吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (2): 410-418.doi: 10.13229/j.cnki.jdxbgxb.20220378
• 交通运输工程·土木工程 • 上一篇
L3级自动驾驶接管过程驾驶员情景意识研究
胡宏宇1( ),张慧珺1,姚荣涵2,陈国迎1,高菲1()
),张慧珺1,姚荣涵2,陈国迎1,高菲1()
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.大连理工大学 交通运输学院,大连 116024
Driver's situational awareness in takeover process of L3 automated vehicles
Hong-yu HU1(),Hui-jun ZHANG1,Rong-han YAO2,Guo-ying CHEN1,Fei GAO1()
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.School of Transportation and Logistics,Dalian University of Technology,Dalian 116024,China
摘要:
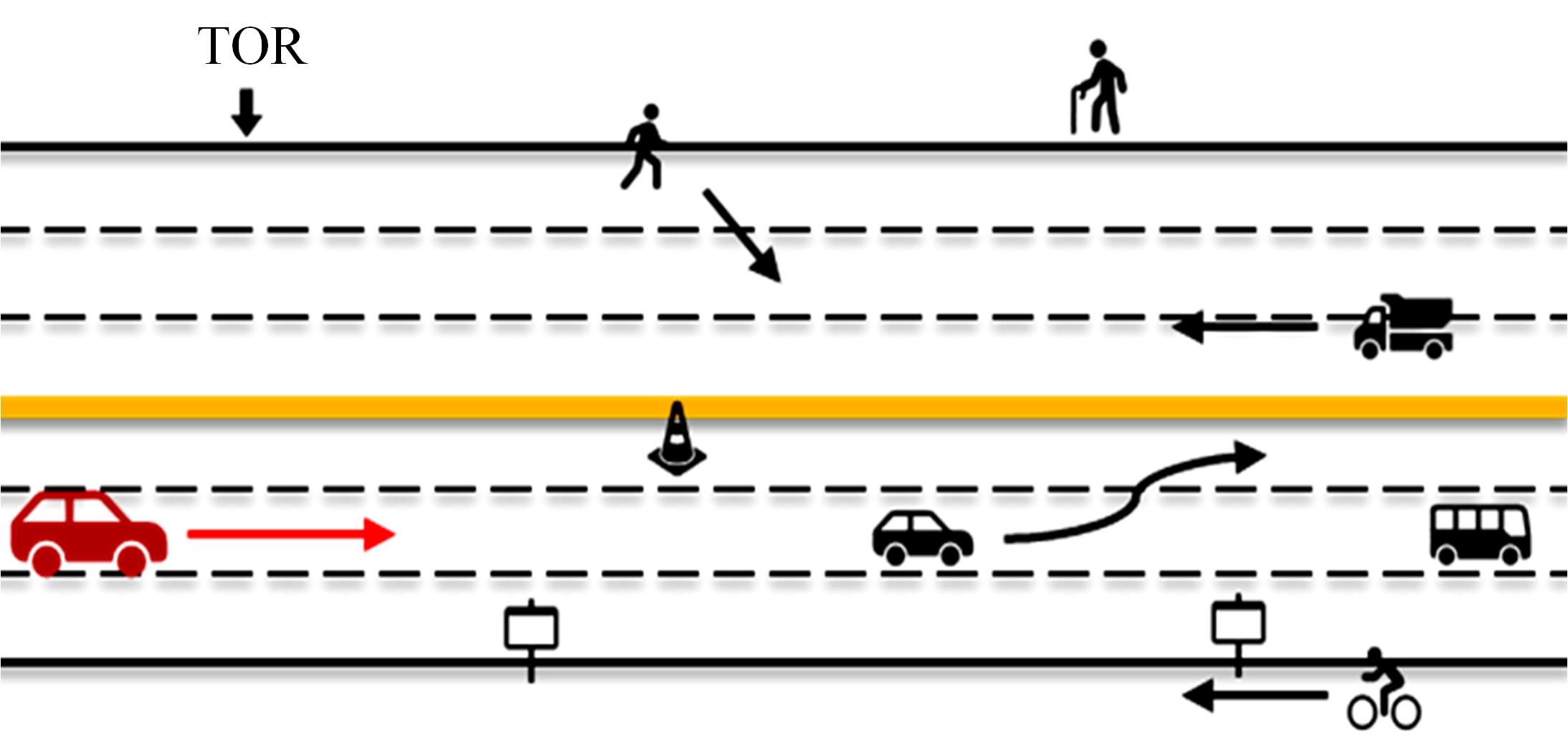
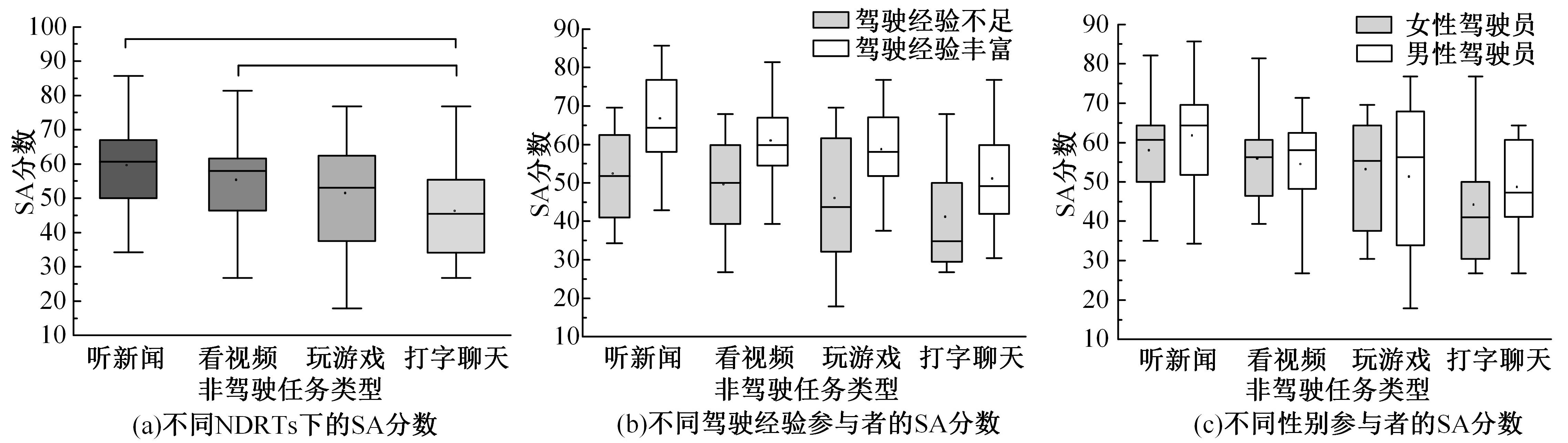
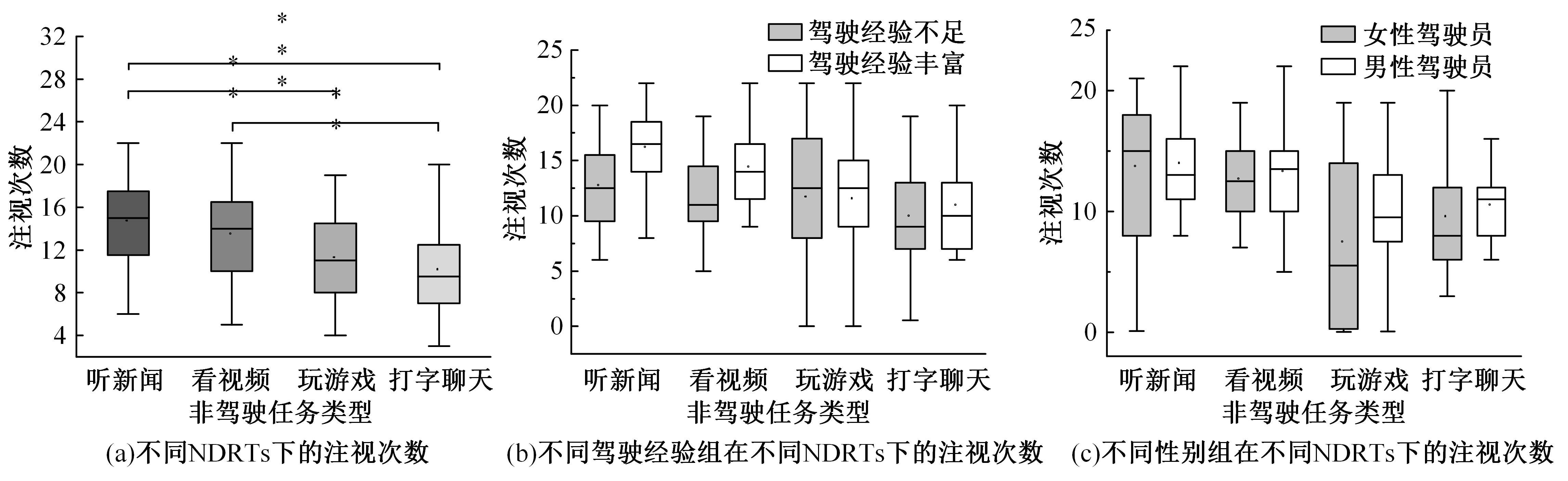
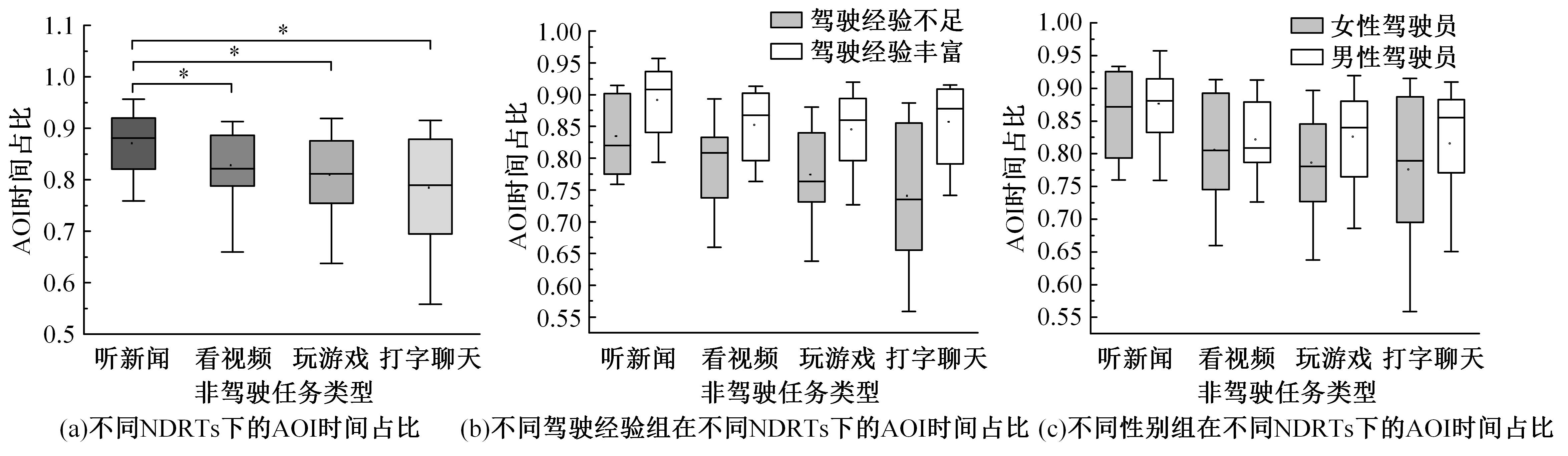
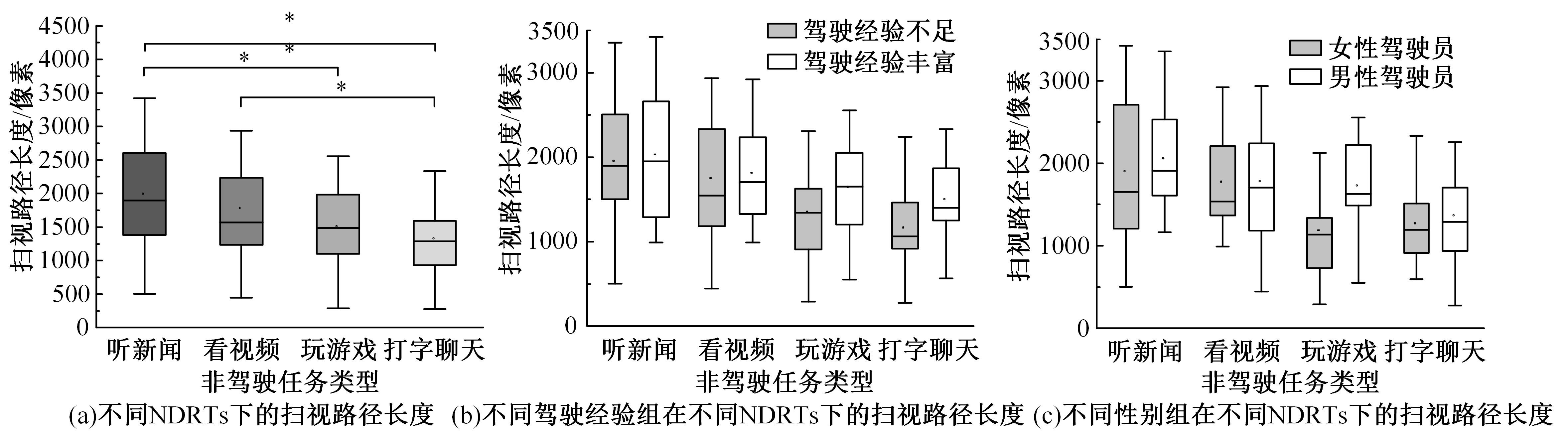
针对L3级自动驾驶驾驶员接管准备情况,进行了驾驶员在从事不同类型的非驾驶相关任务(NDRTs)下的情景意识研究。基于驾驶模拟器搭建了面向L3级自动驾驶的仿真测试场景,通过情景意识问卷与驾驶员眼动行为测量对情景意识准备情况进行讨论分析。研究结果表明:随着NDRTs占据感官模态的增多,驾驶员的注意力会更少集中在驾驶任务上,对于驾驶环境元素的关注也会相应减少,对情景意识的恢复产生负面影响。
中图分类号:
- U471.3









| 1 | SAE J3016—2021. Taxonomy and definitions for terms related to on-road motor vehicle automated driving systems [S]. |
| 2 | Dillmann J, Kurpiers C M, Pelzer J, et al. Keeping the driver in the loop through semi-automated or manual lane changes in conditionally automated driving[J]. Accident Analysis and Prevention, 2021, 162: 106397. |
| 3 | 姚荣涵, 徐文韬, 郭伟伟. 基于因子长短期记忆的驾驶人接管行为及意图识别[J]. 吉林大学学报: 工学版, 2023, 53(3): 758-771. |
| Yao Rong-han, Xu Wen-tao, Guo Wei-wei. Drivers' takeover behavior and intention recognition based on factor and long short-term memory[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(3): 758-771. | |
| 4 | 华强, 金立生, 郭柏苍, 等. 一种混行环境下驾驶人认知分心识别方法[J]. 吉林大学学报: 工学版, 2022, 52(8): 1800-1807. |
| Hua Qiang, Jin Li-sheng, Guo Bai-cang, et al. A recognition method for driver's cognitive distraction in simulated mixed traffic environment[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(8): 1800-1807. | |
| 5 | Dogan E, Rahal M C, Deborne R, et al. Transition of control in a partially automated vehicle: effects of anticipation and non-drivingrelated task involvement[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2017, 46(46): 205-215. |
| 6 | 钮建伟, 张雪梅, 孙一品, 等. 险情中驾驶人接管自动驾驶车辆的驾驶行为研究[J]. 中国公路学报, 2018, 31(6): 272-280. |
| Niu Jian-wei, Zhang Xue-mei, Sun Yi-pin, et al. Analysis of the driving behavior during the takeover of automatic driving vehicles in dangerous traffic situations[J]. China Journal of Highway and Transport, 2018, 31(6): 272-280. | |
| 7 | 王抢, 朱彤, 朱可宁, 等. 视觉与听觉次任务对驾驶人视觉的影响及差异[J]. 安全与环境学报, 2014, 14(4): 49-52. |
| Wang Qiang, Zhu Tong, Zhu Ke-ning, et al. Effects and differences of auditory and visual secondary tasks on drivers' visual[J]. Journal of Safety and Environment, 2014, 14(4): 49-52. | |
| 8 | 鲁光泉, 赵鹏云, 王兆杰, 等. 自动驾驶中视觉次任务对年轻驾驶人接管时间的影响[J]. 中国公路学报, 2018, 31(4): 165-171. |
| Lu Guang-quan, Zhao Peng-yun, Wang Zhao-jie, et al. Impact of visual secondary task on young drivers' take-over time in automated driving[J]. China Journal of Highway and Transport, 2018, 31(4): 165-171. | |
| 9 | Zeeb K, Buchner A, Schrauf M. What determines the take-over time? An integrated model approach of driver take-over after automated driving[J]. Accident Analysis & Prevention, 2015,78: 212-221. |
| 10 | Endsley M R. Measurement of situation awareness in dynamic systems[J]. Human Factors, 1995, 37: 65-84. |
| 11 | Kass S J, Cole K S, Stanny C J. Effects of distraction and experience on situation awareness and simulated driving[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2007, 10(4): 321-329. |
| 12 | Scott-Parker B, Regt T D, Jones C, et al. The situation awareness of young drivers, middle-aged drivers, and older drivers: same but different? [J]. Case Studies on Transport Policy, 2020, 8(1): 206-214. |
| 13 | Zhang T, Yang J, Liang N, et al. Physiological measurements of situation awareness: a systematic review[J]. Human Factors, 2020, 65(5): 737-758. |
| 14 | Briggs G F, Hole G J, Turner J A J, et al. The impact of attentional set and situation awareness on dual tasking driving performance[J]. Transportation Research Part F-Traffic Psychology and Behaviour, 2018, 57: 36-47. |
| 15 | Liang N, Yang J, Yu D, et al. Using eye-tracking to investigate the effects of pre-takeover visual engagement on situation awareness during automated driving[J]. Accident Analysis & Prevention, 2021, 157: 106-143. |
| [1] | 聂建军,侯军凯,解晓琳,鄢鸿桢. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报(工学版), 2024, 54(2): 356-364. |
| [2] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
| [3] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [4] | 李旭东,王新宇,田程,张新峰,牛治慧,赵志强. 基于用户关联的车辆耐久性载荷谱编制[J]. 吉林大学学报(工学版), 2024, 54(1): 66-75. |
| [5] | 王铁,李旭东,田程,赵宏伟. 基于多轴载荷投影构建轮辋双轴疲劳损伤模型[J]. 吉林大学学报(工学版), 2024, 54(1): 99-104. |
| [6] | 吴骁,史文库,郭年程,赵燕燕,陈志勇,李鑫鹏,孙卓,刘健. 基于Ease off的准双曲面齿轮多目标优化[J]. 吉林大学学报(工学版), 2024, 54(1): 76-85. |
| [7] | 张健,李青扬,李丹,姜夏,雷艳红,季亚平. 基于深度强化学习的自动驾驶车辆专用道汇入引导[J]. 吉林大学学报(工学版), 2023, 53(9): 2508-2518. |
| [8] | 陈兆玮,蒲前华. 弹性车轮对大跨斜拉桥车桥耦合振动的抑制特性[J]. 吉林大学学报(工学版), 2023, 53(9): 2519-2532. |
| [9] | 刘平义,李晓婷,高偌霖,李海涛,魏文军,王亚. 车辆侧倾驱动机构设计与试验[J]. 吉林大学学报(工学版), 2023, 53(8): 2185-2192. |
| [10] | 黄学劲,钟锦星,路京雨,赵霁,肖伟,袁新枚. 基于用户画像的电动汽车充电负荷预测方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2193-2200. |
| [11] | 张树培,夏明悦,张玮,陈钊,陈义祥. 考虑非线性刚度的间隙球铰碰撞动力学建模与仿真[J]. 吉林大学学报(工学版), 2023, 53(8): 2227-2235. |
| [12] | 陈辉,邵亚军. 基于惯性基准多传感器耦合的路面谱测量方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2254-2262. |
| [13] | 陈磊,王杨,董志圣,宋亚奇. 一种基于转向意图的车辆敏捷性控制策略[J]. 吉林大学学报(工学版), 2023, 53(5): 1257-1263. |
| [14] | 陈鑫,张冠宸,赵康明,王佳宁,杨立飞,司徒德蓉. 搭接焊缝对铝合金焊接结构轻量化设计的影响[J]. 吉林大学学报(工学版), 2023, 53(5): 1282-1288. |
| [15] | 张勇,毛凤朝,刘水长,王青妤,潘神功,曾广胜. 基于Laplacian算法的汽车外流场畸变网格优化[J]. 吉林大学学报(工学版), 2023, 53(5): 1289-1296. |
|
||