吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (1): 150-161.doi: 10.13229/j.cnki.jdxbgxb.20230371
• 交通运输工程·土木工程 • 上一篇
自动驾驶接管过程中驾驶能力恢复状态对交通流振荡特性的影响
王长帅( ),徐铖铖(),任卫林,彭畅,佟昊
),徐铖铖(),任卫林,彭畅,佟昊
- 东南大学 交通学院,南京 201196
Impacts of driving ability recovery state on characteristics of traffic oscillation in automated driving takeover process
Chang-shuai WANG(),Cheng-cheng XU(),Wei-lin REN,Chang PENG,Hao TONG
- School of Transportation,Southeast University,Nanjing 211189,China
摘要:
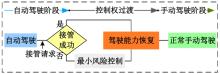
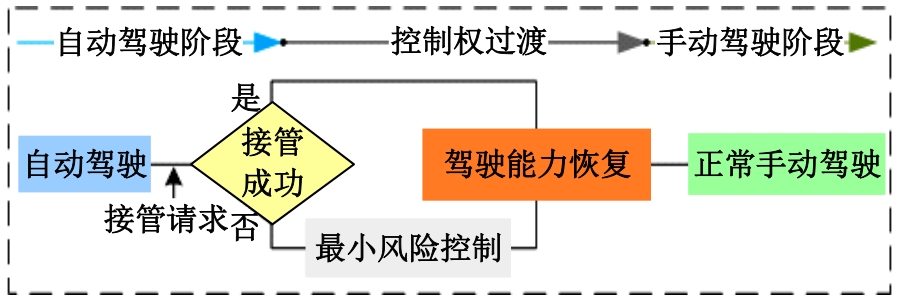
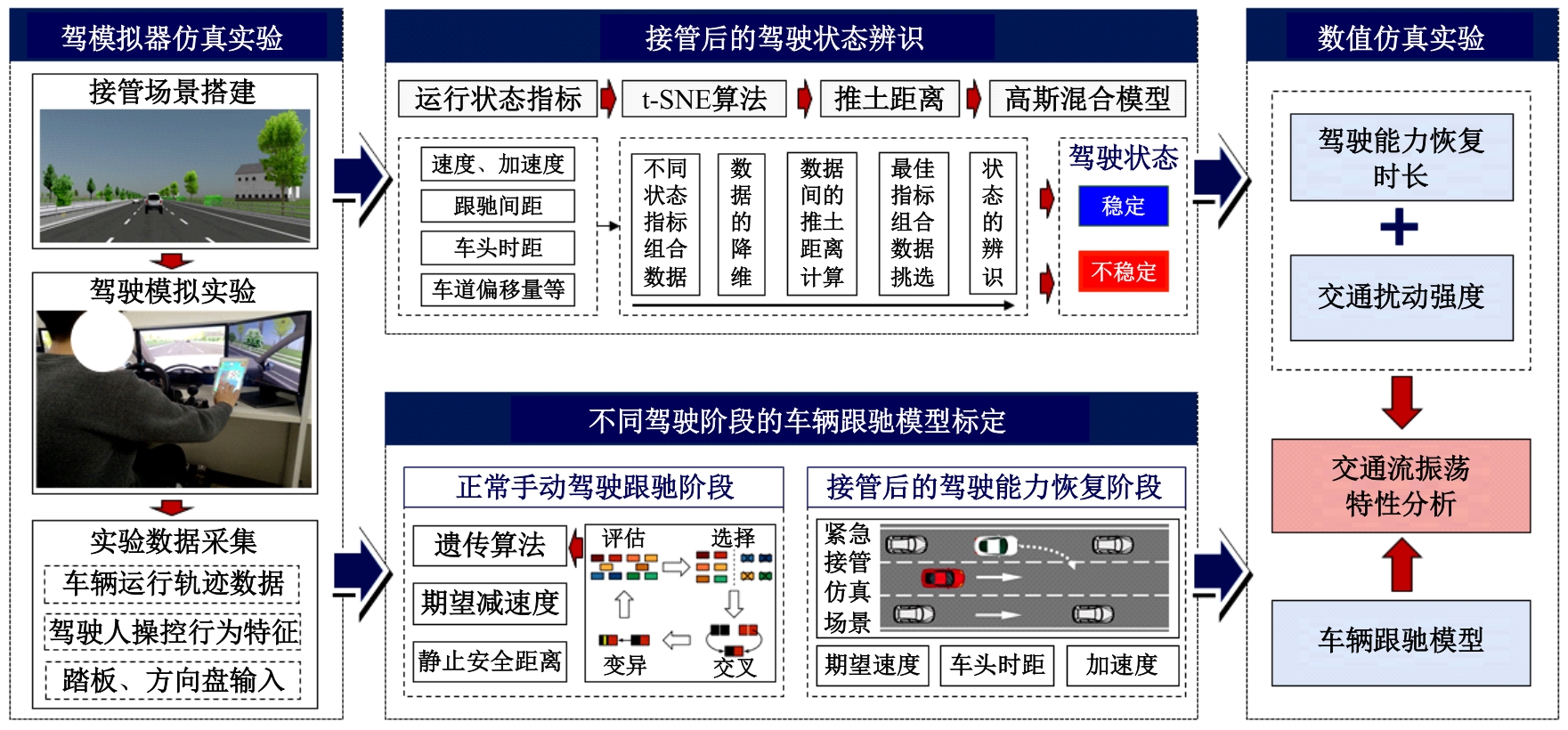
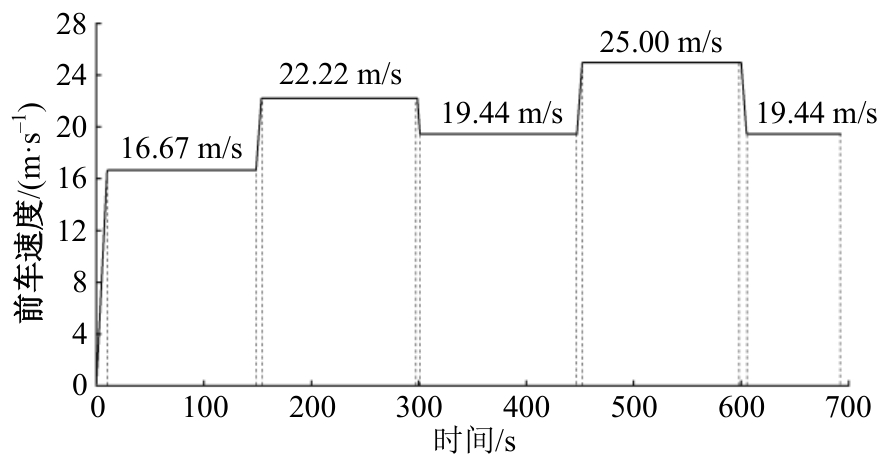
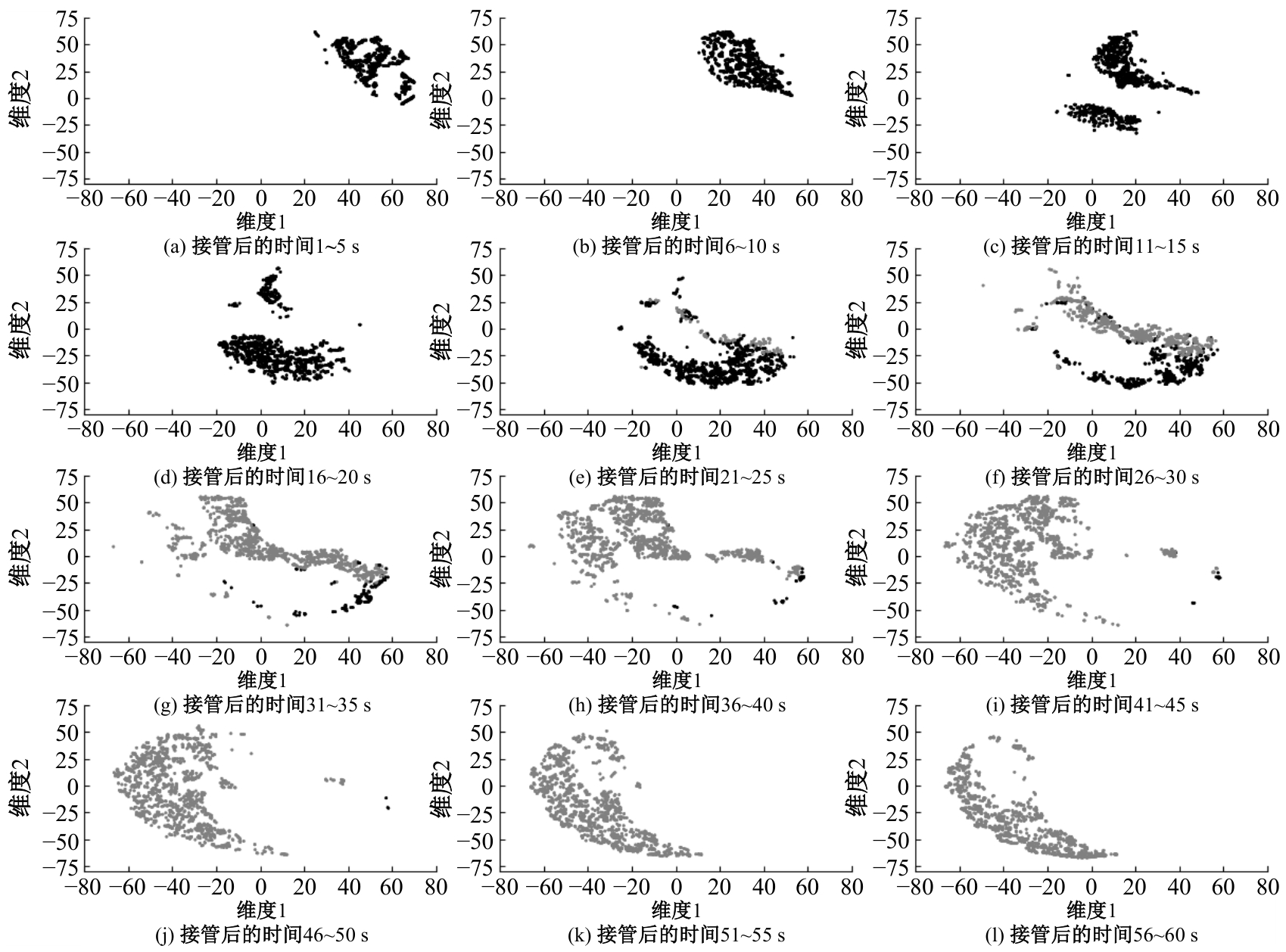
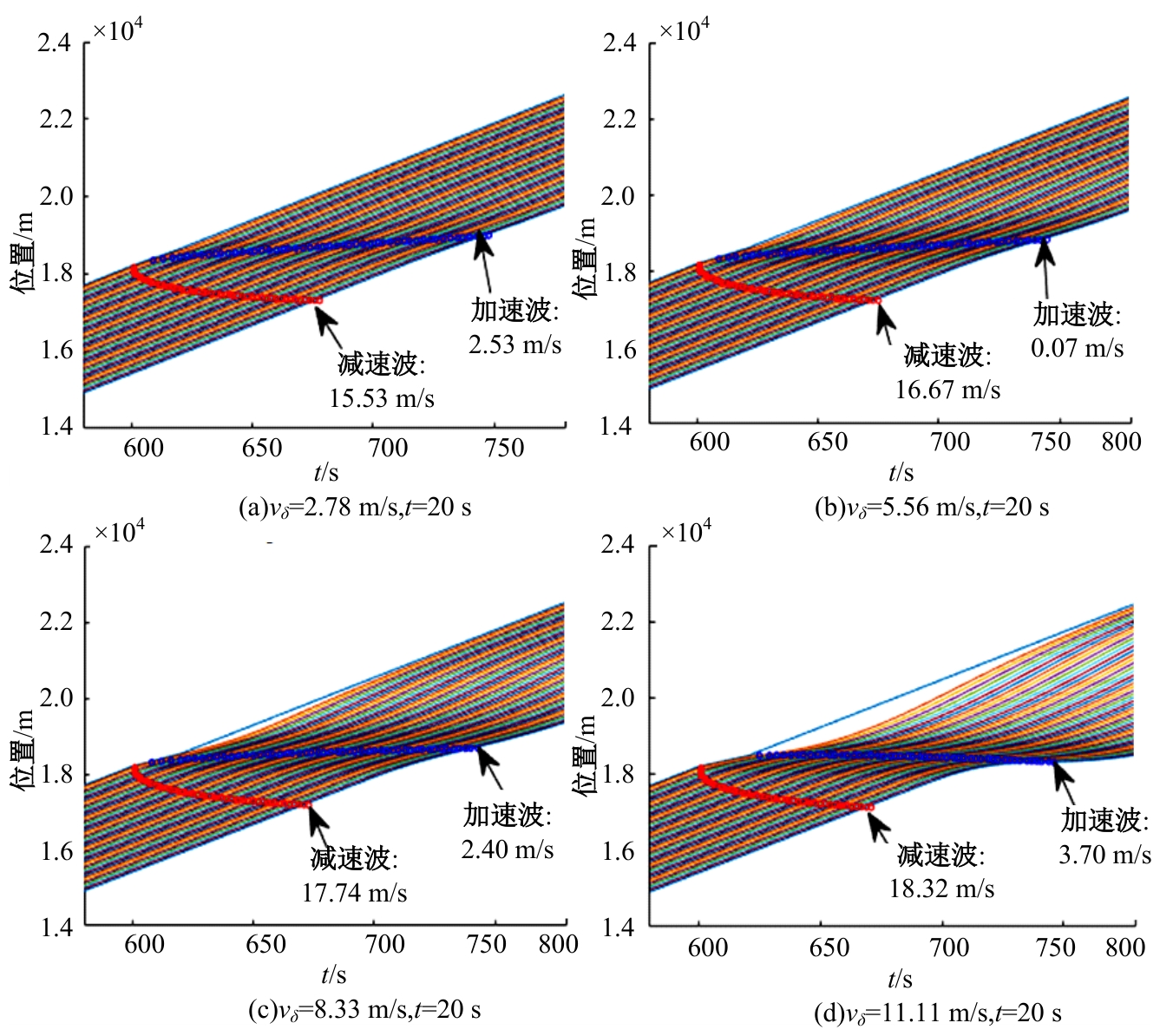
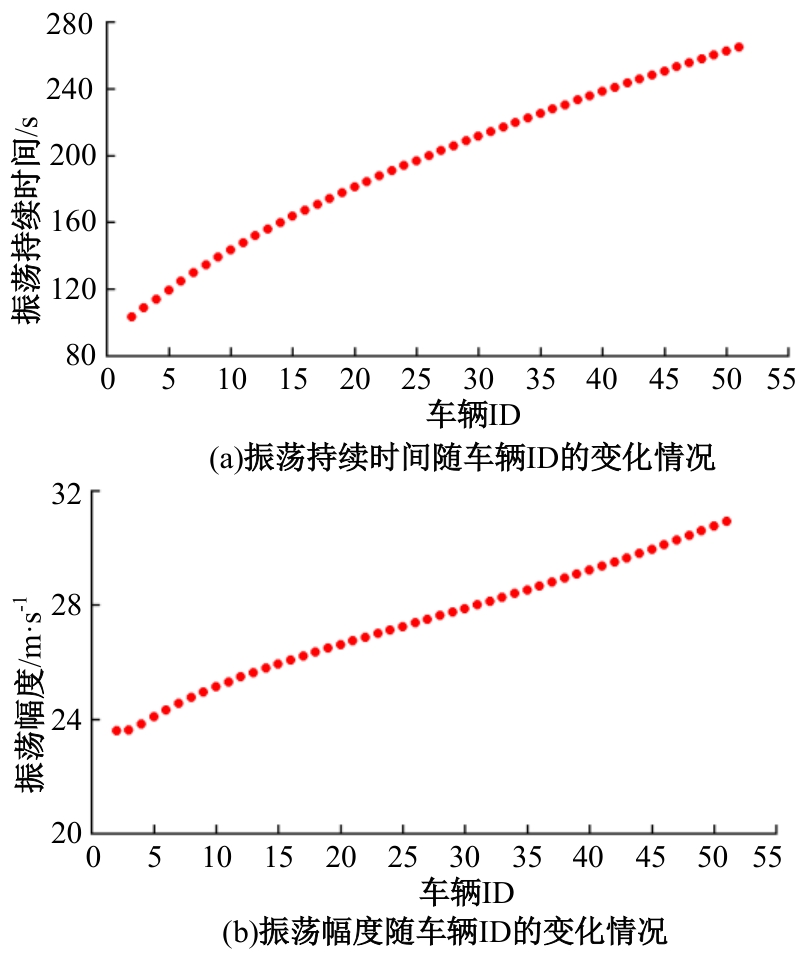
利用模拟器开展了自动驾驶接管仿真实验,采集了实验过程中的车辆轨迹数据,利用高斯混合模型将接管后的驾驶状态划分为稳定与不稳定,并确定了被试的驾驶能力恢复时间。随后,利用遗传算法标定了驾驶能力恢复阶段与正常手动驾驶阶段的跟驰模型参数,并通过数值仿真技术,研究了不同扰动强度下驾驶能力恢复时长对交通振荡特性的影响规律。结果表明:接管后驾驶人平均需要27.25 s来恢复驾驶能力;驾驶能力恢复阶段的期望加速度与减速度大于正常手动驾驶阶段,而期望速度要小于正常手动驾驶阶段;接管会引起交通振荡,振荡持续时间与驾驶能力恢复时长和扰动强度正相关,而驾驶能力恢复时长对振荡幅度无显著影响;此外,交通振荡在车队传播过程中其振幅和持续时间会被不断放大。
中图分类号:
- U471.3







| 1 | Yao Z, Hu R, Wang Y, et al. Stability analysis and the fundamental diagram for mixed connected automated and human-driven vehicles[J]. Physica A: Statistical Mechanics and its Applications, 2019, 533(C): No.121931. |
| 2 | 秦严严. 智能网联环境下异质交通流特性分析方法研究[D]. 南京: 东南大学交通学院, 2019. |
| Qin Yan-yan. Study on analytical method of heterogeneous traffic flow characteristics under connected and autonomous environment[D]. Nanjing: School of Transportation, Southeast University, 2019. | |
| 3 | 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. |
| Qin Yan-yan, Wang Hao, Wang Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. | |
| 4 | Xie D F, Zhao X M, He Z. Heterogeneous traffic mixing regular and connected vehicles: modeling and stabilization[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2060-2071. |
| 5 | Mintsis E, Lüecken L, Porfyri K, et al. Transaid deliverable 3.1——modelling, simulation and assessment of vehicle automations and automated vehicles' driver behaviour in mixed traffic[R]. Berlin: German Aerospace Center, 2018. |
| 6 | 丁子健. 新型混合车流中车辆接管对交通振荡的影响机理及车辆协同控制[D]. 南京: 东南大学交通学院, 2021. |
| Ding Zi-jian. The impact mechanism of the takeover of autonomous vehicle on traffic oscillation in the mixed traffic flow and the coordinated control of vehicles[D]. Nanjing: School of Transportation, Southeast University, 2021. | |
| 7 | 胡宏宇, 张慧珺, 姚荣涵, 等. L3级自动驾驶接管过程驾驶员情景意识研究 [J]. 吉林大学学报:工学版, 2024,54(2): 410-418. |
| Hu Hong-yu, Zhang Hui-jun, Yao Rong-han, et al. Driver's situational awareness in takeover process of L3 automated vehicles[J]. Journal of Jilin University (Engineering and Technology Edition), 2024,54(2):410-418. | |
| 8 | 王琳岩, 张慧珺, 胡宏宇. 驾驶经验对L3级自动驾驶接管绩效的影响[J]. 汽车工程, 2022, 44(10): 1521-1526. |
| Wang Lin-yan, Zhang Hui-jun, Hu Hong-yu. Effect of driving experience on take-over performance of L3 automatic driving[J]. Automotive Engineering, 2022, 44(10): 1521-1526. | |
| 9 | Lücken L, Mintsis E, Kallirroi N P, et al. From automated to manual-modeling control transitions with SUMO[C]∥SUMO User Conference 2019, Berlin-Adlershof, Germany, 2019 :124-244. |
| 10 | 李晓赫, 吴建平, 彭德品. L3级自动驾驶对交通流特性的影响分析[C]∥第三十三届中国仿真大会, 北京, 2021:572-578. |
| 11 | Liu Q, Liu J, Cai Y, et al. Exploring the impact of the takeover time for conditionally automated driving vehicles on traffic flow in highway merging area[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12):24753-24764. |
| 12 | 翟俊达, 鲁光泉, 陈发城. 自动驾驶水平对驾驶行为稳定时间的影响分析[J]. 北京航空航天大学学报, 2022, 50(11): 3477-3483. |
| Zhai Jun-da, Lu Guang-quan, Chen Fa-cheng, et al. Effect analysis of automation levels on stabilization time of driving behaviors[J]. Journal of Beijing University of Aeronautics and Astronautics,2022, 50(11): 3477-3483. | |
| 13 | Rubner Y, Tomasi C, Guibas L J. The earth mover´s distance as a metric for image retrieval[J]. International Journal of Computer Vision, 2000, 40(2): 99-121. |
| 14 | Reynolds D A. Gaussian mixture models[J]. Encyclopedia of Biometrics, 2009, 741: 659-663. |
| 15 | Dempster A, Laird N, Rubin D. Maximum likelihood from incomplete data via the EM algorithm[J]. Journal of the Royal Statistical Society, 1977, 39(1): 1-22. |
| 16 | Milanés V, Shladover S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. |
| 17 | Treiber M, Hennecke A, Helbing D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805-1824. |
| 18 | Zhu T, Wang C, Yang C, et al. Evaluation of effectiveness of speed reduction markings on driving speed in highway tunnel entrance and exit areas[J]. Promet-Traffic Transportation, 2020, 32(1): 141-152. |
| 19 | 王长帅, 徐铖铖, 邵永成, 等. 基于生存分析的自动驾驶接管时间分析[J]. 中国安全科学学报, 2023, 33(8): 142-148. |
| Wang Chang-shuai, Xu Cheng-cheng, Shao Yong-cheng, et al. Analysis of takeover time of automated driving based on survival analysis[J]. China Safety Science Journal, 2023, 33(8): 142-148. | |
| 20 | Hinton G E, Roweis S. Stochastic neighbor embedding [J]. Advances in Neural Information Processing Systems, 2002, 15:857 - 864 |
| 21 | 王雪松, 朱美新. 基于自然驾驶数据的中国驾驶人城市快速路跟驰模型标定与验证[J]. 中国公路学报, 2018, 31(9): 129-137. |
| Wang Xue-song, Zhu Mei-xin. Calibrating and validating car-following models on urban expressways for Chinese drivers using naturalistic driving data[J]. China Journal of Highway and Transport, 2018, 31(9): 129-138. | |
| 22 | Zheng Z, Ahn S, Chen D, et al. Applications of wavelet transform for analysis of freeway traffic: bottlenecks, transient traffic, and traffic oscillations[J]. Transportation Research Part B: Methodological, 2011, 45(2): 372-384. |
| [1] | 胡宏宇,张慧珺,姚荣涵,陈国迎,高菲. L3级自动驾驶接管过程驾驶员情景意识研究[J]. 吉林大学学报(工学版), 2024, 54(2): 410-418. |
| [2] | 袁伟,袁小慧,高岩,李坤宸,赵登峰,刘朝辉. 基于自然驾驶数据的电动公交踏板误操作辨识方法[J]. 吉林大学学报(工学版), 2023, 53(12): 3342-3350. |
| [3] | 吴坚,姚琳琳,朱冰,邓伟文. 基于高斯混合模型的驾驶员个人特质辨识[J]. 吉林大学学报(工学版), 2015, 45(1): 38-43. |
| [4] | 高振海, 吴涛, 赵会. 车辆虚拟跟随避撞中驾驶人制动时刻模型[J]. 吉林大学学报(工学版), 2014, 44(5): 1233-1239. |
|
||