Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (8): 2395-2403.doi: 10.13229/j.cnki.jdxbgxb.20211090
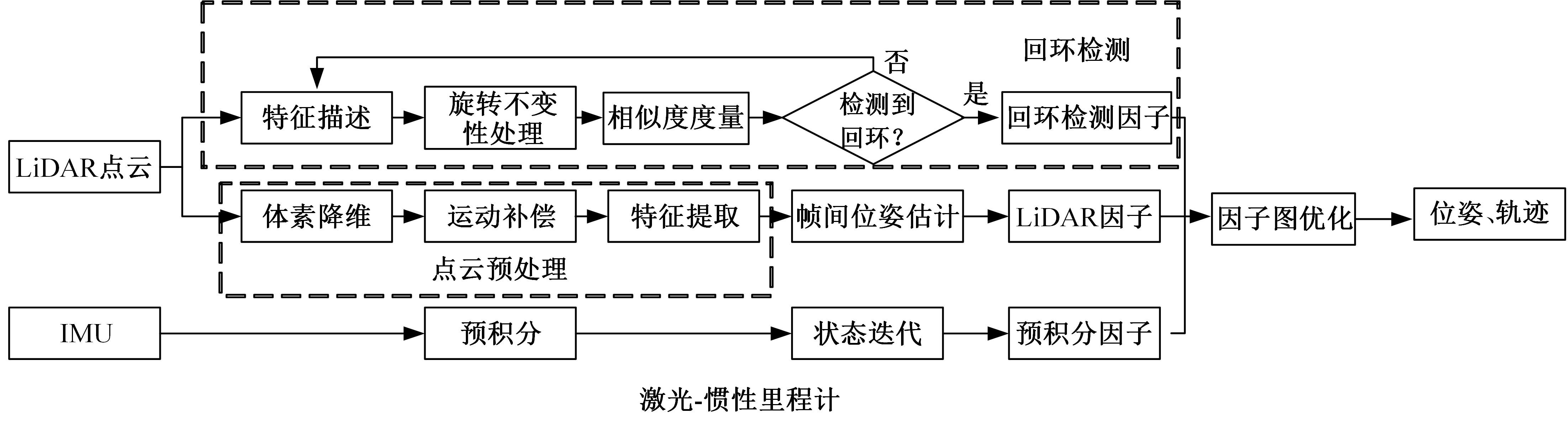
Loop-closure detection algorithm based on point cloud histogram and vehicle positioning method
Shou-tao LI1( ),Jia-lin LI1,2,Qing-yu MENG1,2,Hong-yan GUO1,2()
),Jia-lin LI1,2,Qing-yu MENG1,2,Hong-yan GUO1,2()
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
CLC Number:
- TP391.4


| 1 | 肖光年, 隽志才, 高晶鑫. 基于GPS定位数据的出行端点推断[J]. 吉林大学学报: 工学版, 2016, 46(3): 770-776. |
| Xiao Guang-nian, Zhi-cai Jun, Gao Jing-xin. Travel endpoint inference based on GPS positioning data[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(3): 770-776. | |
| 2 | Qin C, Ye H, Pranata C E, et al. Lins: a lidar-inertial state estimator for robust and efficient navigation[C]∥IEEE International Conference on Robotics and Automation, Paris, 2020: 8899-8906. |
| 3 | 兰凤崇, 李继文, 陈吉清. 面向动态场景复合深度学习与并行计算的DG-SLAM算法[J]. 吉林大学学报: 工学版, 2021, 51(4): 1437-1446. |
| Lan Feng-chong, Li Ji-wen, Chen Ji-qing. DG-SLAM algorithm for dynamic scene compound deep learning and parallel computing[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1437-1446. | |
| 4 | Xie G, Zong Q, Zhang X, et al. Loosely-coupled lidar-inertial odometry and mapping in real time[J]. International Journal of Intelligent Robotics and Applications, 2021, 5(2): 119-129. |
| 5 | Zhang J, Singh S. LOAM: lidar odometry and mapping in real-time[J]. Robotics: Science and Systems. 2014, 2(9) : 1-9. |
| 6 | Chen P, Shi W, Bao S, et al. Low-drift odometry, mapping and ground segmentation using a backpack LiDAR system[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7285-7292. |
| 7 | 宋锐, 方勇纯, 刘辉. 基于LiDAR/INS的野外移动机器人组合导航方法[J]. 智能系统学报, 2020, 15(4): 804-810. |
| Song Rui, Fang Yong-chun, Liu Hui. Integrated navigation method for mobile robots in the field based on LiDAR/INS[J]. Journal of Intelligent Systems, 2020, 15(4): 804-810. | |
| 8 | Ye H, Chen Y, Liu M. Tightly coupled 3d lidar inertial odometry and mapping[C]∥International Conference on Robotics and Automation, Shenyang, China, 2019: 3144-3150. |
| 9 | Meng Q, Guo H, Zhao X, et al. Loop-closure detection with a multiresolution point cloud histogram mode in lidar odometry and mapping for intelligent vehicles[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1307-1317. |
| 10 | Jiang K, Zhang X, Qin B, et al. Feature-based loop closure detection and optimization for LiDAR mapping[J]. SAE Technical Paper, 2020-01-5225. |
| 11 | Li K, Li M, Hanebeck U D. Towards high-performance solid-state-lidar-inertial odometry and mapping[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5167-5174. |
| 12 | 吴环宇. 基于激光雷达的智能车辆三维地图构建和定位算法研究[D].长春: 吉林大学汽车工程学院, 2020. |
| Wu Huan-yu. Research on intelligent vehicle 3D map construction and positioning algorithm based on lidar[D]. Changchun: College of Automotive Engineering, Jilin University, 2020. | |
| 13 | Shan T, Englot B, Meyers D, et al. Lio-sam: tightly-coupled lidar inertial odometry via smoothing and mapping[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, 2020: 5135-5142. |
| 14 | Zhang J, Singh S. Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2): 401-416. |
| 15 | Liu Z, Li Y, Chen C. Application of IMU pre-integration in variable-height lidar odometry[C]∥4th International Conference on Robotics and Automation Sciences, Wuhan, China, 2020: 112-116. |
| 16 | Qin T, Li P, Shen S. Vins-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. |
| 17 | Magnusson M, Andreasson H, Nüchter A, et al. Automatic appearance-based loop detection from three-dimensional laser data using the normal distributions transform[J]. Journal of Field Robotics, 2009, 26(11/12): 892-914. |
| 18 | Geiger A, Lenz P, Stiller C, et al. Vision meets robotics: The kitti dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 19 | Kim G, Park B, Kim A. 1-day learning, 1-year localization: long-term lidar localization using scan context image[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 1948-1955. |
| [1] | Chong ZHANG,Yun-feng HU,Xun GONG,Yao SUN. Design of model⁃free adaptive sliding mode controller for cathode flow of fuel cell [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2085-2095. |
| [2] | Yun-feng HU,Tong YU,Hui-ce YANG,Yao SUN. Optimal control method of fuel cell start⁃up in low temperature environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2034-2043. |
| [3] | Yuan-hong LIU,Pan-pan GUO,Yan-sheng ZHANG,Xin LI. Feature extraction of sparse graph preserving projection based on Riemannian manifold [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2268-2279. |
| [4] | De-feng HE,Jie LUO,Xiao-xiang SHU. Delay-feedback predictive cruise control of autonomous and connected vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 349-357. |
|
||