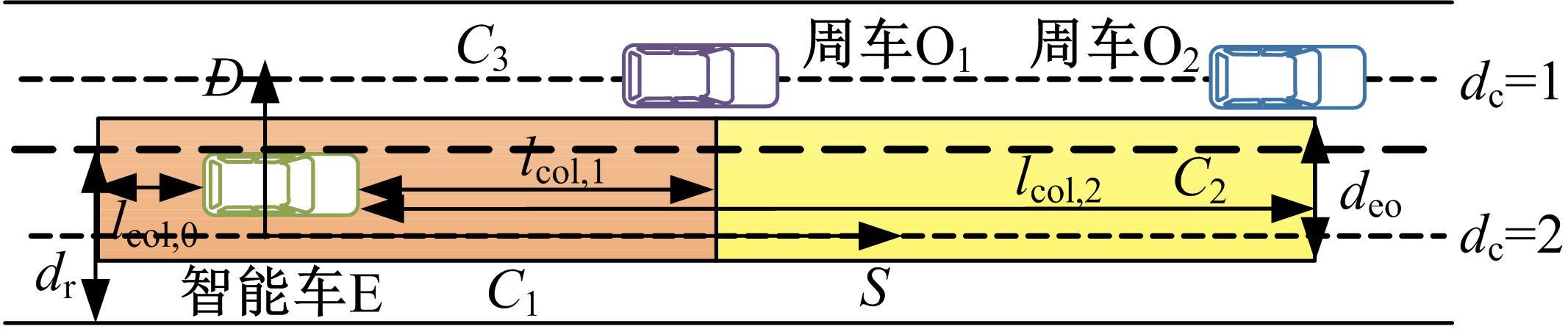
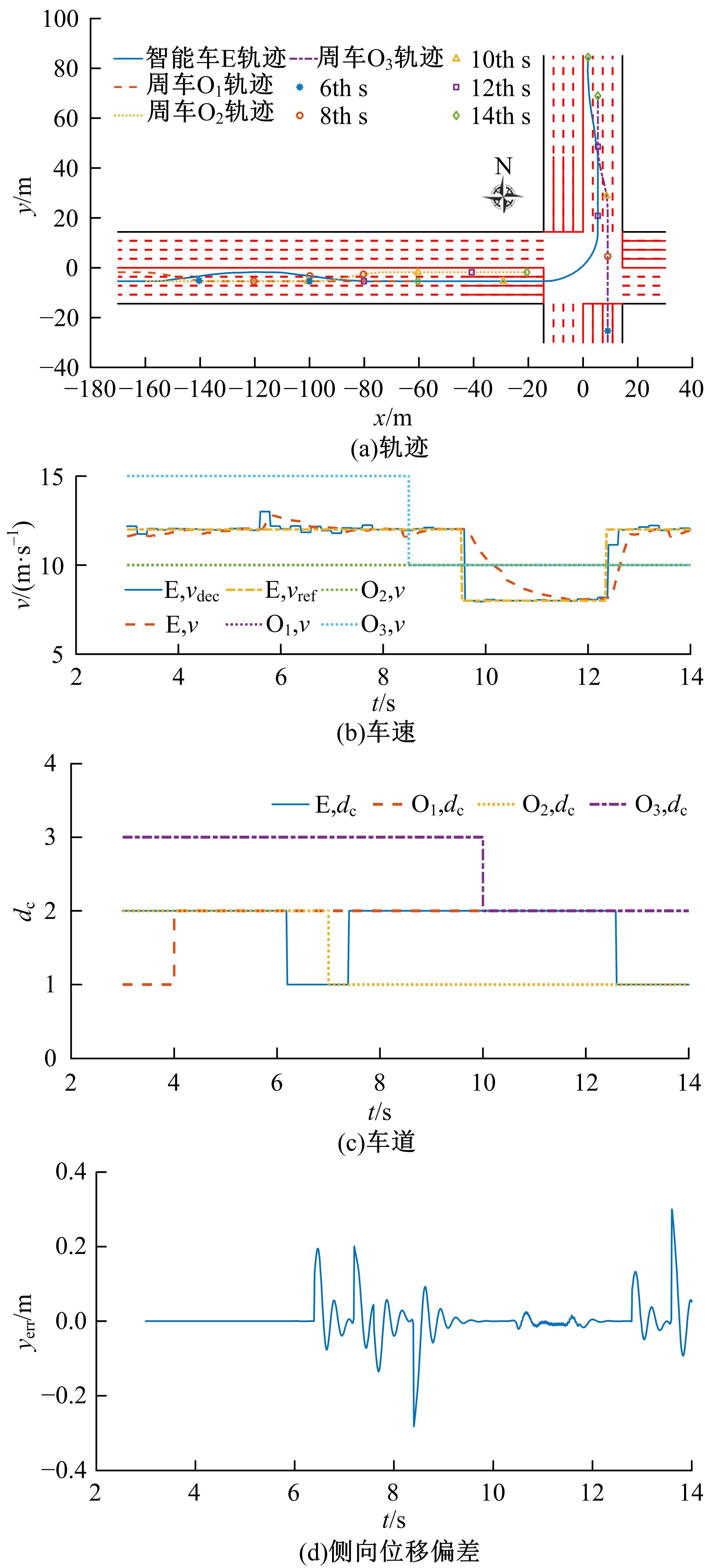
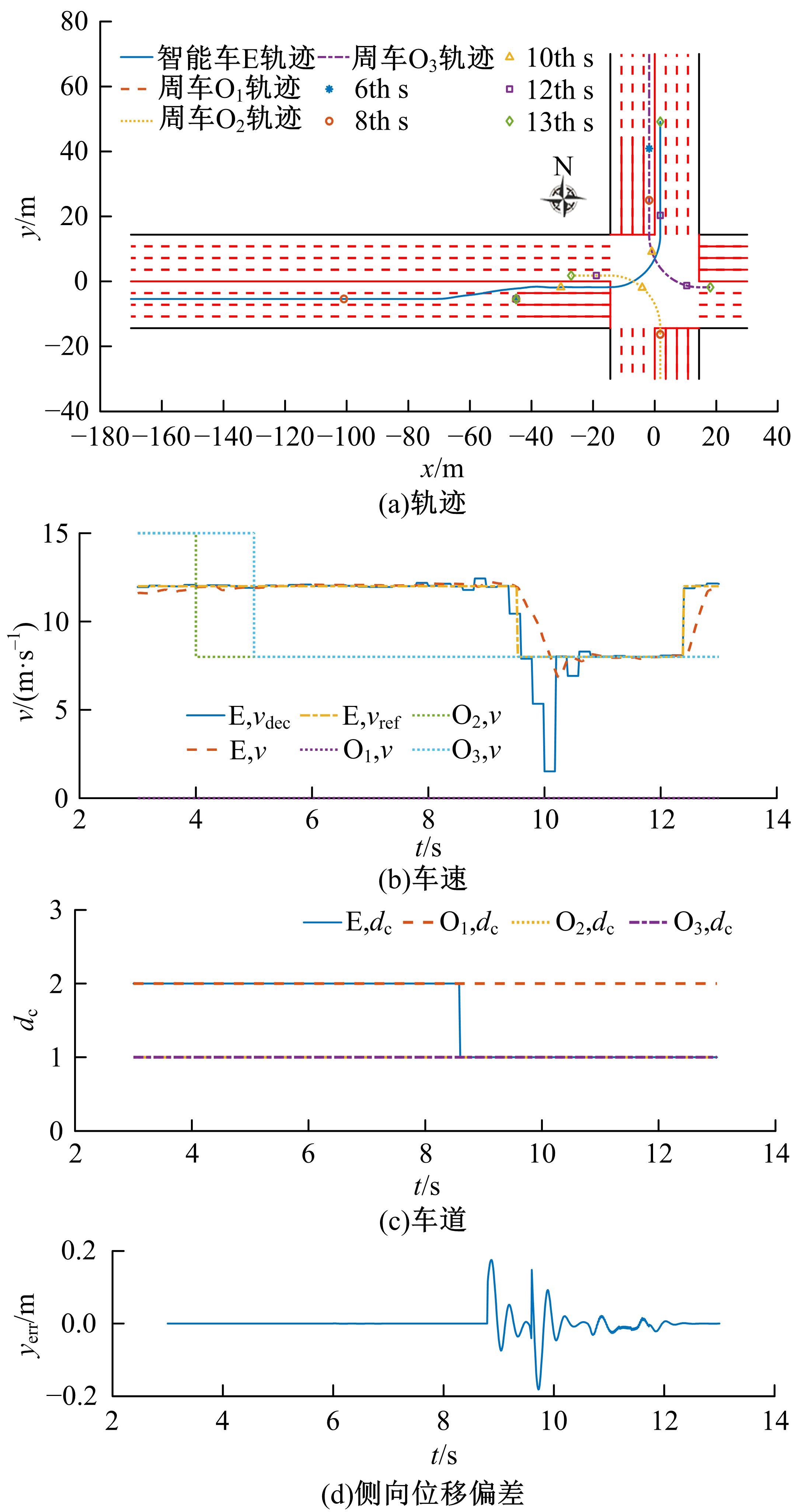
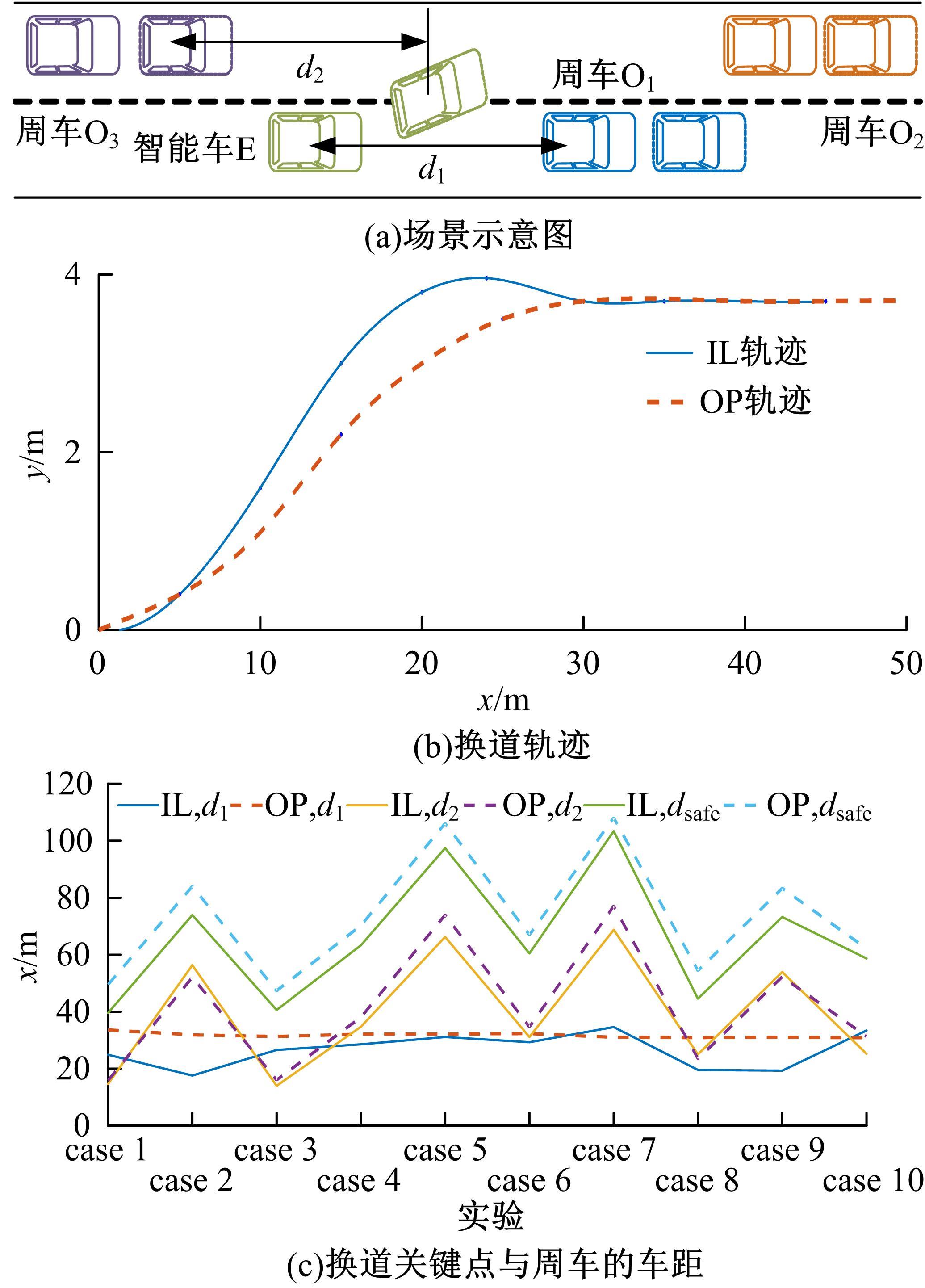
针对智能车在复杂场景下的行车环境理解和行为决策问题,提出了一种智能车辆车道与速度一体化滚动优化决策方法。在复杂场景下建立了车路空间重构模型,得到以不同车道中心线为参考的车辆位置。建立了以非整数的纵向车速和整数的车道序号为控制量的车道与车速一体化模型。对本车与多方向来车的未来轨迹进行安全性分析,将复杂场景下智能车辆车道与速度一体化决策描述为混合整数非线性规划问题。为了验证本文决策方法的有效性,在无保护路口场景下进行汽车动力学仿真软件veDYNA和Simulink的联合仿真,结果表明:本文决策方法面对行驶缓慢、突然切入的周车,能及时做出换道决策;当智能车和周车同时行驶至路口区域时,能够做出减速让行决策,以实现安全行驶。
中图分类号:
- TP273




| 1 | 张家旭, 王晨, 赵健, 等. 面向狭小平行泊车位的路径规划与跟踪控制[J]. 吉林大学学报: 工学版, 2021, 51(5): 1879-1886. |
| Zhang Jia-xu, Wang Chen, Zhao Jian, et al. Path planning and tracking control for narrow parallel parking spaces[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(5): 1879-1886. | |
| 2 | Milanes V, Shladover S E, Spring J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 296-305. |
| 3 | Switkes J P, Rossetter E J, Coe I A, et al. Handwheel force feedback for lanekeeping assistance: combined dynamics and stability[J]. Journal of Dynamic Systems, Measurement, and Control, 2005, 128(3): 532-542. |
| 4 | 国家制造强国建设战略咨询委员会. “绿皮书”助跑机器人—解读“中国制造2025”机器人领域技术路线图[J]. 机器人产业, 2015(5): 36-37. |
| Manufacturing-Power-Construction-Strategy-Advisory-Committee National. "Green Book" run-up robot - interpreting the "Made in China 2025" robot technology roadmap[J]. Robot Industry, 2015(5): 36-37. | |
| 5 | Zhang Lin, Meng Qiang, Chen Hong, et al. Kalman filter-based fusion estimation method of steering feedback torque for steer-by-wire systems[J]. Automotive Innovation, 2021, 4(4): 430-439. |
| 6 | Liu Jun, Dai Qi-kun, Guo Hong-yan, et al. Human-oriented online driving authority optimization for driver-automation shared steering control[J]. IEEE Transactions on Intelligent Vehicles,2022,7(4):863-872. |
| 7 | Karlsson J, Murgovski N, Sjoberg J. Optimal trajectory planning and decision making in lane change maneuvers near a highway exit[C]∥2019 18th European Control Conference (ECC), Naples, Italy, 2019:3254-3260. |
| 8 | 罗开杰, 何赏璐, 叶茂. 智能网联车换道决策建模研究综述[C]∥世界交通运输工程技术论坛(WTC2021)论文集(上), 西安, 中国, 2021: 1456-1463. |
| Luo Kai-jie, He Shang-lu, Ye Mao. A review of lane-changing decision modeling for intelligent connected vehicles[C]∥Proceedings of World Transportation Engineering and Technology Forum (WTC2021) (1), Xi'an, China, 2021: 1456-1463. | |
| 9 | Gipps P G. A model for the structure of lane-changing decisions[J]. Transportation Research, Part B: Methodological, 1986, 20(5): 403-414. |
| 10 | 杨达, 吕蒙, 戴力源, 等. 车联网环境下自动驾驶车辆车道选择决策模型[J]. 中国公路学报, 2022, 35(4): 243-255. |
| Yang Da, Lv Meng, Dai Li-yuan, et al. Lane selection decision model for autonomous vehicle in internet of vehicles[J]. China Journal of Highway and Transport, 2022, 35(4): 243-255. | |
| 11 | Tang Shuang, Shu Hong, Tang Yu. Research on decision-making of lane-changing of automated vehicles in highway confluence area based on deep reinforcement learning[C]∥2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 2021: 1-8. |
| 12 | Noh S, An K. Decision-making framework for automated driving in highway environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(1): 58-71. |
| 13 | Noh S. Decision-making framework for autonomous driving at road intersections: safeguarding against collision, overly conservative behavior, and violation vehicles[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3275-3286. |
| 14 | Hang Peng, Lv Chen, Huang Chao, et al. An integrated framework of decision making and motion planning for autonomous vehicles considering social behaviors[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14458-14469. |
| 15 | Huang Chao, Lv Chen, Hang Peng, et al. Toward safe and personalized autonomous driving: decision-making and motion control with DPF and CDT techniques[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 611-620. |
| 16 | 熊璐, 康宇宸, 张培志, 等. 无人驾驶车辆行为决策系统研究[J]. 汽车技术, 2018(8): 1-9. |
| Xiong Lu, Kang Yu-chen, Zhang Pei-zhi, et al. Research on behavior decision-making system for unmanned vehicle[J]. Automobile Technology, 2018(8): 1-9. | |
| 17 | 余如, 郭洪艳, 陈虹. 自主驾驶车辆的预测避障控制[J]. 信息与控制, 2015, 44(1): 117-124. |
| Yu Ru, Guo Hong-yan, Chen Hong. Predictive obstacle avoidance control for autonomous vehicle[J]. Information and Control, 2015, 44(1): 117-124. | |
| 18 | 魏民祥, 滕德成, 吴树凡. 基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J]. 控制与决策, 2021, 36(4): 815-824. |
| Wei Min-xiang, Teng De-cheng, Wu Shu-fan. Automatic driving trajectory planning and optimization algorithm based on frenet coordinate system[J]. Control and Decision, 2021, 36(4): 815-824. | |
| 19 | Zhu S, Aksun-Guvenc B. Trajectory planning of autonomous vehicles based on parameterized control optimization in dynamic on-road environments[J]. Journal of Intelligent and Robotic Systems, 2020 100(3): 1055-1067. |
| 20 | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013: 213-223. |
| 21 | Xie Guo-tao, Gao Hong-bo, Qian Li-jun, et al. Vehicle trajectory prediction by integrating physics- and maneuver-based approaches using interactive multiple models[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5999-6008. |
| 22 | 金芬. 遗传算法在函数优化中的应用研究[D]. 苏州: 苏州大学电子信息学院, 2008. |
| Jin Fen. Application of genetic algorithm in function optimization[D]. Suzhou: School of Electronic and Information Engineering, Suzhou University, 2008. | |
| 23 | Xi Chen-yang, Shi Tian-yu, Wu Yuan-kai, et al. Efficient motion planning for automated lane change based on imitation learning and mixed-integer optimization[C]∥23rd IEEE International Conference on Intelligent Transportation Systems (ITSC), Electr Network, 2020: 1-6. |
| [1] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [2] | 冯建鑫,王强,王雅雷,胥彪. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1990-1996. |
| [3] | 王宏志,王婷婷,胡黄水,鲁晓帆. 基于Q学习优化BP神经网络的BLDCM转速PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2280-2286. |
| [4] | 胡云峰,丁一桐,赵志欣,蒋冰晶,高金武. 柴油发动机燃烧过程数据驱动建模与滚动优化控制[J]. 吉林大学学报(工学版), 2021, 51(1): 49-62. |
| [5] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
| [6] | 邓丽飞, 石要武, 朱兰香, 于丁力. SI发动机闭环系统故障检测[J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
| [7] | 丛岩峰, 安向京, 陈虹, 喻再涛. 基于滚动优化原理的类车机器人路径跟踪控制[J]. 吉林大学学报(工学版), 2012, 42(01): 182-187. |
| [8] | 于树友,陈虹 . 基于滚动优化的H∞/广义H2主动悬架控制[J]. 吉林大学学报(工学版), 2007, 37(05): 1164-1169. |
|
||