吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (10): 3309-3318.doi: 10.13229/j.cnki.jdxbgxb.20250016
• 计算机科学与技术 • 上一篇
基于YOLOv10-vehicle算法的复杂天气情况下车辆目标检测方法
杜宏( ),顾宸瑜,张孝峥,刘高天,李兴鑫,杨忠琳
),顾宸瑜,张孝峥,刘高天,李兴鑫,杨忠琳
- 中国北方车辆研究所,北京 100072
Vehicle target detection method based on the YOLOv10-vehicle algorithm under complex weather conditions
Hong DU(),Chen-yu GU,Xiao-zheng ZHANG,Gao-tian LIU,Xing-xin LI,Zhong-lin YANG
- China Northern Vehicle Research Institute,Beijing 100072,China
摘要:
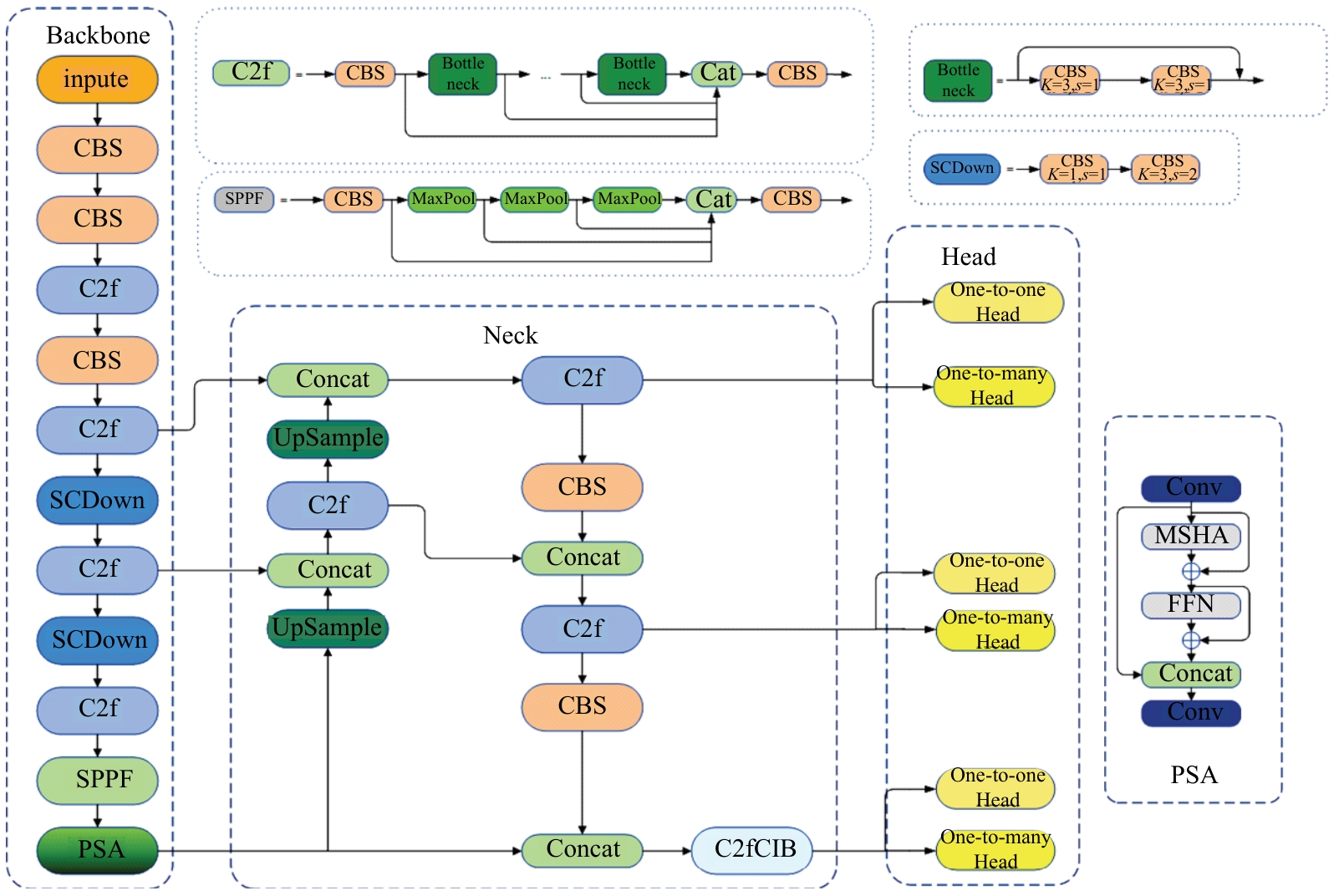
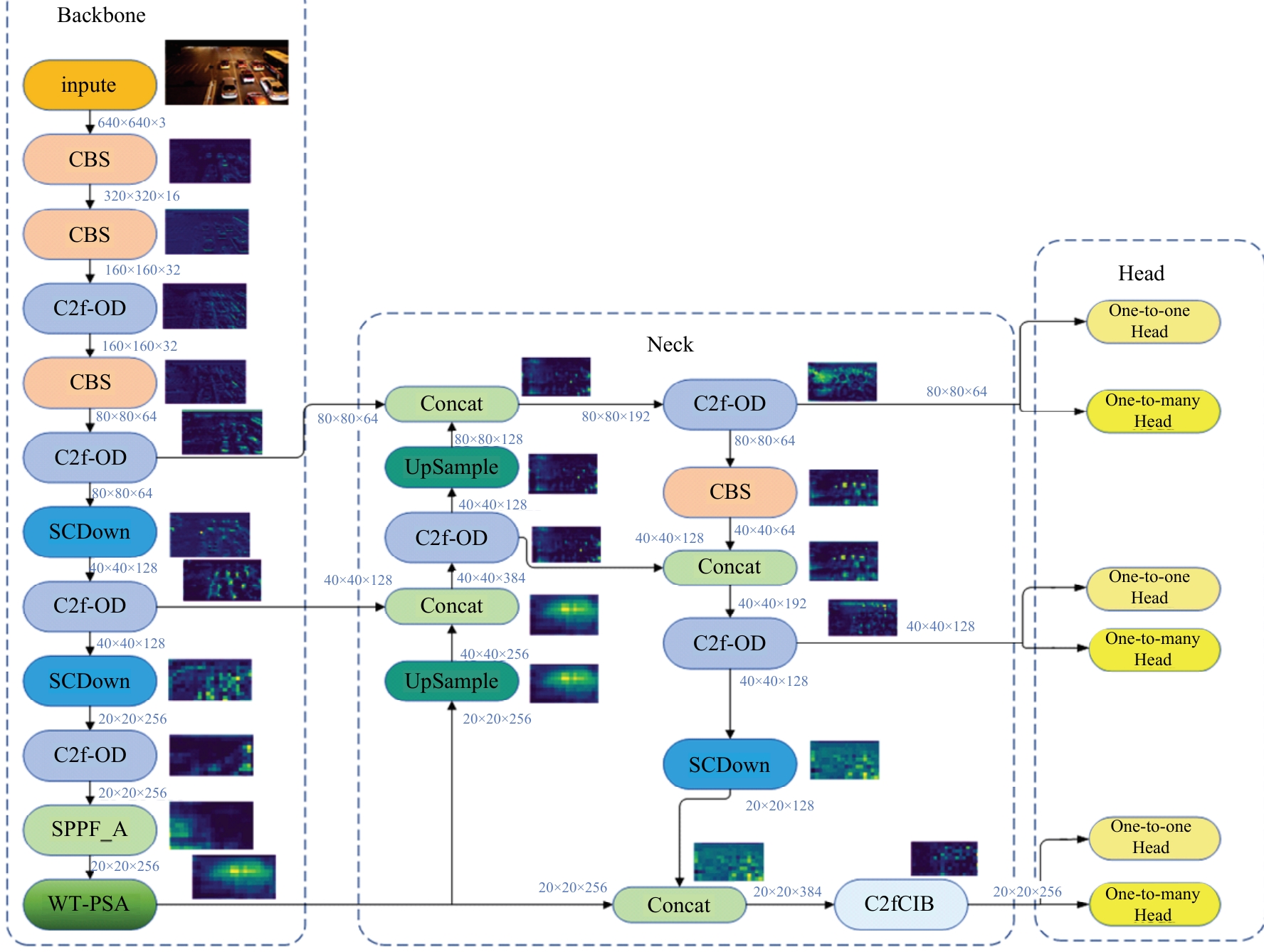
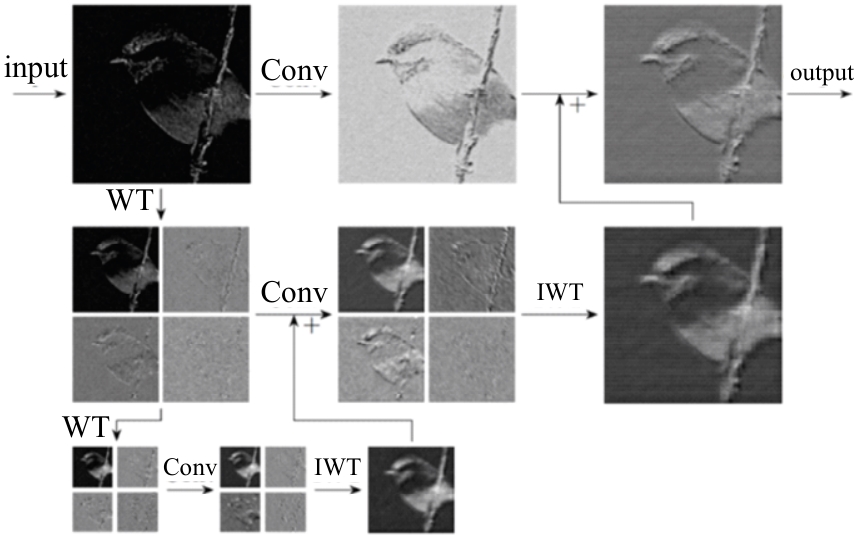
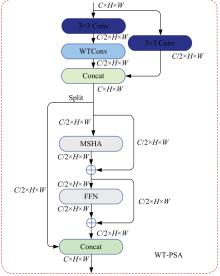
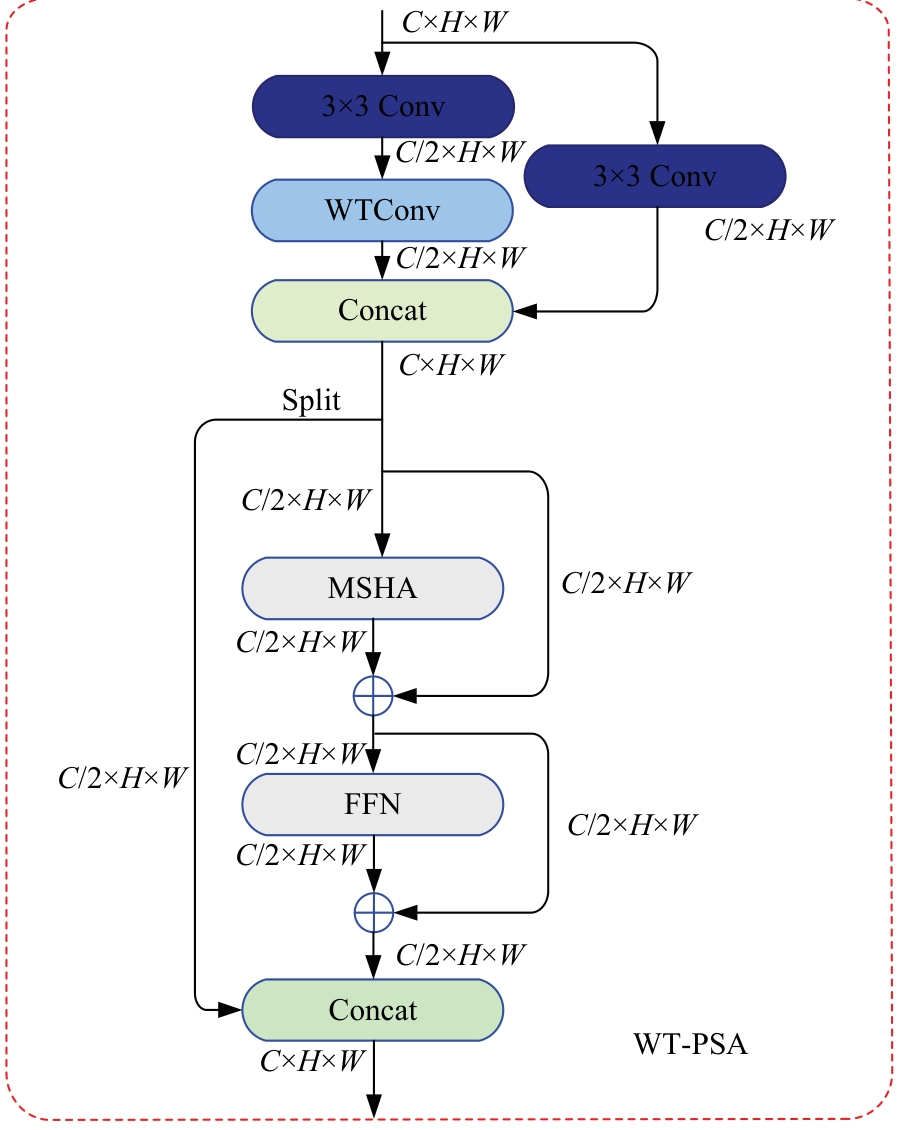
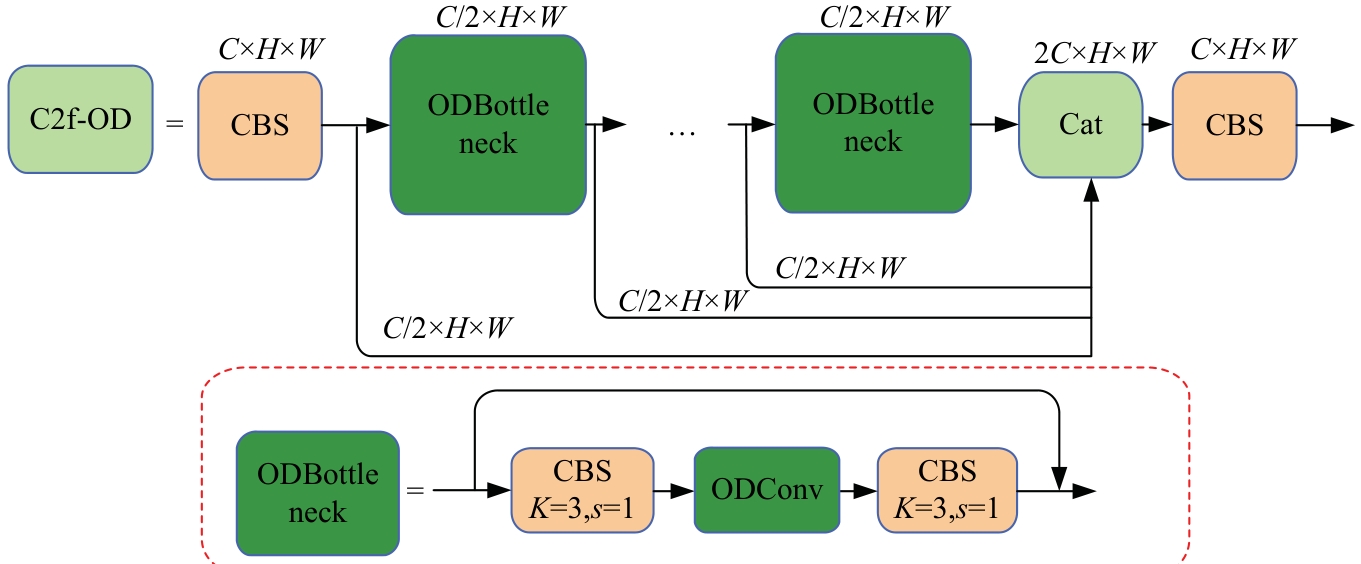
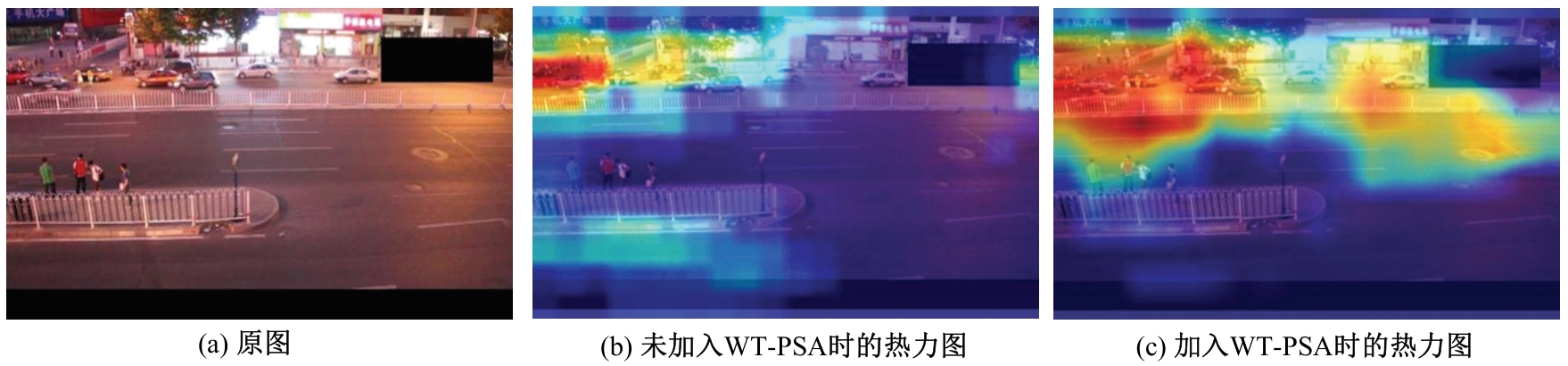
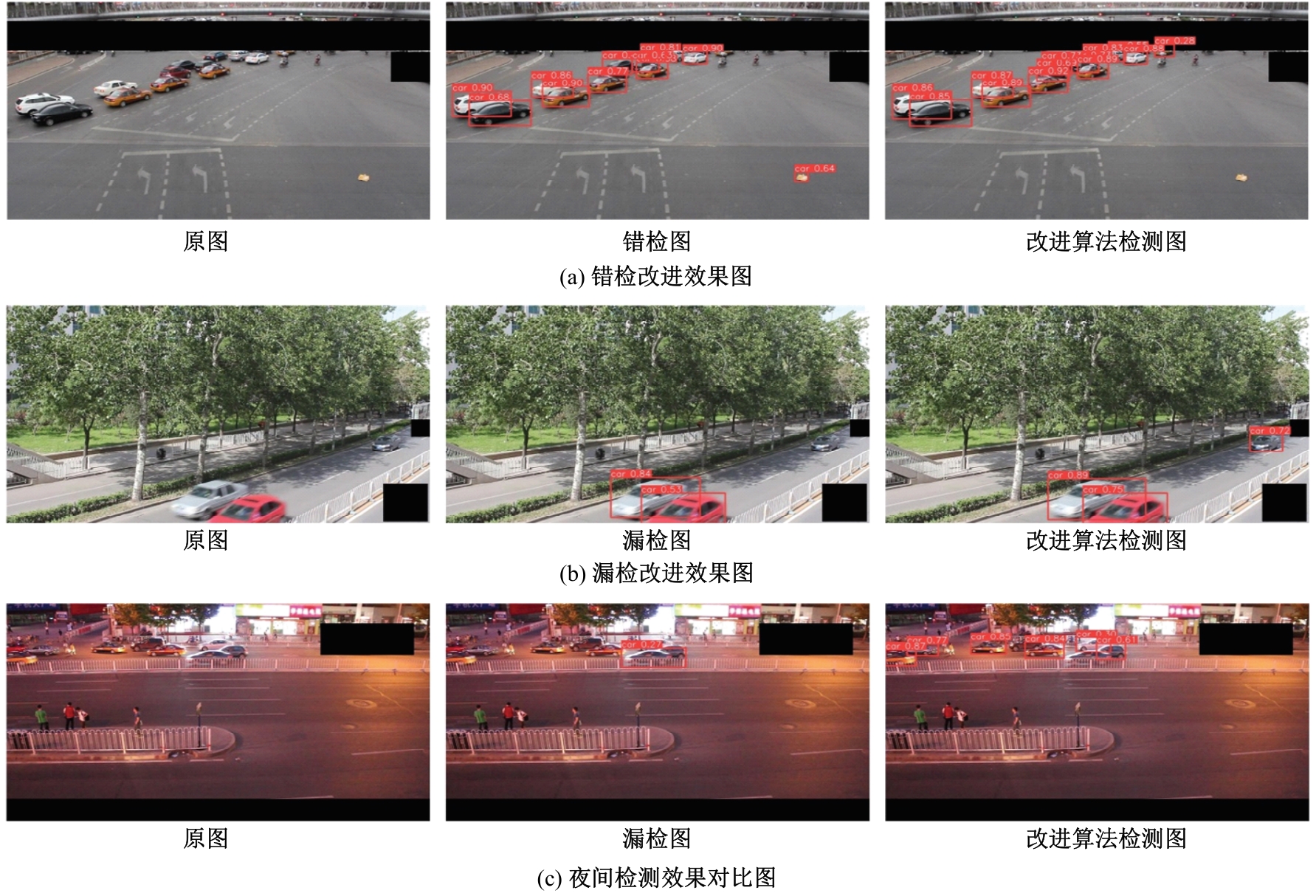
针对在阴天、雨天、夜晚等复杂天气情况下,车辆目标检测受到光照、雨雪、沙尘等因素影响,出现错检、漏检等问题,提出了一种YOLOv10-vehicle目标检测算法。首先,设计了一种新的注意力机制模块WT-PSA,在复杂天气下提高模型对车辆目标的关注度;其次,改进了SPPF模块,通过引入平均池化操作,改善因最大池化操作导致的特征信息提取不足问题;然后,设计了改进的C2f-OD模块,提升主干网络提取图片特征信息的能力;最后,将模型损失函数替换为Focal EIoU,以加快收敛速度并降低损失值;在车辆数据集UA-DETRAC上进行对比实验,改进后的算法平均准确率(mAP@0.5)相较原算法提升了5.1%,证明了YOLOv10-vehicle算法在复杂天气、恶劣天气下车辆检测方面的优越性。同时,在VOC公共数据集上进行实验验证,YOLOv10-vehicle算法在检测车辆目标时检测精度提高了2.8%,证明了本文改进算法的泛化性。
中图分类号:
- TP391.4








| [1] | 赵奇慧, 刘艳洋, 项炎平. 基于深度学习的单阶段车辆检测算法综述[J]. 计算机应用, 2020, 40(): 30-36. |
| Zhao Qi-hui, Liu Yan-yang, Xiang Yan-ping. A review of single-stage vehicle detection algorithms based on deep learning[J]. Journal of Computer Applications, 2020, 40 (Sup.2): 30-36. | |
| [2] | 梁鸿, 王庆玮, 张千, 等.小目标检测技术研究综述[J]. 计算机工程与应用, 2021, 57(1): 17-28. |
| Liang Hong, Wang Qing-wei, Zhang Qian, et al. A review of research on small object detection technology[J]. Computer Engineering and Applications, 2021, 57(1): 17-28. | |
| [3] | Simonyan K, Zisserman A.Very deep convolutional networks for large-scale image recognition[J]. Computer Science, 2014, 21(8): 91-103. |
| [4] | Krizhevsky A, Sutskever I, Hinton E G. ImageNet classification with deep convolutional neural networks[J]. Communications of the ACM, 2017, 60(6): 84-90. |
| [5] | Ren S Q, He K M, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| [6] | 薛珊, 王亚博, 吕琼莹, 等. 基于YOLOX-drone的反无人机系统抗遮挡目标检测算法[J]. 工程科学学报, 2023, 45(9): 1539-1549. |
| Xue Shan, Wang Ya-bo, Qiong-ying Lü, et al. Anti-occlusion target detection algorithm for Anti-UAV systems based on YOLOX-drone[J]. Journal of University of Science and Technology Beijing, 2023, 45(9): 1539-1549. | |
| [7] | 薛珊, 卢涛, 吕琼莹, 等. 基于多尺度融合和轻量化网络的无人机目标检测算法[J]. 湖南大学学报: 自然科学版, 2023, 50(8): 82-93. |
| Xue Shan, Lu Tao, Qiong-ying Lyu, et al. UAV Target detection algorithm based on multi-scale fusion and lightweight network [J]. Journal of Hunan University(Natural Sciences), 2023, 50(8): 82-93. | |
| [8] | 薛珊, 张亚亮, 吕琼莹, 等. 复杂背景下的反无人机系统目标检测算法[J]. 吉林大学学报: 工学版, 2023,53(3): 891-901. |
| Xue Shan, Zhang Ya-liang, Qiong-ying LÜ, et al. Target detection algorithm for Anti-UAV systems in complex backgrounds[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(3): 891-901. | |
| [9] | 周飞, 郭杜杜, 王洋, 等. 基于改进YOLOv8的交通监控车辆检测算法[J]. 计算机工程与应用, 2024, 60(6): 110-120. |
| Zhou Fei, Guo Du-du, Wang Yang, et al. Traffic monitoring vehicle detection algorithm based on improved YOLOv8[J]. Computer Engineering and Applications, 2024, 60(6): 110-120. | |
| [10] | 许德刚, 王双臣, 王再庆, 等. 改进YOLOv8算法的城市车辆目标检测 [J]. 计算机工程与应用, 2024, 60(18): 136-146. |
| Xu De-gang, Wang Shuang-chen, Wang Zai-qing, et al. Urban Vehicle target detection algorithm based on improved YOLOv8[J]. Computer Engineering and Applications, 2024, 60(18): 136-146. | |
| [11] | 张利丰, 田莹. 改进YOLOv8的多尺度轻量型车辆目标检测算法[J]. 计算机工程与应用, 2024, 60(3): 129-137. |
| Zhang Li-feng, Tian Ying. An improved YOLOv8-based multi-scale lightweight vehicle object detection algorithm[J]. Computer Engineering and Applications, 2024, 60(3): 129-137. | |
| [12] | Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 779-788. |
| [13] | Redmon J, Farhadi A. YOLO9000: better, faster, stronger[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 6517-6525. |
| [14] | Redmon J, Farhadi A. YOLOv3: an incremental improvement[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018:774-782. |
| [15] | Bochkovskiy A, Wang C Y, Liao H. YOLOv4: optimal speed and accuracy of object detection[J/OL].[2020-04-23]. . |
| [16] | 薛珊, 陈宇超, 吕琼莹, 等. 基于双支路神经网络的无人机图像识别方法[J]. 计算机仿真, 2023, 40(7): 233-238. |
| Xue Shan, Chen Yu-chao, Qiong-ying Lü, et al. UAV Image recognition method based on dual-branch neural network[J]. Computer Simulation, 2023, 40(7): 233-238. | |
| [17] | Wang A, Chen H, Liu L H, et al. YOLOv10: real-time end-to-end object detection[J/OL].[2020-04-23]. . |
| [18] | Ben-Hamu H, Wolf L, Polyak A. Wavelet convolutions for large receptive fields[J/OL].[2020-04-23]. . |
| [19] | Yao A, Shen Y, Guo Y. Omni-dimensional dynamic convolution[J/OL].[2020-04-23]. . |
| [20] | Zhang Y, Ren W, Zhang Z, et al. Focal and efficient IOU loss for accurate bounding box regression[J/OL].[2020-04-23]. . |
| [21] | 薛珊, 张振, 吕琼莹, 等. 基于卷积神经网络的反无人机系统图像识别方法[J]. 红外与激光工程, 2020, 49(7): 250-257. |
| Xue Shan, Zhang Zhen, Qiong-ying Lü, et al. Image recognition method of anti-UAV system based on convolutional neural network[J]. Infrared and Laser Engineering, 2020, 49(7): 250-257. | |
| [22] | Jocher G, Chaurasia A, Qiu J. YOLO by ultralytics[J/OL].[2020-04-23].. |
| [1] | 徐铖铖, 刘攀, 王炜, 李志斌. 恶劣天气下高速公路实时事故风险预测模型[J]. 吉林大学学报(工学版), 2013, 43(01): 68-73. |
|
||