Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (5): 1311-1322.doi: 10.13229/j.cnki.jdxbgxb.20220754
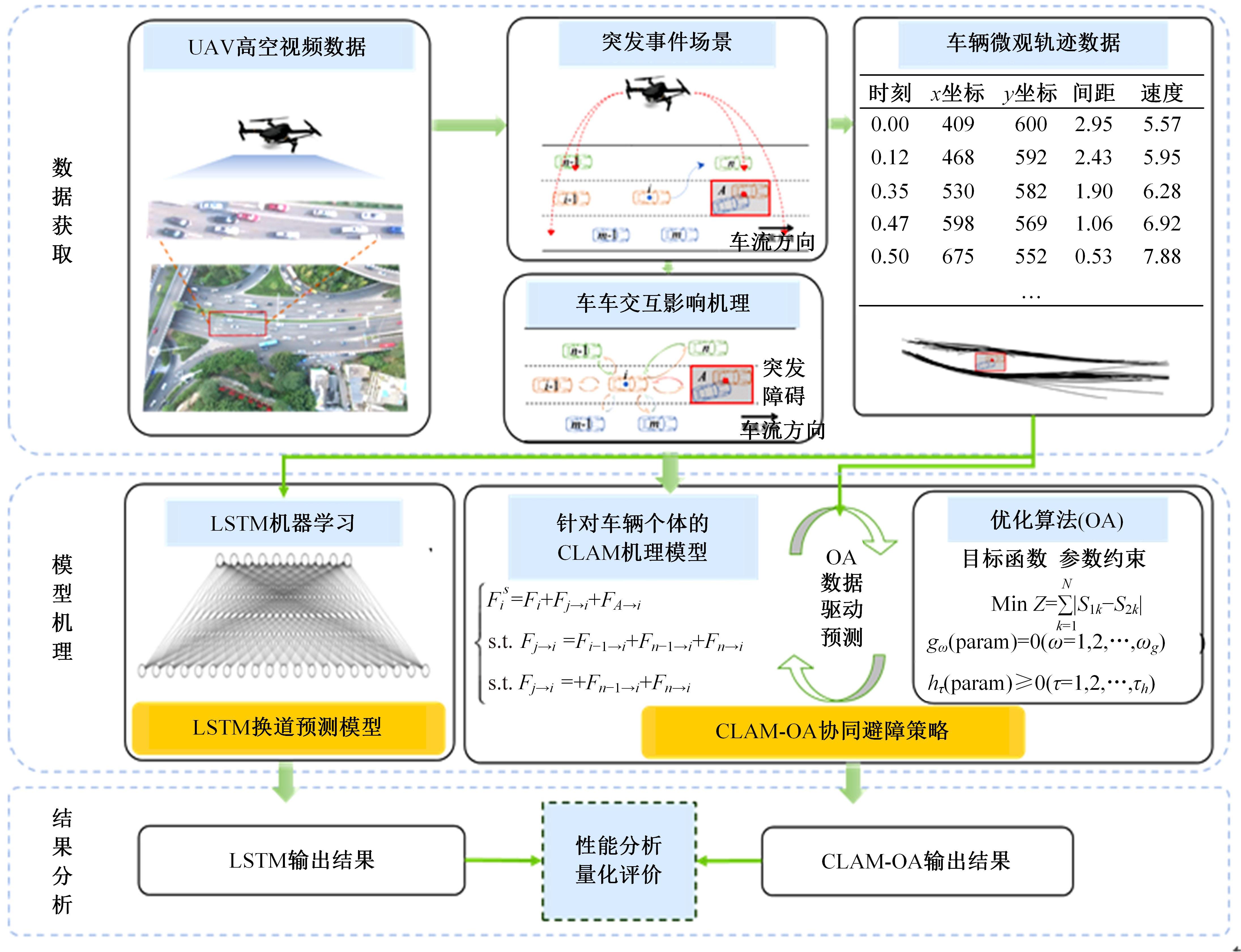
Vehicle cooperative obstacle avoidance strategy driven by CLAM model and trajectory data
Ya-qin QIN( ),Zheng-fu QIAN,Ji-ming XIE()
),Zheng-fu QIAN,Ji-ming XIE()
- Faculty of Transportation Engineering,Kunming University of Science and Technology,Kunming 650500,China
CLC Number:
- U491


| 1 | Wang Z, Shi X W, Zhao X M, et al. Modeling decentralized mandatory lane change for connected and autonomous vehicles: an analytical method[J]. Transportation Research Part C: Emerging Technologies, 2021, 133: No. 103441. |
| 2 | Aradi S. Survey of deep reinforcement learning for motion planning of autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(2): 740-759. |
| 3 | Liu Q X, Xu S H, Lu C, et al. Early recognition of driving intention for lane change based on Recurrent Hidden Semi-Markov model[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10545-10557. |
| 4 | Wang H, Lu B, Li J, et al. Risk assessment and mitigation in local path planning for autonomous vehicles with LSTM based predictive model[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 2738-2749. |
| 5 | Wang J J, Li Y L, Gao R X, et al. Hybrid physics-based and data-driven models for smart manufacturing: modelling, simulation, and explainability[J]. Journal of Manufacturing Systems, 2022, 63: 381-391. |
| 6 | 来飞, 叶心. 汽车高速行驶时自动紧急转向避撞的前馈与反馈跟踪控制的研究[J]. 汽车工程, 2020, 42(10): 1404-1411. |
| Lai Fei, Ye Xin. Research on feedforward and feedback tracking control for automatic emergency steering collision avoidance in vehicle high-speed driving[J]. Automotive Engineering, 2020, 42(10): 1404-1411. | |
| 7 | 王国栋, 刘立, 孟宇, 等. 一体式车辆避撞轨迹规划与跟踪控制[J]. 交通运输系统工程与信息, 2022, 22(2): 127-136, 162. |
| Wang Guo-dong, Liu Li, Meng Yu, et al. Integrated control of trajectory planning and tracking for vehicle collision avoidance[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(2): 127-136, 162. | |
| 8 | 彭涛, 苏丽俐, 关志伟, 等. 高速公路弯道路段车辆紧急避撞安全换道模型[J]. 汽车工程, 2019, 41(9): 1013-1020. |
| Peng Tao, Su Li-li, Guan Zhi-wei, et al. A safe lane change model for vehicle emergent collision avoidance on curved section of highway[J]. Automotive Engineering, 2019, 41(9): 1013-1020. | |
| 9 | 韩月起, 张凯, 宾洋, 等. 基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法[J]. 自动化学报, 2020, 46(1): 153-167. |
| Han Yue-qi, Zhang Kai, Yang Bin, et al. Convex approximation based a voidance theory and path planning MPC for driver-less vehicles[J]. Acta Automatica Sinica, 2020, 46(1): 153-167. | |
| 10 | He X K, Liu Y L, Lyu C, et al. Emergency steering control of autonomous vehicle for collision avoidance and stabilisation[J]. Vehicle System Dynamics, 2019, 57(8): 1163-1187. |
| 11 | Lee K, Kum D. Collision avoidance/mitigation system: motion planning of autonomous vehicle via predictive occupancy map[J]. IEEE Access, 2019, 7: 52846-52857. |
| 12 | 郭景华, 何智飞, 罗禹贡, 等. 人机混驾环境下基于深度学习的车辆切入轨迹预测[J]. 汽车工程, 2022, 44(2): 153-160, 214. |
| Guo Jing-hua, He Zhi-fei, Luo Yu-gong, et al. Vehicle cut-in trajectory prediction based on deep learning in a human-machine mixed driving environment[J]. Automotive Engineering, 2022, 44(2): 153-160, 214. | |
| 13 | 秦雅琴, 钱正富, 谢济铭, 等. 基于社会力的交织区突发瓶颈段协同换道决策模型[J]. 华南理工大学学报:自然科学版, 2022, 50(7): 66-75. |
| Qin Ya-qin, Qian Zheng-fu, Xie Ji-ming, et al. Cooperative lane change decision-making model of bottleneck emergency section in weaving area based on social force[J]. Journal of South China University of Technology (Natural Science Edition), 2022, 50(7): 66-75. | |
| 14 | Yang D, Zhou X, Su G, et al. Model and simulation of the heterogeneous traffic flow of the urban signalized intersection with an island work zone[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(5): 1719-1727. |
| 15 | Yang X L, Yang X X, Li Y X, et al. Obstacle avoidance in the improved social force model based on ant colony optimization during pedestrian evacuation[J]. Physica A: Statistical Mechanics and its Applications, 2021, 583: No. 126256. |
| 16 | Liu S, Wang X S, Hassanin O, et al. Calibration and evaluation of responsibility-sensitive safety (RSS) in automated vehicle performance during cut-in scenarios[J]. Transportation Research Part C: Emerging Technologies, 2021, 125: No. 103037. |
| 17 | Katoch S, Chauhan S S, Kumar V. A review on genetic algorithm: past, present, and future[J]. Multimedia Tools and Applications, 2021, 80(5): 8091-8126. |
| 18 | 谢济铭, 彭博, 秦雅琴. 基于换道概率分布的多车道交织区元胞自动机模型[J]. 交通运输系统工程与信息, 2022, 22(3): 276-285. |
| Xie Ji-ming, Peng Bo, Qin Ya-qin. Cellular automata model of multi-lane weaving area based on lane-changing probability distribution[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(3): 276-285. |
| [1] | Hong-tao LI,Lin-hong WANG,Jun-da LI. Influence of lighting and speed limit on visual search ability at highway intersections [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2287-2297. |
| [2] | Wei-tiao WU,Kun ZENG,Wei ZHOU,Peng LI,Wen-zhou JIN. Deep learning method for bus passenger flow prediction based on multi-source data and surrogate-based optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(7): 2001-2015. |
| [3] | Zhen-liang LIU,Cun-bao ZHAO,Yun-peng WU,Mi-na MA,Long-shuang MA. Life⁃cycle seismic resilience assessment of highway bridge networks using data⁃driven method [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(6): 1695-1701. |
| [4] | Hong-fei JIA,Ying-jun XU,Li-li YANG,Nan WANG. League member selection and benefit distribution of commercial vehicles multi⁃modal transportation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1060-1069. |
| [5] | Chao SUN,Hao-wei YIN,Wen-yun TANG,Zhao-ming CHU. Sensor deployment strategy and expansion inference of mobile phone data for traffic demand estimation [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1070-1077. |
| [6] | Zhi-wei LIU,Zheng-yun SONG,Jian-rong LIU. Impact of shared autonomous vehicles on choice of subway station connection methods [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3424-3431. |
| [7] | Jin XU,Yan-peng WANG,Hai-yuan CHEN,Xiao-bo ZHANG,Cun-shu PAN. Longitudinal driving characteristics and operating speed prediction model of cars on hairpin curves of mountainous roads [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3432-3445. |
| [8] | Wen-jing WU,Kang-bei XIONG,Li-li YANG,Si-xu PU. Optimization of bus transfer preferential strategy in passenger corridor based on mental account theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3113-3121. |
| [9] | Xiu-feng CHEN,Yu-tong GUO,Yue-chen WU,Da-yi QU,Meng-yuan GAO. Multi-objective optimization of traffic signal timings based on dandelion algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3122-3129. |
| [10] | Lang SONG,Jian WANG,Bin-yu YANG,Yong ZHU. Signal timing optimization model for left-turn intersection using double-exit lanes [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 2826-2838. |
| [11] | Hui-qiu LU,Feng ZHAO,Bo XIE,Yan-tao TIAN. Driver's lane change intention recognition in snow and ice environment based on neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 273-284. |
| [12] | Wen-bo HUANG,Yan-yan CHEN,Shu-shan CHAI. Decision⁃making behavior of pedestrians in cold competition area under the intervention of mobile information [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 132-140. |
| [13] | Xian-min SONG,Shu-tian YANG,Ming-xin LIU,Zhi-hui LI. Fluctuation characteristics and prediction method of bus travel time between stations [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1792-1799. |
| [14] | Zhi ZHENG,Bo GENG,Fu-min WANG,Jun-hong DONG,Si-si WEI. Improvement of protective ability for existing low⁃grade concrete guardrail [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1362-1374. |
| [15] | Wen-jing WU,Yong-bin ZHAN,Li-li YANG,Run-chao CHEN. Coordinated control method of variable speed limit in on⁃ramp area considering safety distance [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1315-1323. |
|
||