吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (4): 1443-1452.doi: 10.13229/j.cnki.jdxbgxb.20230656
移动装弹机械臂的逆运动学多种群灰狼算法求解方法
胡云峰1,2( ),李佳敏2,唐志国2()
),李佳敏2,唐志国2()
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
Solving method on inverse kinematics of mobile loading missile manipulator by multi-population grey wolf optimization algorithm
Yun-feng HU1,2(),Jia-min LI2,Zhi-guo TANG2()
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
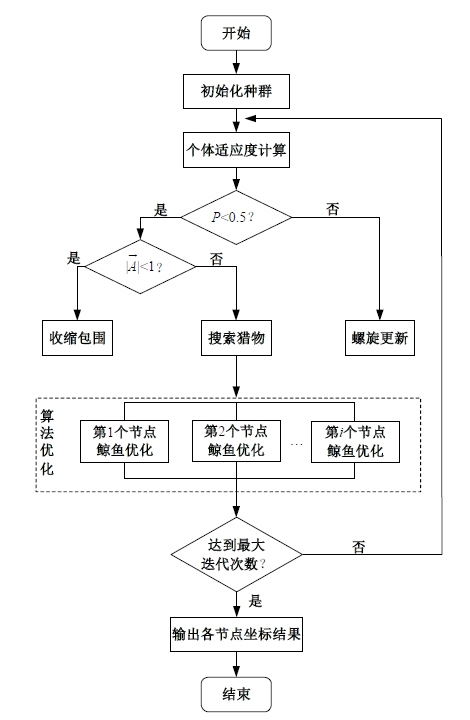
针对移动装弹机械臂逆运动学求解性能需要提升的问题,提出了一种基于多种群灰狼算法的逆运动学求解方法。首先,将机械臂的逆运动学问题转化成了一个等效最优问题,并依据优化目标建立了适应度函数。其次,基于灰狼算法拓展了灰狼种群数量,引入了粒子群算法及最优个体反向指导的位置更新方式,并且设置了随机重组阈值淘汰机制。然后,应用多种群灰狼算法循环迭代求逆,当适应度函数值趋近于0即可得到逆解。最后,通过与其他算法求解仿真对比表明:本文所提出的逆运动学求解方法具有更好的收敛性、求解精度及重复精度。
中图分类号:
- TP241
| [1] | 霍希建, 刘伊威, 姜力,等. 具有关节限位的7R仿人机械臂逆运动学优化[J]. 吉林大学学报: 工学版, 2016, 46(1): 213-220. |
| Huo Xi-jian, Liu Yi-wei, Jiang Li, et al. Inverse kinematics optimization of a 7R humanoid robot arm with joint limits [J]. Journal of Jilin University(Engineering and Technology Edition ), 2016, 46(1): 213-220. | |
| [2] | 石建平, 刘鹏, 陈冬云. 基于改进粒子群优化算法的冗余机械臂逆运动学求解[J]. 机械传动, 2021, 45(2): 69-75. |
| Shi Jian-ping, Liu Peng, Chen Dong-yun. Inverse kinematics of redundant manipulator based on improved particle swarm optimization algorithm[J]. Journal of Mechanical Transmission, 2021, 45(2): 69-75. | |
| [3] | 冷舒, 吴克, 居鹤华. 机械臂运动学建模及解算方法综述[J]. 宇航学报, 2019, 40(11): 1262-1273. |
| Leng Shu, Wu Ke, Ju He-hua, Kinematics modeling and calculating method of mechanical arm review [J]. Journal of Aerospace, 2019, 40(11): 1262-1273. | |
| [4] | Alkayyali M, Tutunji T A. PSO-based algorithm for inverse kinematics solution of robotic arm manipulators[C]∥20th International Conference on Research and Education in Mechatronics (REM),IEEE, Wels, Austria, 2019: 1-6. |
| [5] | Ghosh A, Singh O, Ray A K. Inverse kinematic solution of a 7 DOF robotic manipulator using boundary restricted particle swarm optimization[J]. IFAC-PapersOnLine, 2022, 55(1): 101-105. |
| [6] | Liu Y, Xi J, Bai H, et al. A general robot inverse kinematics solution method based on improved PSO algorithm[J]. IEEE Access, 2021, 9: 32341-32350. |
| [7] | Gao R. Inverse kinematics solution of robotics based on neural network algorithms[J]. Journal of Ambient Intelligence and Humanized Computing, 2020, 11(12): 6199-6209. |
| [8] | Nguyen T, Bui T, Pham H. Using proposed optimization algorithm for solving inverse kinematics of human upper limb applying in rehabilitation robotic[J]. Artificial Intelligence Review, 2022, 55(1): 679-705. |
| [9] | Ahmed E S, Elhosseini M A, Haikal A Y. A new ABC variant for solving inverse kinematics problem in 5 DOF robot arm[J]. Applied Soft Computing, 2018, 73: 24-38. |
| [10] | 杨凯, 黄晋英. 一种8自由度空间机械臂运动学及工作空间分析[J]. 机械传动, 2021, 45(3): 147-152. |
| Yang Kai, Huang Jin-ying. Kinematics and workspace analysis of a 8-DOF space manipulator[J]. Mechanical Transmission, 2021, 45(3): 147-152. | |
| [11] | 张清松, 段帅臣, 夏热. 基于Matlab的拟人机械臂工作空间分析及仿真[J]. 机械传动, 2020, 44(12): 99-105. |
| Zhang Qing-song, Duan Shuai-chen, Xia Re. Workspace analysis and simulation of anthropomorphic robotic arm based on Matlab[J]. Mechanical Transmission, 2020, 44(12): 99-105. | |
| [12] | Mirjalili S, Mirjalili S M, Lewis A. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. |
| [13] | 张晓凤, 王秀英. 灰狼优化算法研究综述[J]. 计算机科学, 2019, 46(3): 30-38. |
| Zhang Xiao-feng, Wang Xiu-ying, Review of grey wolf optimization algorithm[J]. Computer Science, 2019, 46(3): 30-38. | |
| [14] | Rezaei F, Safavi H R, Abd Elaziz M, et al. An enhanced grey wolf optimizer with a velocity-aided global search mechanism[J]. Mathematics, 2022, 10(3):No.351. |
| [1] | 宫洵,任航,张华霖,汪介瑜,胡云峰,孙耀. 冬季网联纯电动汽车热泵空调生态制热控制方法[J]. 吉林大学学报(工学版), 2025, 55(3): 820-828. |
| [2] | 鲜斌,王光怡,蔡佳明. 多无人机吊挂负载运输系统的非线性鲁棒控制设计[J]. 吉林大学学报(工学版), 2024, 54(6): 1788-1795. |
| [3] | 王宏志,王婷婷,兰淼淼,徐硕. 基于位置跟踪的机械臂多电机新型滑模控制策略[J]. 吉林大学学报(工学版), 2024, 54(5): 1443-1458. |
| [4] | 赵军,赵子亮,朱庆林,郭斌. 不依赖观测器的不确定性系统输出反馈鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(3): 828-835. |
| [5] | 齐国元,陈浩. 基于观测器的四旋翼控制-抗扰-避障一体化[J]. 吉林大学学报(工学版), 2023, 53(3): 810-822. |
| [6] | 陈珑茏,冯天宇,吕宗阳,吴玉虎. 共轴倾转旋翼无人机有限时间滑模姿态控制[J]. 吉林大学学报(工学版), 2023, 53(3): 883-890. |
| [7] | 徐卓君,王耀祥,黄兴,彭程. 多无人机地面移动目标搜寻和定位[J]. 吉林大学学报(工学版), 2023, 53(3): 832-840. |
| [8] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [9] | 齐国元,李阔,王琨. 基于补偿函数观测器的四旋翼无人机姿态受限控制[J]. 吉林大学学报(工学版), 2023, 53(3): 853-862. |
| [10] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [11] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [12] | 马彦,郭则宣. 基于改进BPNN⁃MPF算法的锂离子电池SoE估计[J]. 吉林大学学报(工学版), 2023, 53(1): 263-272. |
| [13] | 王宏志,王婷婷,胡黄水,鲁晓帆. 基于Q学习优化BP神经网络的BLDCM转速PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 2280-2286. |
| [14] | 冯建鑫,王强,王雅雷,胥彪. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51(6): 1990-1996. |
| [15] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
|