Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (2): 569-575.doi: 10.13229/j.cnki.jdxbgxb20210623
Previous Articles Next Articles
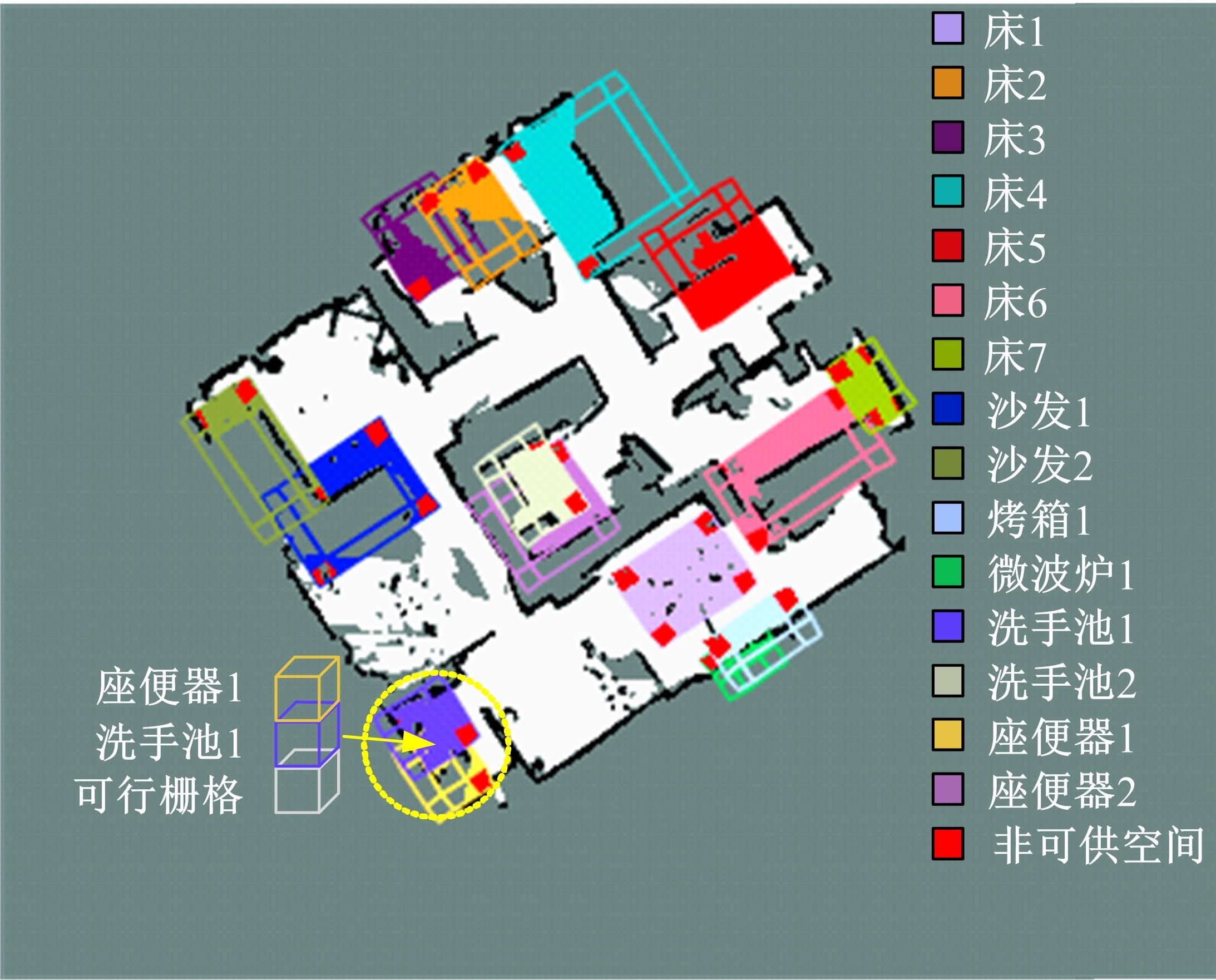
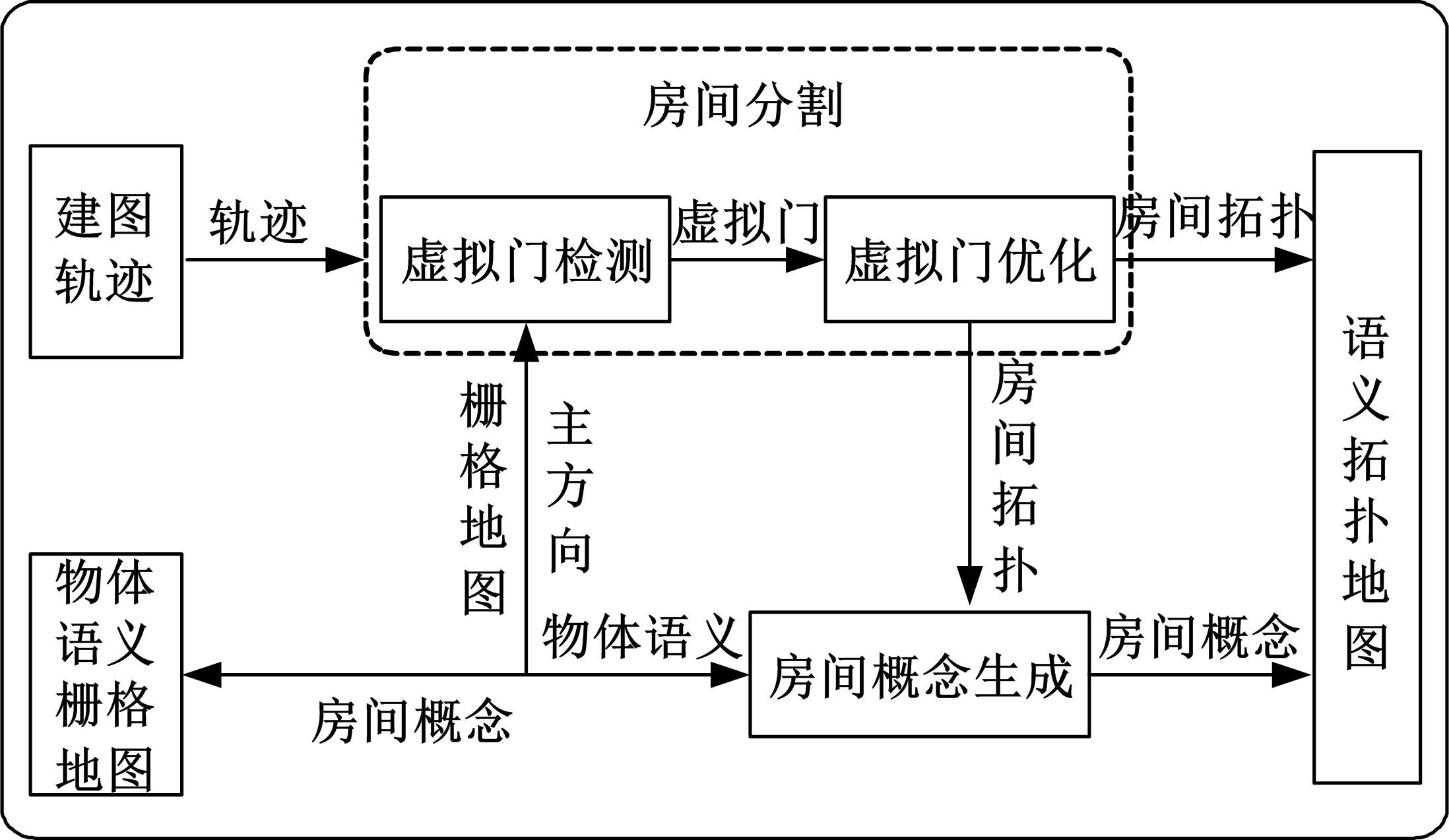
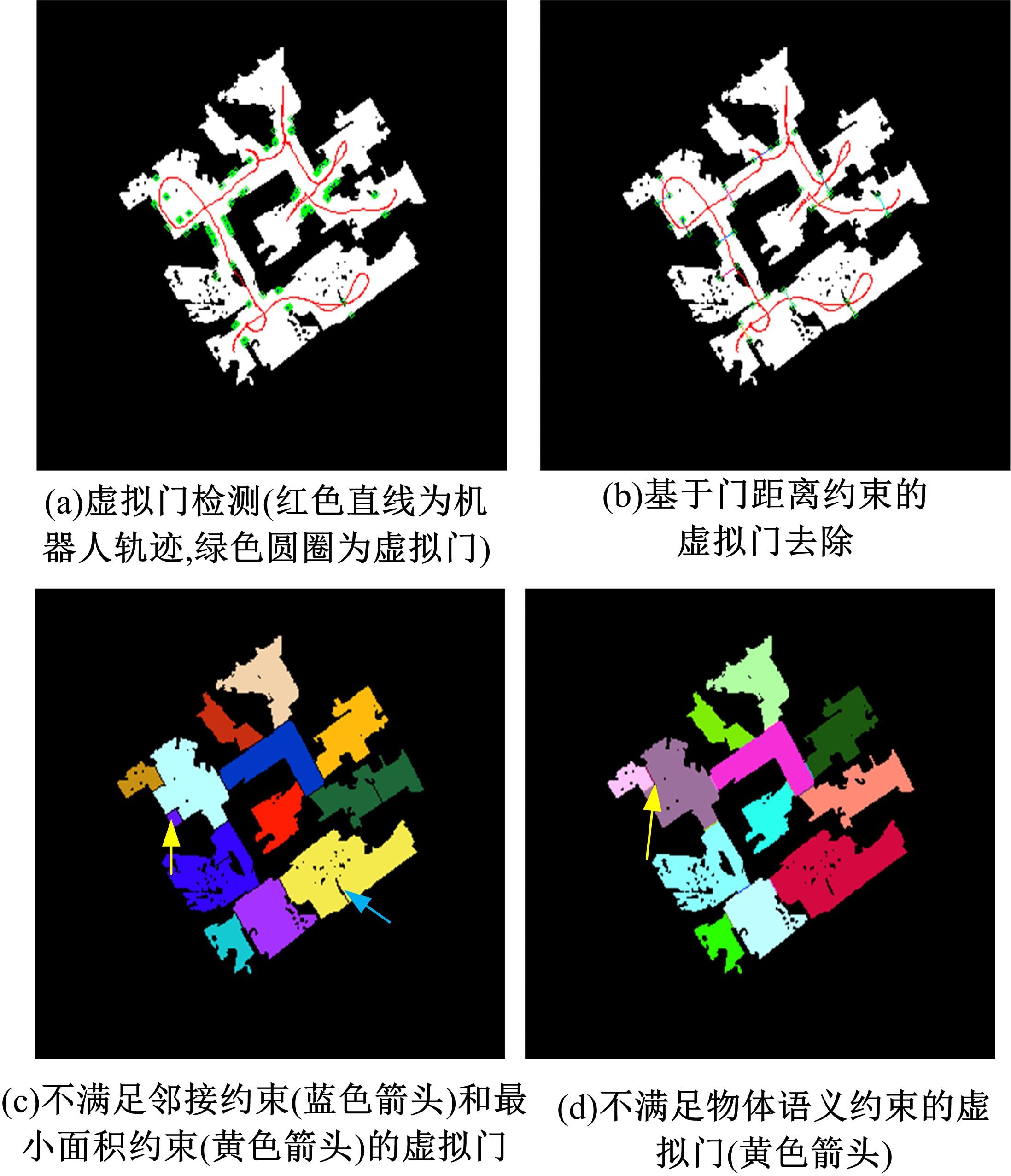
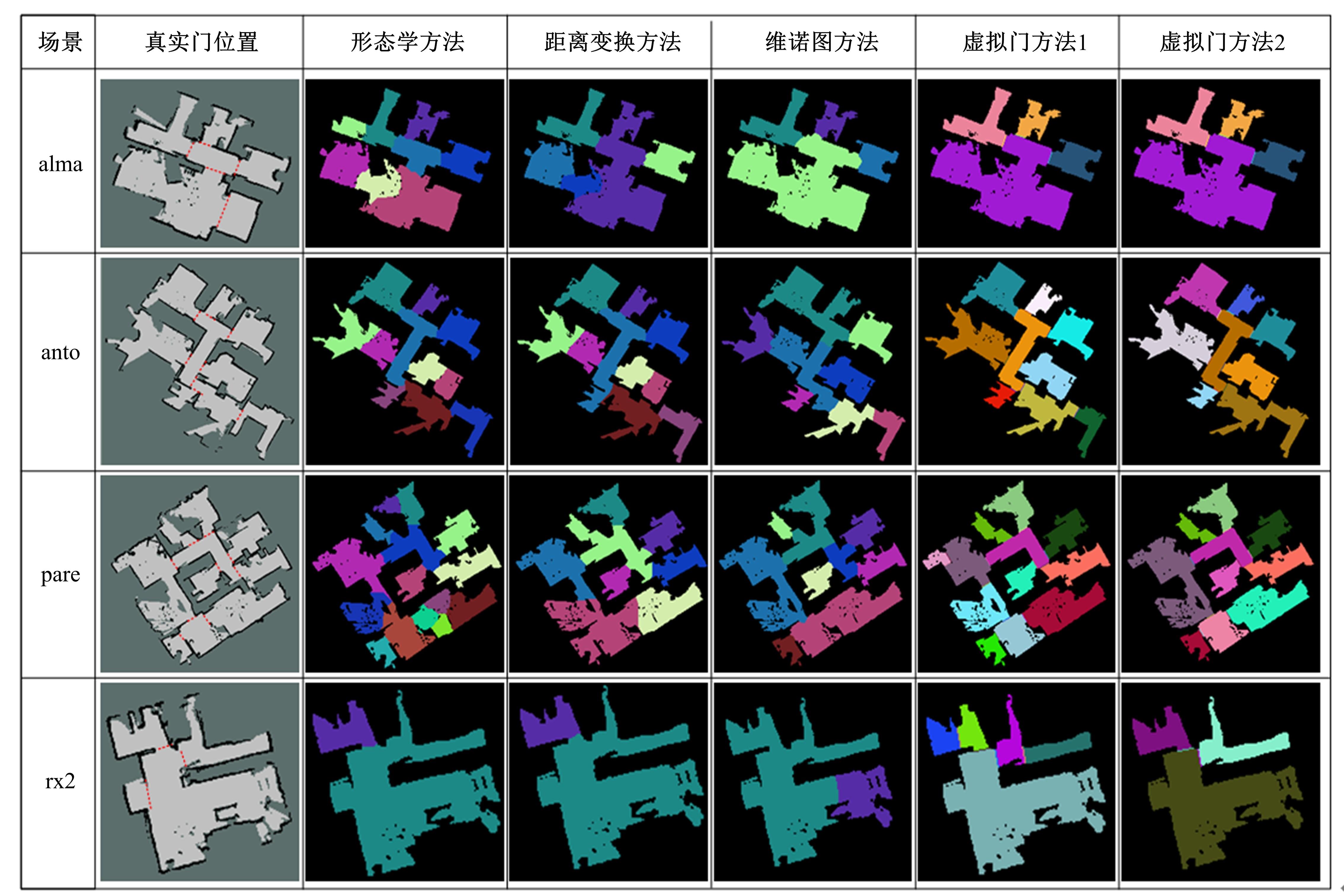
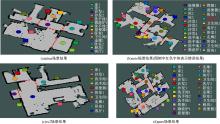
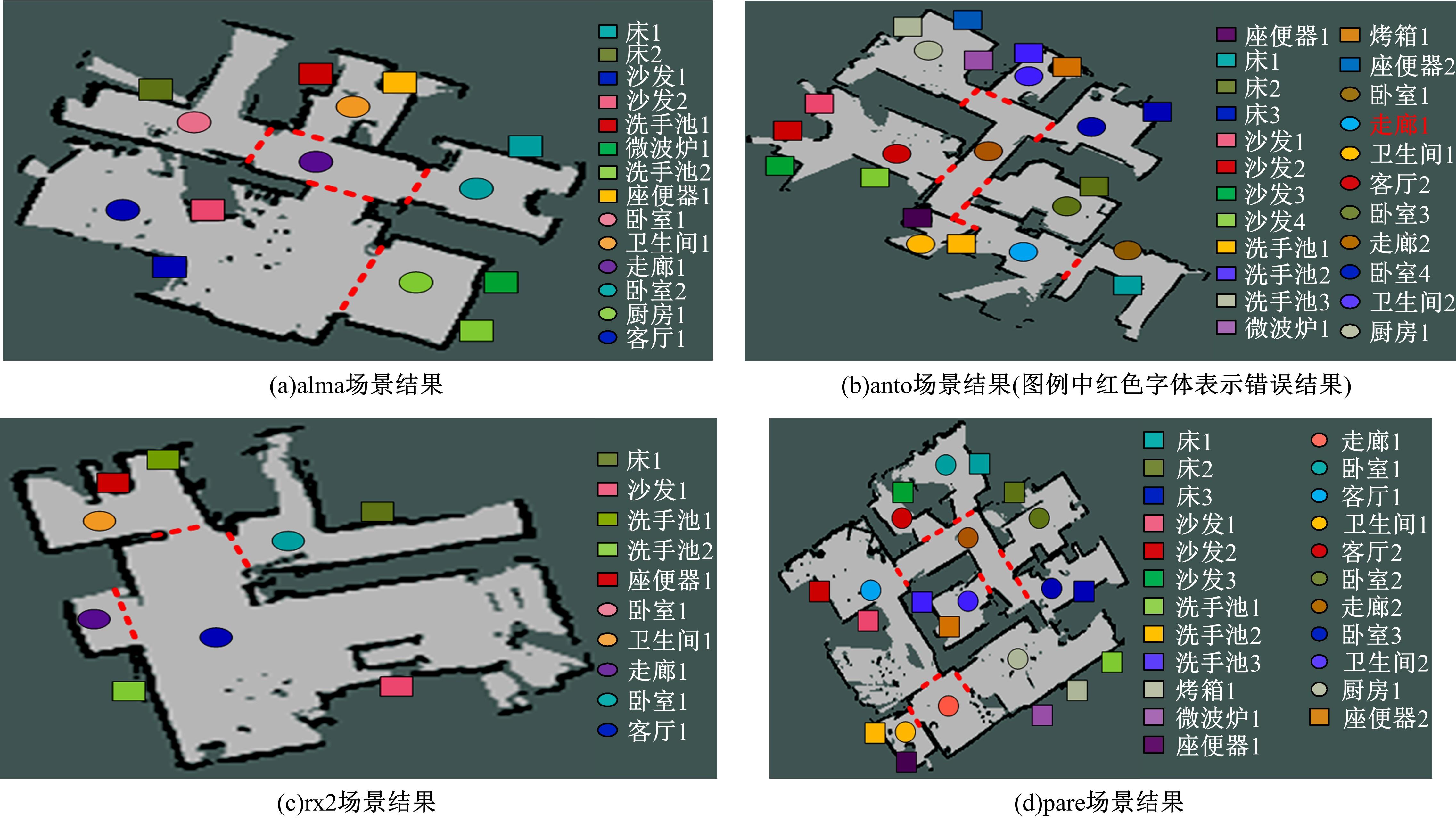
Semantic topological map building with object semantic grid map
Xian-yu QI1( ),Wei WANG2,Lin WANG1,Yu-fei ZHAO1,Yan-peng DONG1
),Wei WANG2,Lin WANG1,Yu-fei ZHAO1,Yan-peng DONG1
- 1.Beijing Institute of Mechanical Equipment,Beijing 100854,China
2.School of Mechanical Engineering and Automation,Beijing University of Aeronautics and Astronautics,Beijing 100191,China
CLC Number:
- TP242.6




| 1 | Qi X, Wang W, Guo L, et al. Building a Plutchik's wheel inspired affective model for social robots[J]. Journal of Bionic Engineering, 2019, 16(2): 209-221. |
| 2 | 李嘉菲, 孙小玉.基于谱分解的不确定数据聚类方法[J].吉林大学学报:工学版, 2017, 47(5): 1604-1611. |
| Li Jia-fei, Sun Xiao-yu. Clustering method for uncertain data based on spectral decomposition[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(5): 1604-1611. | |
| 3 | Bormann R, Jordan F, Li W, et al. Room segmentation: survey, implementation, and analysis[C]∥IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 2016: 1019-1026. |
| 4 | Pronobis A, Jensfelt P. Large-scale semantic mapping and reasoning with heterogeneous modalities[C]∥IEEE International Conference on Robotics and Automation, Saint Paul, USA, 2012: 3515-3522. |
| 5 | Zender H, Martínez M O, Jensfelt P, et al. Conceptual spatial representations for indoor mobile robots[J]. Robotics and Autonomous Systems, 2008, 56(6): 493-502. |
| 6 | Joo K, Lee T K, Baek S, et al. Generating topological map from occupancy grid-map using virtual door detection[C]∥IEEE Congress on Evolutionary Computation, Barcelona, Spain, 2010: 1-6. |
| 7 | 祁贤雨, 王巍, 张啸宇, 等. 基于虚拟门检测的室内拓扑地图构建[J]. 吉林大学学报: 工学版, 2020, 50(3): 258-264. |
| Qi Xi-yu, Wang Wei, Zhang Xiao-yu, et al. Indoor topological map building with virtual door detection[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(3): 258-264. | |
| 8 | Gemignani G, Capobianco R, Bastianelli E,et al.Living with robots: interactive environmental knowledge acquisition[J]. Robotics and Autonomous Systems, 2016, 78: 1-16. |
| 9 | Espinace P, Kollar T F, Soto A, et al. Indoor scene recognition through object detection[C]∥IEEE International Conference on Robotics and Automation, Alaska, USA, 2010: 1406-1413. |
| 10 | Fernandez-Chaves D, Ruiz-Sarmiento J R, Petkov N, et al. From object detection to room categorization in robotics[C]∥Proceedings of the 3rd International Conference on Applications of Intelligent Systems, Las Palmas de Gran Canaria, Spain, 2020: 1-6. |
| 11 | Hiller M, Chen Q, Particke F, et al. Learning topometric semantic maps from occupancy grids[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 2019: 4190-4197. |
| 12 | Zheng K, Pronobis A. From pixels to buildings: end-to-end probabilistic deep networks for large-scale semantic mapping[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 2019: 3511-3518. |
| 13 | Qi X, Wang W, Liao Z, et al. Object semantic grid mapping with 2D LiDAR and RGB-D camera for domestic robot navigation[J]. Applied Sciences, 2020,10(17): 10175782. |
| 14 | Ruiz-Sarmiento J R, Galindo C, Gonzalez-Jimenez J. Robot@Home, a robotic dataset for semantic mapping of home environments[J]. The International Journal of Robotics Research, 2017, 36(2): 131-141. |
| [1] | Xiao-hu SHI,Jia-qi WU,Chun-guo WU,Shi CHENG,Xiao-hui WENG,Zhi-yong CHANG. Residual network based curve enhanced lane detection method [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 584-592. |
| [2] | Peng GUO,Wen-chao ZHAO,Kun LEI. Dual⁃resource constrained flexible job shop optimal scheduling based on an improved Jaya algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 480-487. |
| [3] | Jin-Zhen Liu,Guo-Hui Gao,Hui Xiong. Multi⁃scale attention network for brain tissue segmentation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 576-583. |
| [4] | Gui-he QIN,Jun-feng HUANG,Ming-hui SUN. Text input based on two⁃handed keyboard in virtual environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1881-1888. |
| [5] | Fu-heng QU,Tian-yu DING,Yang LU,Yong YANG,Ya-ting HU. Fast image codeword search algorithm based on neighborhood similarity [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1865-1871. |
| [6] | Tian BAI,Ming-wei XU,Si-ming LIU,Ji-an ZHANG,Zhe WANG. Dispute focus identification of pleading text based on deep neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1872-1880. |
| [7] | Feng-feng ZHOU,Hai-yang ZHU. SEE: sense EEG⁃based emotion algorithm via three⁃step feature selection strategy [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1834-1841. |
| [8] | Feng-feng ZHOU,Yi-chi ZHANG. Unsupervised feature engineering algorithm BioSAE based on sparse autoencoder [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1645-1656. |
| [9] | Jun WANG,Yan-hui XU,Li LI. Data fusion privacy protection method with low energy consumption and integrity verification [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1657-1665. |
| [10] | Yao-long KANG,Li-lu FENG,Jing-an ZHANG,Fu CHEN. Outlier mining algorithm for high dimensional categorical data streams based on spectral clustering [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1422-1427. |
| [11] | Wen-jun WANG,Yin-feng YU. Automatic completion algorithm for missing links in nowledge graph considering data sparsity [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1428-1433. |
| [12] | Xue-yun CHEN,Xue-yu BEI,Qu YAO,Xin JIN. Pedestrian segmentation and detection in multi-scene based on G-UNet [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 925-933. |
| [13] | Shi-min FANG. Multiple source data selective integration algorithm based on frequent pattern tree [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 885-890. |
| [14] | Da-xiang LI,Meng-si CHEN,Ying LIU. Spontaneous micro-expression recognition based on STA-LSTM [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 897-909. |
| [15] | Xiao-hui WEI,Yan-wei MIAO,Xing-wang WANG. Rhombus sketch: adaptive and more accurate sketch for streaming data [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 874-884. |
|