Journal of Jilin University(Engineering and Technology Edition) ›› 2018, Vol. 48 ›› Issue (6): 1661-1668.doi: 10.13229/j.cnki.jdxbgxb20170878
Previous Articles Next Articles
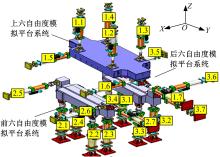
Construction on collision avoidance model of bogie dynamic simulation test bench
LIU Yu-mei1( ),LIU Li1,CAO Xiao-ning2,XIONG Ming-ye3,ZHUANG Jiao-jiao1
),LIU Li1,CAO Xiao-ning2,XIONG Ming-ye3,ZHUANG Jiao-jiao1
- 1. College of Transportation,Jilin University,Changchun 130022,China
2. CRRC Qingdao Sifang Co.Ltd.,Qingdao 266111,China
3. Department of Electronic and Computer Engineering,University of Illinois at Urbana-Champaign,Illinois 61801,USA
CLC Number:
- U461



| [1] | 段清娟 . 基于任务划分的多机器人协调与跟踪控制研究[D]. 西安:西北工业大学机电学院, 2006. |
| Duan Qing-juan . Research on task-partitioned multi-robot coordination and tracking control [D].Xi'an:School of Electromechanics, Northwestern Polytechnical University, 2006. | |
| [2] | 曹晓宁, 刘玉梅, 苏建 , 等. 转向架质心高度的测定[J]. 吉林大学学报:工学版, 2013,43(2):329-334. |
| Cao Xiao-ning, Liu Yu-mei, Su Jian , et al. Determination of mass center height of bogie[J]. Journal of Jilin University (Engineering and Technology Edition), 2013,43(2):329-334. | |
| [3] |
刘玉梅, 曹晓宁, 赵聪聪 , 等. 基于六自由度平台的轨道不平顺几何信息模拟[J]. 西南交通大学学报, 2014,49(6):1002-1009.
doi: 10.3969/j.issn.0258-2724.2014.06.011 |
|
Liu Yu-mei, Cao Xiao-ning, Zhao Cong-cong , et al. Geometry simulation of track torsion-irregularity based on 6-DOF platform[J]. Journal of Southwest Jiaotong University, 2014,49(6):1002-1009.
doi: 10.3969/j.issn.0258-2724.2014.06.011 |
|
| [4] | 曹晓宁 . 高速列车转向架测试台3-六自由度平台运动学及工作空间研究[D]. 长春:吉林大学交通学院, 2013. |
| Cao Xiao-ning . Study on kinematics and workspace of three six-dof platform high-speed train bogie test bench[D]. Changchun:College of Transportation Jilin University,2013. | |
| [5] |
Huang Xi-guang . Forword displacement analysis of a parallel manipulator[J]. Advanced Materials Research, 2011, 217-218:1061-1065.
doi: 10.4028/www.scientific.net/AMR.217-218.1061 |
| [6] |
刘玉梅, 曹晓宁, 苏建 , 等. 转向架测试6自由度模拟平台位姿正解解算[J]. 江苏大学学报:自然科学版, 2012,33(6):621-626.
doi: 10.3969/j.issn.1671-7775.2012.06.001 |
|
Liu Yu-mei, Cao Xiao-ning, Su Jian , et al. Forward kinematics solution of 6 degree of freedom simulation platform for bogie test[J]. Journal of Jiangsu University (Natural Science Edition), 2012,33(6):621-626.
doi: 10.3969/j.issn.1671-7775.2012.06.001 |
|
| [7] | Krishnamurthy P, Khorrami F, Fujikawa S. A modeling framework for six degree-of-freedom control of unmanned sea surface vehicles [C]//Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference,Seville,Spain, 2005: 2676-2681. |
| [8] | Liu Yu-mei, Cao Xiao-ning, Su Jian, et al. The pose real-time solution and control of the 6-DOF loading platform for bogie test [C]//Proceedings 2011 International Conference on Transportation, Mechanical, and Electrical Engineering.USA:IEEE Computer Society, 2011: 2294-2297. |
| [9] |
王培俊, 王文静, 陈鹏 , 等. 基于OBB算法和前向预防的快速碰撞检测[J]. 西南交通大学学报, 2011,46(6):1003-1007.
doi: 10.3969/j.issn.0258-2724.2011.06.019 |
|
Wang Pei-jun, Wang Wen-jing, Chen Peng , et al. Rapid collision detection based on OBB algorithm and penetration avoidance mechanism[J]. Journal of Southwest Jiaotong University, 2011,46(6):1003-1007.
doi: 10.3969/j.issn.0258-2724.2011.06.019 |
|
| [10] |
曲慧雁, 赵伟, 秦爱红 . 基于优化算子的快速碰撞检测法[J]. 吉林大学学报:工学版, 2017,47(5):1598-1603.
doi: 10.13229/j.cnki.jdxbgxb201705036 |
|
Qu Hui-yan, Zhao Wei, Qin Ai-hong . A fast collision detection algorithm based on optimization operator[J]. Journal of Jilin University (Engineering and Technology Edition), 2017,47(5):1598-1603.
doi: 10.13229/j.cnki.jdxbgxb201705036 |
|
| [11] |
陈俊超, 李刚 . 一种抗遮挡的多运动目标跟踪改进算法[J]. 小型微型计算机系统, 2012,33(2):307-310.
doi: 10.3969/j.issn.1000-1220.2012.02.024 |
|
Chen Jun-chao, Li Gang . Improved anti-occlusion tracking algorithm of multiple moving object[J]. Journal of Chinese Computer Systems, 2012,33(2):307-310.
doi: 10.3969/j.issn.1000-1220.2012.02.024 |
| [1] | CHANG Cheng,SONG Chuan-xue,ZHANG Ya-ge,SHAO Yu-long,ZHOU Fang. Minimizing inverter capacity of doubly-fed machine driving electric vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1629-1635. |
| [2] | XI Li-he,ZHANG Xin,SUN Chuan-yang,WANG Ze-xing,JIANG Tao. Adaptive energy management strategy for extended range electric vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1636-1644. |
| [3] | HE Ren,YANG Liu,HU Dong-hai. Design and analysis of refrigeration system supplied by solar auxiliary power of refrigerator car [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1645-1652. |
| [4] | NA Jing-xin,MU Wen-long,FAN Yi-sa,TAN Wei,YANG Jia-zhou. Effect of hygrothermal aging on steel-aluminum adhesive joints for automotive applications [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1653-1660. |
| [5] | SONG Da-feng, WU Xi-tao, ZENG Xiao-hua, YANG Nan-nan, LI Wen-yuan. Life cycle cost analysis of mild hybrid heavy truck based on theoretical fuel consumption model [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1313-1323. |
| [6] | ZHU Jian-feng, ZHANG Jun-yuan, CHEN Xiao-kai, HONG Guang-hui, SONG Zheng-chao, CAO Jie. Design modification for automotive body structure based on seat pull safety performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1324-1330. |
| [7] | JIN Li-sheng, XIE Xian-yi, GAO Lin-lin, GUO Bai-cang. Distributed electric vehicle stability control based on quadratic programming [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1349-1359. |
| [8] | WANG De-jun, WEI Wei-li, BAO Ya-xin. Actuator fault diagnosis of ESC system considering crosswind interference [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1548-1555. |
| [9] | ZHAO Wei-qiang, GAO Ke, WANG Wen-bin. Prevention of instability control of commercial vehicle based on electric-hydraulic coupling steering system [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1305-1312. |
| [10] | NA Jing-xin, PU Lei-xin, FAN Yi-sa, SHEN Chuan-liang. Effect of temperature and humidity on the failure strength of Sikaflex-265 aluminum adhesive joints [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1331-1338. |
| [11] | WANG Yan, GAO Qing, WANG Guo-hua, ZHANG Tian-shi, YUAN Meng. Simulation of mixed inner air-flow integrated thermal management with temperature uniformity of Li-ion battery [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1339-1348. |
| [12] | KUI Hai-lin, BAO Cui-zhu, LI Hong-xue, LI Ming-da. Idling time prediction method based on least square support vector machine [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1360-1365. |
| [13] | HU Man-jiang, LUO Yu-gong, CHEN Long, LI Ke-qiang. Vehicle mass estimation based on longitudinal frequency response characteristics [J]. 吉林大学学报(工学版), 2018, 48(4): 977-983. |
| [14] | ZHANG Man, SHI Shu-ming. Analysis of state transition characteristics for typical vehicle driving cycles [J]. 吉林大学学报(工学版), 2018, 48(4): 1008-1015. |
| [15] | LIU Guo-zheng, SHI Wen-ku, Chen Zhi-yong. Finite element analysis of transmission error for hypoid gears considering installation error [J]. 吉林大学学报(工学版), 2018, 48(4): 984-989. |
|