Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (9): 2874-2882.doi: 10.13229/j.cnki.jdxbgxb.20250326
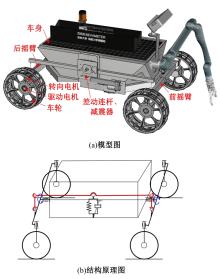
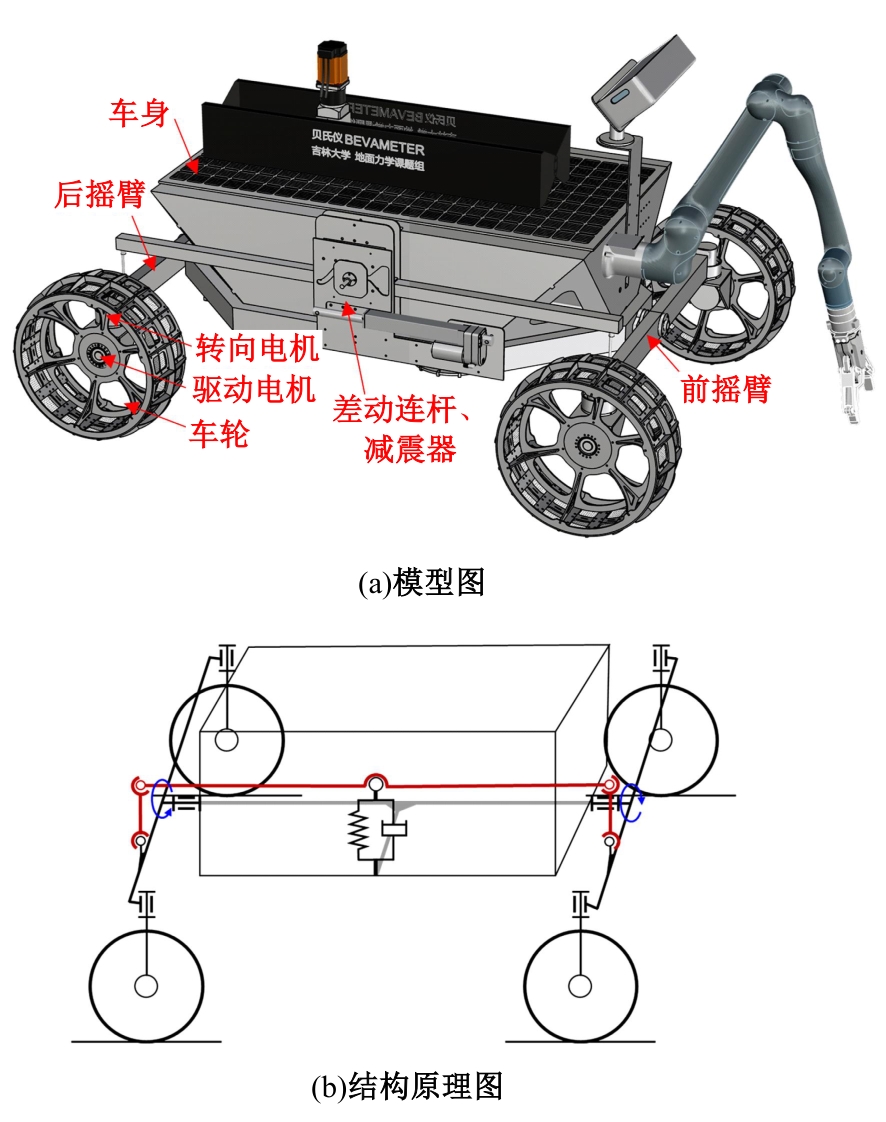
Fidelity optimization of high⁃speed planetary rover dynamics simulation based on single⁃wheel experiment
Zhi-cheng JIA1( ),Jing-fu JIN1,Xin-ju DONG1,Feng-di HAN2,Sheng JIANG2,Ying-chun QI1,Meng ZOU1()
),Jing-fu JIN1,Xin-ju DONG1,Feng-di HAN2,Sheng JIANG2,Ying-chun QI1,Meng ZOU1()
- 1.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China
2.Institute of Space Optoelectronic Technology,Changchun University of Science and Technology,Changchun 130022,China
CLC Number:
- V476

| [1] | 贾阳, 孙泽洲, 郑旸,等. 星球车技术发展综述[J]. 深空探测学报, 2020, 7(5): 419-427. |
| Jia Yang, Sun Ze-zhou, Zheng Yang,et al. Overview on development of planetary rover technology[J]. Journal of Deep Space Exploration, 2020, 7(5) : 419-427. | |
| [2] | Sanguino T D M. 50 years of rovers for planetary exploration: a retrospective review for future directions[J]. Robotics and Autonomous Systems, 2017, 94: 172-185. |
| [3] | Lu R C, Gao H B, Liu Z, et al. Design methodology, synthesis, and control strategy of the high-speed planetary rover[J]. Frontiers of Mechanical Engineering, 2024, 19(2): 245-256. |
| [4] | Rodríguez-Martínez D, van Winnendael M, Yoshida K. High-speed mobility on planetary surfaces: A technical review[J]. Journal of Field Robotics, 2019, 36(8): 1436-1455. |
| [5] | 曹剑飞, 梁常春, 王瑞, 等. 载人月球车稳定操控策略设计与优化[J]. 宇航学报, 2023, 44(9): 1379-1391. |
| Cao Jian-fei, Liang Chang-chun, Wang Rui,et al. Design and optimization of stable control strategy for manned lunar rover[J]. Journal of Astronautics, 2023, 44(9): 1379-1391. | |
| [6] | 马龙宇, 王慎泉, 蒋松, 等. 一种扭转式载人月球车及其高速移动性能研究[J]. 宇航学报, 2023, 44(9): 1392-1400. |
| Ma Long-yu, Wang Shen-quan, Jiang Song,et al. Research on a torsional manned lunar rover and its high speed mobility performance[J]. Journal of Astronautics, 2023, 44(9): 1392-1400. | |
| [7] | 党兆龙, 邹猛, 宋家锋, 等.模拟火壤结壳及其力学性能[J].吉林大学学报:工学版, 2024, 54(8): 2393-2400. |
| Dang Zhao-long, Zou Meng, Song Jia-feng,et al. Experimental on mechanical properties of simulated Mars soil crust and its crusting[J]. Journal of Jilin University (Engineering and Technology Edition), 2024, 54(8): 2393-2400. | |
| [8] | 潘冬, 李德伦, 袁宝峰, 等. 火星车系统动力学建模与仿真分析[J].深空探测学报, 2020, 7(5): 437-444. |
| Pan Dong, Li De-lun, Yuan Bao-feng,et al. Dynamics modeling and simulation analysis of Mars rover system[J]. Journal of Deep Space Exploration, 2020, 7(5): 437-444. | |
| [9] | 高大伟, 黄铁球, 邢琰. 六轮摇臂-悬架式星球车全动力学建模与分析[J].航天控制, 2021, 39(1): 46-51. |
| Gao Da-wei, Huang Tie-qiu, Xing Yan. Complete dynamics modeling and analysis of 6-wheel rocker-bogie rover[J]. Aerospace Control, 2021, 39(1): 46-51. | |
| [10] | 徐鸿, 雷波, 刘锦阳. 月球车与月壤交互作用的离散元-多体动力学耦合建模[J].振动与冲击, 2024, 43(4): 239-249. |
| Xu Hong, Lei Bo, Li Jin-yang. DEM-MBD coupled modelling and analysis for the mutual interaction of lunar rover and moon soil[J]. Journal of Vibration and Shock, 2024, 43(4): 239-249. | |
| [11] | Zhang K D, Zhang Y Q, Wu J L, et al. Three-dimensional MFBD-DEM coupling simulation of flexible wire mesh wheel-soil over lunar rough terrain[J]. Computational Particle Mechanics, 2024, 12: 1349-1370. |
| [12] | Zhang Y M, Dai J P, Hu W, et al. Using high fidelity discrete element simulation to calibrate an expeditious terramechanics model in a multibody dynamics framework[J/OL]. [2025-03-25]. |
| [13] | Zhu J Z, Zou M, Shen Y, et al. 3D DEM-FEM simulation of the flexible metal wheel-soil interaction in low gravity environments[J]. Journal of Mechanical Engineering Science, 2022, 237(6): 1267-1278. |
| [14] | Chen L N, Zou M, Chen Z, et al. The applications of soil bin test facilities to terramechanics: a review[J]. Rendiconti Lincei. Scienze Fisiche e Naturali, 2024, 35(3): 683-703. |
| [15] | Du J S, Huang T Q. A method for traction ability research of a rover wheel on mixed planet terrain with movable stones[J]. Space: Science & Technology, 2023, 3: No.0018. |
| [16] | Rodríguez-Martínez D, Uno K, Sawa K, et al. Enabling faster locomotion of planetary rovers with a mechanically-hybrid suspension[J]. IEEE Robotics and Automation Letters, 2024, 9(1): 619-626. |
| [17] | 袁野, 杨怀广, 丁亮, 等. 反映载荷影响的星球车车轮试验及模型研究[J]. 机械工程学报, 2024, 60(14): 263-271. |
| Yuan Ye, Yang Huai-guang, Ding Liang,et al. Experimental study and modeling considering the influence of wheel load for planetary exploration rovers[J]. Journal of Mechanical Engineering, 2024, 60(14): 263-271. | |
| [18] | 翟广龙, 黄铁球. 星球车刚性车轮在混合地形上牵引性能研究[J]. 西北工业大学学报, 2020, 38(6): 1240-1248. |
| Zhai Guang-long, Huang Tie-qiu. Exploring tractive performance of planetary rover's rigid wheels on mixed terrain[J]. Journal of Northwestern Polytechnical University, 2020, 38(6): 1240-1248. |
| [1] | En-liang WANG,Zhi-feng REN,Chu WANG,Jun-wei LIU,Xing-chao LIU,Ye TIAN,Meng ZOU,Zi-xiao LU,Wei-wei ZHANG,Sheng-yuan JIANG. Experiment on compressive strength of simulated lunar soil based on grey correlation analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 2015-2025. |
| [2] | Zhen-yu HU,Yan SHEN,Wei-jun WANG,Xiao-tao LUO,Meng ZOU. Analysis of drawbar pull to CE⁃4 Lunar rover based on rutting image of wheel [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2474-2482. |
| [3] | Ye TIAN,Nan-nan LI,Jun-wei LIU,Sheng-yuan JIANG,Chu WANG,Wei-wei ZHANG. Identification of critical fragments cutting load of simulated lunar soil based on support vector machine [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(7): 2143-2151. |
| [4] | Chen HUA,Run-xin NIU,Biao YU. Methods and applications of ground vehicle mobility evaluation [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1229-1244. |
| [5] | Long XUE,Meng YAO,Li-ben LI,Yin-wu LI,Xiang-jin DENG,Jian-qiao LI,Meng ZOU. Experimental analysis of mechanical properties of surface lunar soil based on lunar indentation [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(3): 497-503. |
| [6] | Kang WANG,Meng YAO,Li-ben LI,Jian-qiao LI,Xiang-jin DENG,Meng ZOU,Long XUE. Mechanical performance identification for lunar soil in lunar surface sampling [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1146-1152. |
| [7] | LIU Yu-mei,LIU Li,CAO Xiao-ning,XIONG Ming-ye,ZHUANG Jiao-jiao. Construction on collision avoidance model of bogie dynamic simulation test bench [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1661-1668. |
| [8] | MA Wen-xing,HU Jing,CHU Ya-xu,WANG Song-lin,WU Yue-shi. Dynamic load strength analysis of over-running clutch of dual turbine torque [J]. 吉林大学学报(工学版), 2014, 44(3): 675-679. |
| [9] | JIA Shu-qiang, SHANG Tao, WANG Xin, GONG Wen-bin, LI Qi, JIN Song-zhe. Study of motion mechanism and performance analysis of new swing-type ball mill [J]. 吉林大学学报(工学版), 2012, 42(增刊1): 71-76. |
| [10] | LU Dang, DONG Yi-liang, QIN Min, CHENG Chao. Modeling of dynamic load for leaf spring [J]. 吉林大学学报(工学版), 2011, 41(增刊1): 12-16. |
| [11] | GUO Kong-hui, JIN Ling-ge, LU Dang. Application of UniTire in vehicle dynamics simulation [J]. 吉林大学学报(工学版), 2009, 39(增刊2): 241-0245. |
| [12] | ZHANG Peng,DENG Zong-quan,HU Ming,GAO Hai-bo. Mobility performance analysis of lunar rover with center of mass varied based on the theory of terramechanics [J]. 吉林大学学报(工学版), 2009, 39(06): 1573-1578. |
| [13] |
Jin Li-qiang, Wang Qing-nian, Zhou Xue-hu, Song Chuan-xue .
Control strategy and simulation for electronic differential of vehicle with motorized wheels [J]. 吉林大学学报(工学版), 2008, 38(增刊): 1-0006. |
| [14] | Jin Li-qiang, Wang Qing-nian, Song Chuan-xue . Dynamic simulation model and experimental validation for vehicle with motorized wheels [J]. 吉林大学学报(工学版), 2007, 37(04): 745-750. |
| [15] |
Li Jie,Yan Chu-liang,Yang Fang-fei .
Dynamic simulation and parameter optimization of the combine harvester vibration sieve [J]. 吉林大学学报(工学版), 2006, 36(05): 701-0704. |
|
||