吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (4): 1453-1466.doi: 10.13229/j.cnki.jdxbgxb.20230733
海上被动无人搜救路线规划方法
张寒1( ),黄炎焱1(),耿泽1,陈天德2
),黄炎焱1(),耿泽1,陈天德2
- 1.南京理工大学 自动化学院,南京 210094
2.中国电子科技集团第二十八研究所,南京 210007
Passive unmanned maritime search and rescue routing method
Han ZHANG1(),Yan-yan HUANG1(),Ze GENG1,Tian-de CHEN2
- 1.School of Automation,Nanjing University of Science and Technology,Nanjing 210094,China
2.The 28th Research Institute of China Electronics Technology Group Corporation,Nanjing 210007,China
摘要:
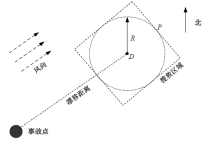
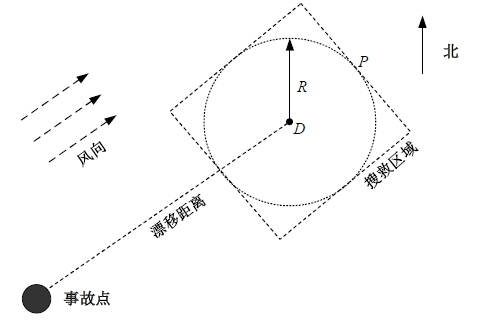
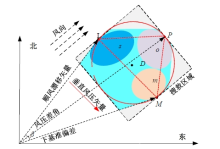
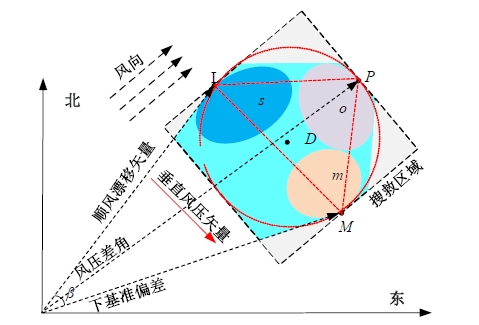
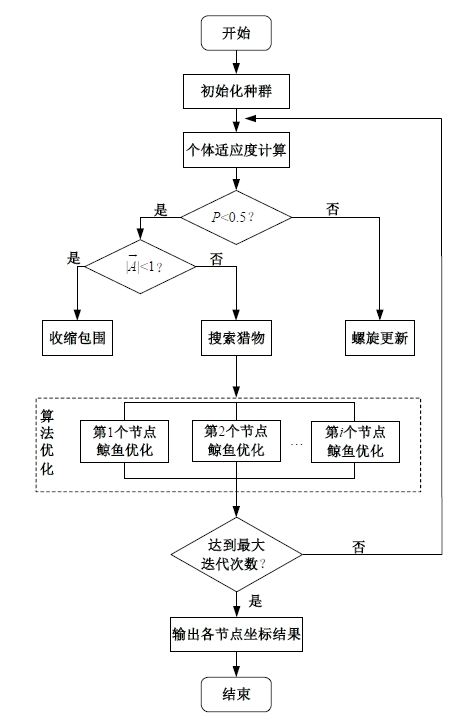
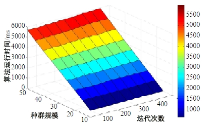
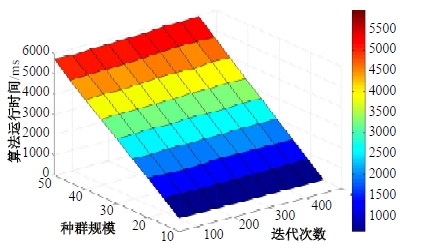
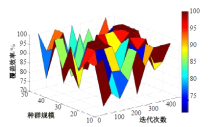
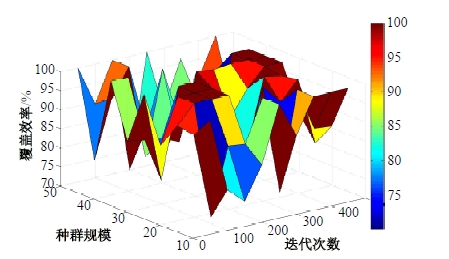
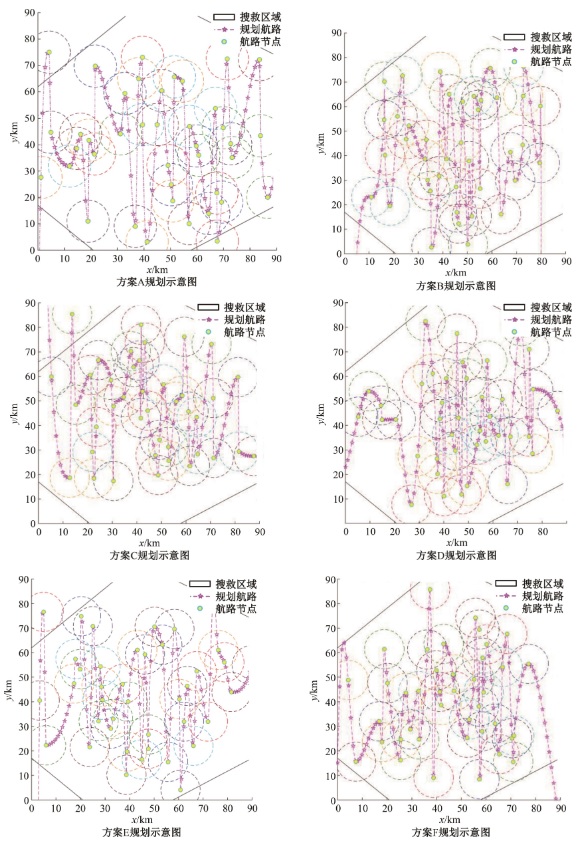
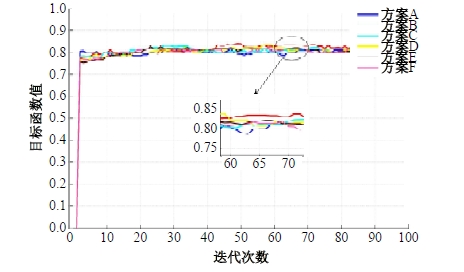
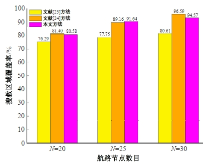
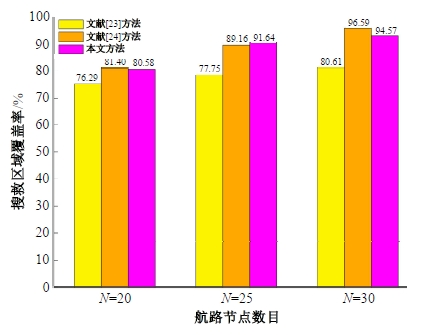
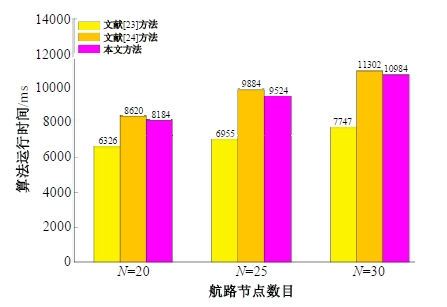
针对海上被动无人搜救任务中目标区域难以确定、搜索范围广泛、搜救区域航路规划速度慢等问题,提出了一种面向被动无人搜救任务的海上搜救区域规划流程及航路规划模型。根据海上搜救任务预案与航路规划需求,并结合海上搜救区域规划方法构建航路优选模型,利用搜救区域覆盖效率和搜救航路消耗成本等约束进行目标函数构建,采用鲸鱼优化算法求解,设计想定实验进行分析验证。研究表明:本文提出的海上被动无人搜救航路规划模型能够快速确定搜救范围,较好地搜索到代价更低的搜救路线。
中图分类号:
- TP391.9

| [1] | 孙万, 柳堤, 李政. 我国海上人命救助现状、问题和对策初探[J]. 今日科苑, 2021(7): 26-32. |
| Sun Wan, Liu Di, Li Zheng. Preliminary study on current status, problems, and potential innovations of maritime life salvage in China[J]. Modern Science, 2021(7): 26-32. | |
| [2] | 朱岿, 牟林, 王道胜, 等. 海上搜救辅助决策技术研究进展[J]. 应用海洋学学报, 2019, 38(3): 440-449. |
| Zhu Kui, Mou Lin, Wang Dao-sheng, et al. Advance in maritime search and rescue decision support techniques[J]. Journal of Applied Oceanography, 2019, 38(3): 440-449. | |
| [3] | 王秀玲, 尹勇, 赵延杰, 等. 无人艇海上搜救路径规划技术综述[J]. 船舶工程, 2023, 45(4): 50-57. |
| Wang Xiu-ling, Yin Yong, Zhao Yan-jie, et al. Overview of USV maritime search and rescue path planning technology[J]. Ship Engineering, 2023, 45(4): 50-57. | |
| [4] | 李宁, 张强. 基于北斗系统的海上应急救援系统的研究[J]. 中国海事, 2019(7): 49-51. |
| Li Ning, Zhang Qiang. On the emergent maritime search and rescue system based on the Beidou System [J]. China Maritime Safety, 2019(7): 49-51. | |
| [5] | 陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3): 651-658. |
| Chen Tian-de, Huang Yan-yan, Shen Wei. Non-oscillation path planning based on virtual obstacle method[J]. Acta Armamentarii, 2019, 40(3):651-658. | |
| [6] | Jiang T, Lin D, Song T. Finite-time control for small-scale unmanned helicopter with disturbances[J]. Nonlinear Dynamics, 2019, 96: 1747-1763. |
| [7] | Melsom A, Counillon F, La Casce J H, et al. Forecasting search areas using ensemble ocean circulation modeling[J]. Ocean Dynamics, 2012, 62: 1245-1257. |
| [8] | Cho S W, Park H J, Lee H, et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers & Industrial Engineering, 2021, 161: No.107612. |
| [9] | Ai B, Jia M, Xu H, et al. Coverage path planning for maritime search and rescue using reinforcement learning[J]. Ocean Engineering, 2021, 241: No. 110098. |
| [10] | Larson J, Bruch M, Ebken J. Autonomous navigation and obstacle avoidance for unmanned surface vehicles[C]∥Unmanned Systems Technology VIII,Orlando,USA, 2006, 6230: 53-64. |
| [11] | Campbell S, Naeem W, Irwin G W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J]. Annual Reviews in Control, 2012, 36(2): 267-283. |
| [12] | 熊勇, 余嘉俊, 张加, 等. 无人艇研究进展及发展方向[J]. 船舶工程, 2020, 42(2): 12-19. |
| Xiong Yong, Yu Jia-jun, Zhang Jia, et al. Research progress and development direction of unmanned boat[J]. Ship Engineering, 2020, 42(2): 12-19. | |
| [13] | 王浩亮, 尹晨阳, 卢丽宇, 等. 面向海上搜救的UAV与USV集群协同路径跟踪控制[J]. 中国舰船研究, 2022, 17(5): 157-165. |
| Wang Hao-liang, Yin Chen-yang, Lu Li-yu, et al. Cooperative path following control of UAV and USV cluster for maritime search and rescue[J]. Chinese Journal of Ship Research, 2022, 17(5): 157-165. | |
| [14] | Nash L, Hover G L, Burns R E. Additional analysis of probability of detection(POD) in search and rescue (SAR) project data[R].New London: Analysis and Technology, 1982. |
| [15] | 李家林, 张建强, 李春来. 基于优化人工势场法的无人艇局部路径规划[J]. 舰船科学技术, 2022, 44(16): 69-73. |
| Li Jia-lin, Zhang Jian-Qiang, Li Chun-lai. Local path planning of unmanned boat based on optimized artificial potential field method[J]. Ship Science and Technology, 2022, 44(16): 69-73. | |
| [16] | Breivik Ø, Allen A A, Maisondieu C, et al. Wind-induced drift of objects at sea: the leeway field method[J]. Applied Ocean Research, 2011, 33(2): 100-109. |
| [17] | 王军, 于安民, 杨春林. 海上搜寻船舶选择问题研究[J]. 重庆交通大学学报:自然科学版, 2021, 40(3):7-15. |
| Wang Jun, Yu An-min, Yang Chun-lin. Selection problem of search ship at sea[J]. Journal of Chongqing Jiaotong University (Natural Science), 2021, 40(3): 7-14. | |
| [18] | 李鸿一, 陈锦涛, 任鸿儒, 等. 基于随机采样的高层消防无人机协同搜索规划[J]. 中国科学: 信息科学,2022, 52(9): 1610-1626. |
| Li Hong-yi, Chen Jin-tao, Ren Hong-ru, et al. Random-sampling-based multi-UAV cooperative search planning for high-rise firefighting[J]. Science in China(Information Sciences), 2022, 52(9): 1610-1626. | |
| [19] | Mirjalili S, Lewis A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| [20] | 周寅飞, 张立华, 贾帅东, 等. 最大可航窗口序列约束贝塞尔曲线的无人船自主航行航线规划方法[J].武汉大学学报: 信息科学版, 2024, 49(7): 1224-1236. |
| Zhou Yin-fei, Zhang Li-hua, Jia Shuai-dong, et al. Autonomous navigation route planning method of unmanned ship based on bessel curves constrained by maximum navigable window sequence[J]. Geomatics and Information Science of Wuhan University, 2024, 49(7): 1224-1236. | |
| [21] | 王晓光, 何晓夫, 武学祺. 基于多属性折中决策的空面制导弹药配置方案评价与优选[J]. 弹箭与制导学报, 2019, 39(1): 139-142. |
| Wang Xiao-guang, He Xiao-fu, Wu Xue-qi. Function evaluation and optimal selection of air-surface guided ammunition configuration based on VIKOR [J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2019, 39(1): 139-142. | |
| [22] | 袁书泽. 海难人命救助的有效时限初步探讨[J]. 中国医药科学, 2011, 11(1): 146,149. |
| Yuan Shu-ze. Preliminary discussion on the effective time limit of life-saving disaster relief[J]. China Medicine and Pharmacy, 2011, 11(1): 146,149. | |
| [23] | 任东彦. 海上搜救力量配置问题研究[J]. 舰船电子工程, 2022, 42(1): 19-22. |
| Ren Dong-yan. Research on configuration of search and rescue forces at sea[J]. Ship Electronic Engineering, 2022, 42(1): 19-22. | |
| [24] | 罗志远, 丰硕, 刘小峰, 等. 一种基于分步遗传算法的多无人清洁车区域覆盖路径规划方法[J]. 电子测量与仪器学报, 2020, 34(8): 43-50. |
| Luo Zhi-yuan, Feng Shuo, Liu Xiao-feng, et al. Method of area coverage path planning of multi-unmanned cleaning vehicles based on step by step genetic algorithm[J]. Journal of Electronic Measurement and Instrumentation, 2020, 34(8): 43-50. |
| [1] | 佘智勇,朱彤鸣,刘旺魁. 基于近端策略优化的高速无人飞行器上升段在线轨迹规划[J]. 吉林大学学报(工学版), 2023, 53(3): 863-870. |
| [2] | 杨毅,王斯财,南英. 大型水陆两栖飞机海上最优搜索航路规划算法[J]. 吉林大学学报(工学版), 2019, 49(3): 963-971. |
|