吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (5): 1879-1886.doi: 10.13229/j.cnki.Jdxbgxb20200417
• 通信与控制工程 • 上一篇
面向狭小平行泊车位的路径规划与跟踪控制
张家旭1,2( ),王晨1,赵健1(),卜纯研1
),王晨1,赵健1(),卜纯研1
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.中国第一汽车集团有限公司 智能网联研发院,长春 130011
Path planning and tracking control for narrow parallel parking space
Jia-xu ZHANG1,2(),Chen WANG1,Jian ZHAO1(),Chun-yan BU1
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.Intelligent Network R&D Institute,China FAW Group Co. ,Ltd. ,Changchun 130011,China
摘要:
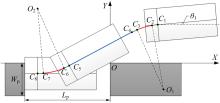
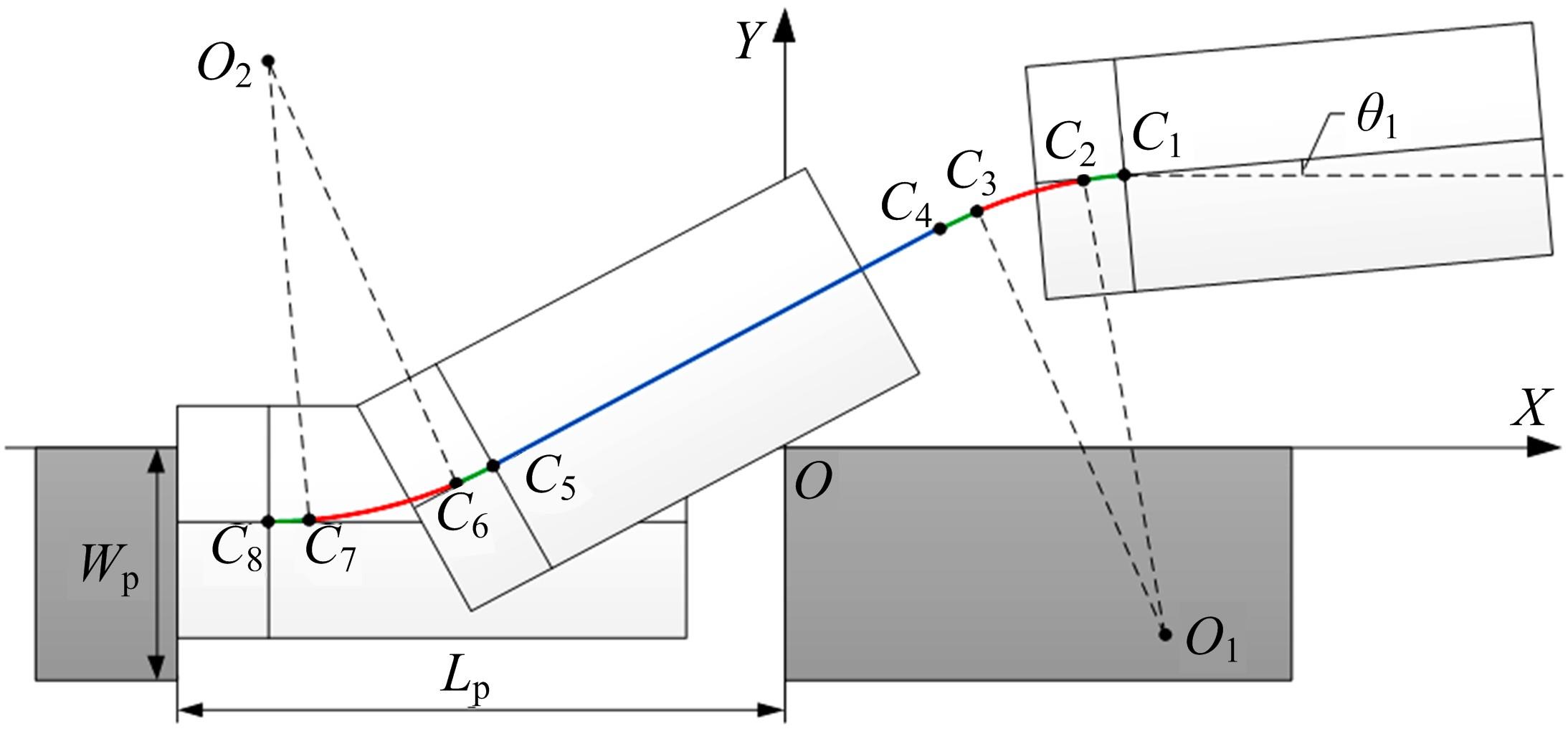
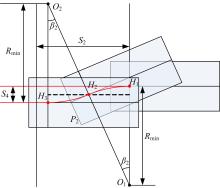
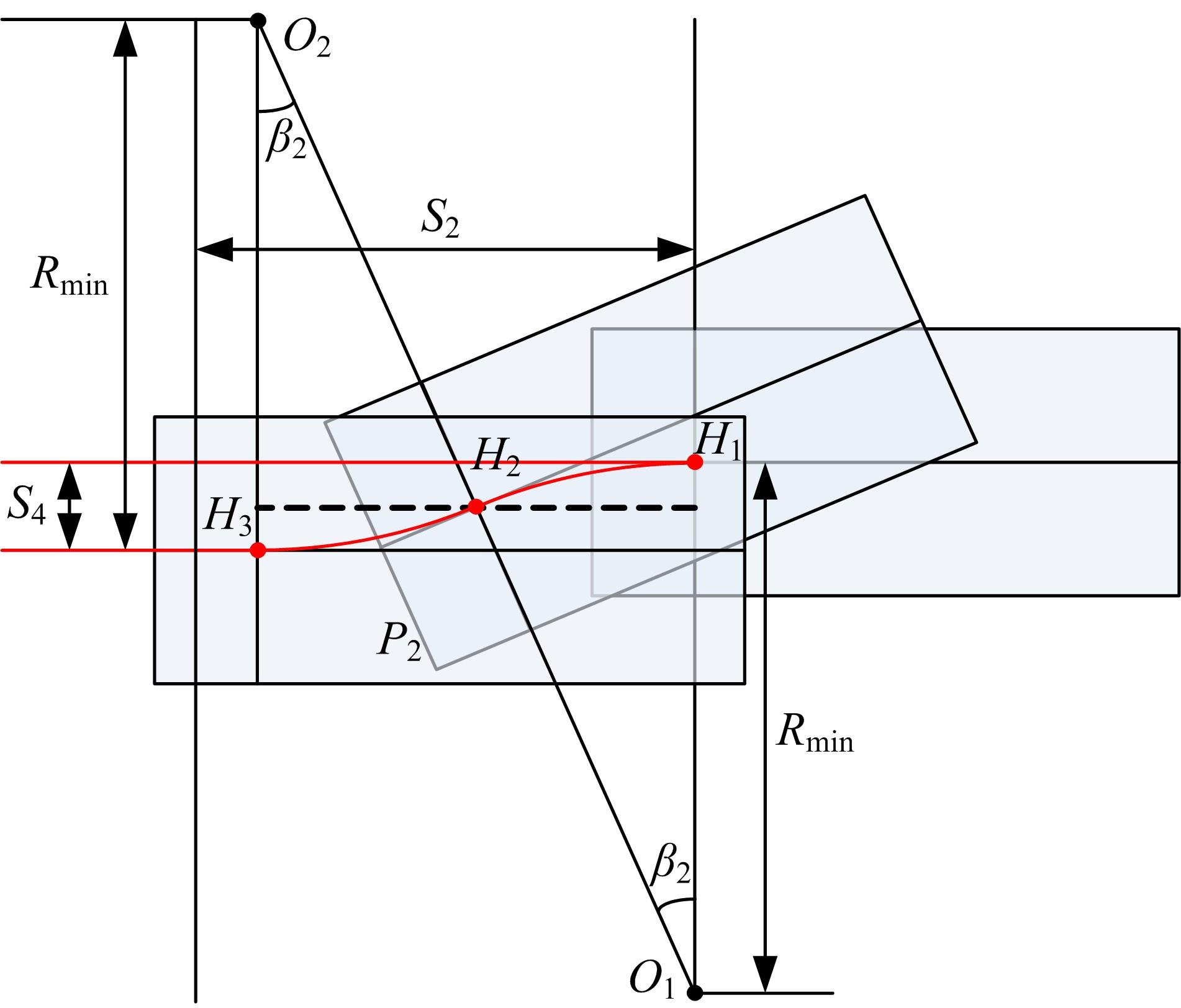
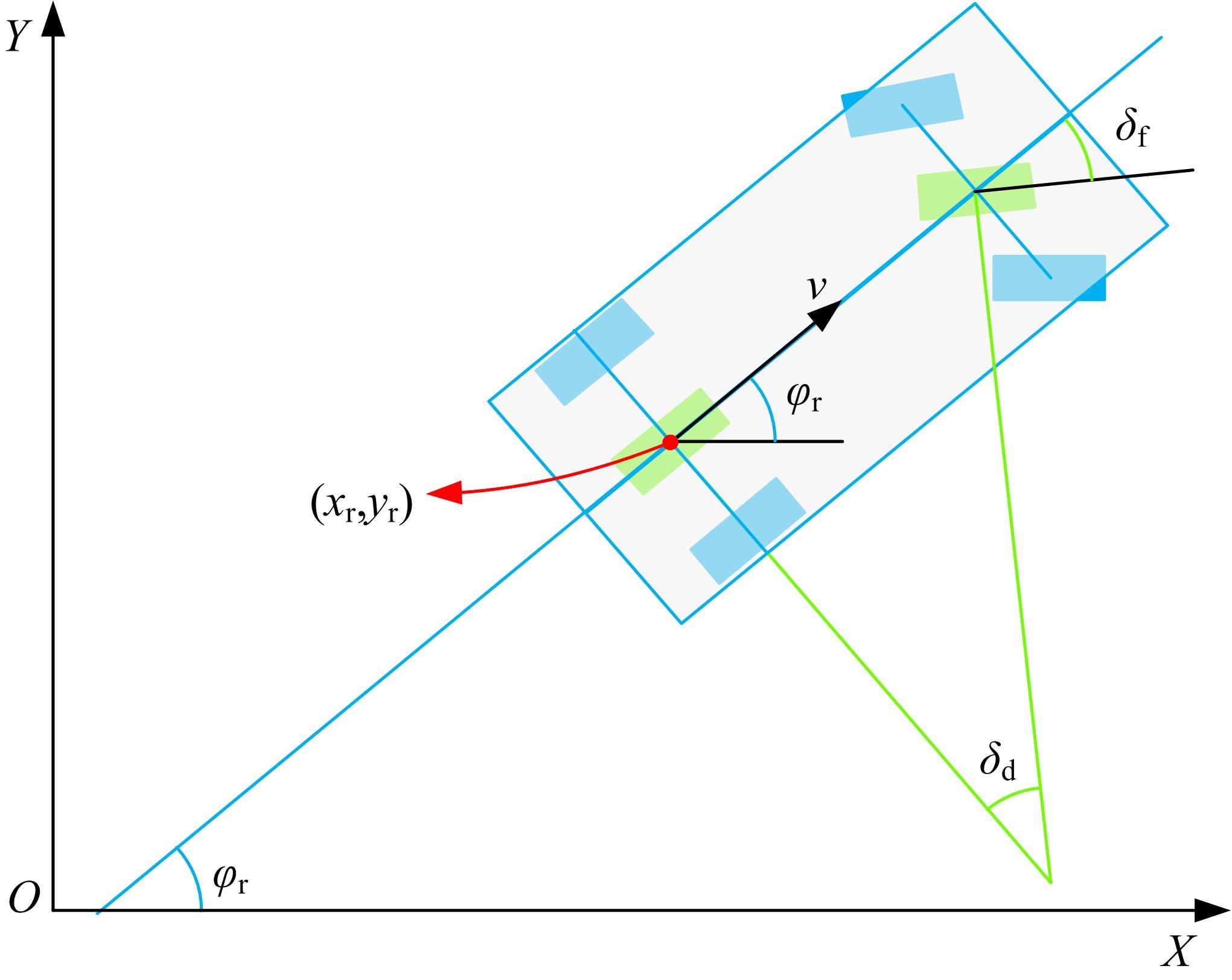
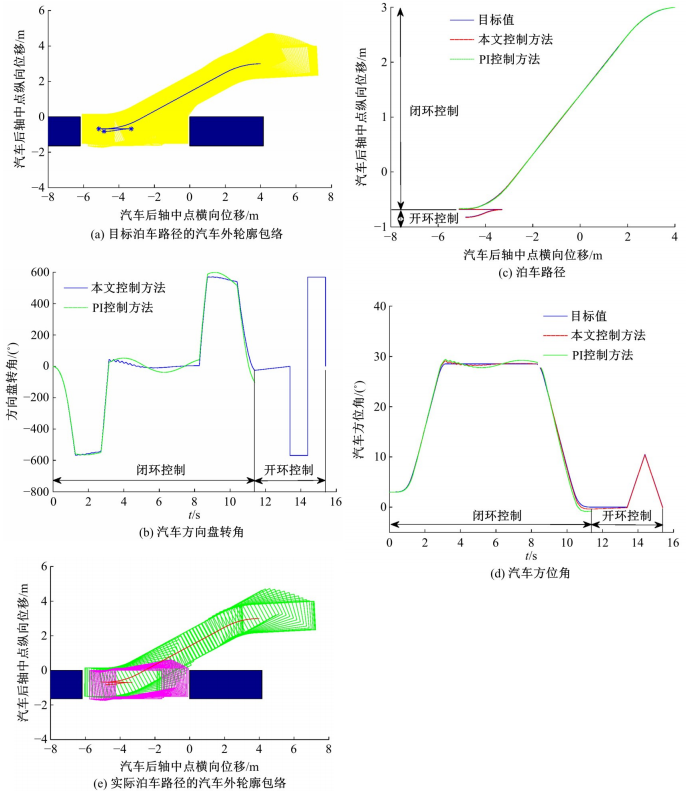
针对狭小平行泊车位的路径规划和跟踪控制问题,本文融合数值优化方法和圆弧-直线-回旋曲线组合方法,提出了一种计算效率高、适用范围广的平行泊车路径规划方法,以及一种基于非时间参考量泊车路径跟踪误差模型的平行泊车路径跟踪滑模控制策略。首先,将平行泊车路径细分为用于引导汽车最大限度靠近泊车位的进入段路径和用于引导汽车调整其目标位姿的调整段路径,通过求解基于圆弧-直线-回旋曲线组合方法建立的约束最优化问题得到进入段路径,并通过圆弧-直线组合方式规划出调整段路径;随后,建立非时间参考量泊车路径跟踪误差模型,将三维泊车路径跟踪控制问题简化为二维泊车路径跟踪控制问题,并设计具有标定参数、鲁棒性强特点的泊车路径跟踪滑模控制策略;最后,仿真验证了本文方法的有效性和可行性,结果表明:针对狭小平行泊车位和泊车初始方位角不为零的情况,本文方法可以快速、稳定和精确地引导汽车完成泊车操作。
中图分类号:
- U461.1

| 1 | 钱立军, 胡伟龙, 刘庆, 等. 多段自动泊车路径规划及其关键技术[J]. 吉林大学学报: 工学版, 2016, 46(3): 785-791. |
| Qian Li-jun, Hu Wei-long, Liu Qing, et al. Multiple segment method for automatic parking path planning and its key technology[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(3): 785-791. | |
| 2 | 张家旭, 赵健, 施正堂, 等. 基于回旋曲线的平行泊车路径规划与跟踪控制[J]. 吉林大学学报: 工学版, 2020, 50(6): 2247-2257. |
| Zhang Jia-xu, Zhao Jian, Shi Zheng-tang, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(6): 2247-2257. | |
| 3 | Upadhyay S, Ratnoo A. A point-to-ray framework for generating smooth parallel parking maneuvers[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 1268-1275. |
| 4 | Qin Y W, Liu F Q, Wang P. A feasible parking algorithm in form of path planning and following[C]∥Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, New York, USA, 2019: 6-11. |
| 5 | Zheng K Y, Liu S. RRT based path planning for autonomous parking of vehicle[C]∥2018 IEEE 7th Data Driven Control and Learning Systems Conference, Hubei, China, 2018: 627-632. |
| 6 | 张家旭, 赵健, 施正堂, 等. 采用hp自适应伪谱法的全自动泊车系统轨迹规划与跟踪控制[J]. 西安交通大学学报, 2020, 54(6): 176-184. |
| Zhang Jia-xu, Zhao Jian, Shi Zheng-tang, et al. A trajectory planning and tracking control method for fully-automatic parking system using hp-adaptive pseudo spectral method[J]. Journal of Xi'an Jiaotong University, 2020, 54(6): 176-184. | |
| 7 | Chai R Q, Tsourdos A, Savvaris A, et al. Two-stage trajectory optimization for autonomous ground vehicles parking maneuver[J]. IEEE Transactions on Industrial Informatics, 2019, 15(7): 3899-3909. |
| 8 | Chai R Q, Tsourdos A, Savvaris A, et al. Multi-objective optimal parking maneuver planning of autonomous wheeled vehicles[J]. IEEE Transactions on Industrial Electronics, 2020, 99: 10.1109/TIE.2019.2962482. |
| 9 | Li H, Luo J, Yan S, et al. Research on parking control of bus based on improved pure pursuit algorithms[C]∥18th International Symposium on Distributed Computing and Applications for Business Engineering and Science, Hubei, China, 2019: 21-26. |
| 10 | Khalili E, Ghaisari J, Danesh M, et al. Implementation of parallel parking system on a car like mobile robot[C]∥25th Iranian Conference on Electrical Engineering, Tehran, Iran, 2017: 562-566. |
| 11 | Ye H, Jiang H B, Ma S D, et al. Linear model predictive control of automatic parking path tracking with soft constraints[J]. International Journal of Advanced Robotic Systems, 2019, 16(3): 1-13. |
| 12 | Das S, Yarlagadda Y, Vora P B, et al. Trajectory planning and fuzzy control for perpendicular parking[C]∥IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Daegu, Korea, 2017: 518-523. |
| 13 | , Intelligent transport systems-assisted parking system (APS)—performance requirements and test procedures[S]. |
| 14 | Kim S J, Koh K, Lustig M, et al. An interior-point method for large-scale L1-regularized least squares[J]. IEEE Journal of Selected Topics in Signal Processing, 2007, 1(4): 606-617. |
| 15 | 张家旭. 汽车底盘集成非线性鲁棒控制方法研究[D]. 长春: 吉林大学汽车工程学院, 2018. |
| Zhang Jia-xu. Research on nonlinear robust control method for integrated vehicle chassis control system[D]. Changchun: College of Automotive Engineering, Jilin University, 2018. |
| [1] | 张家旭,王欣志,赵健,施正堂. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1081-1090. |
| [2] | 韩小健,赵伟强,陈立军,郑宏宇,刘阳,宗长富. 基于区域采样随机树的客车局部路径规划算法[J]. 吉林大学学报(工学版), 2019, 49(5): 1428-1440. |
| [3] | 钱立军, 胡伟龙, 刘庆, 吴冰. 多段式自动泊车路径规划及其关键技术[J]. 吉林大学学报(工学版), 2016, 46(3): 785-791. |
| [4] | 周炳海, 周琪. 防潜在死锁的整体式自动物料搬运系统调度方法[J]. 吉林大学学报(工学版), 2016, 46(2): 595-601. |
| [5] | 康冰, 王曦辉, 刘富. 基于改进蚁群算法的搜索机器人路径规划[J]. 吉林大学学报(工学版), 2014, 44(4): 1062-1068. |
| [6] | 刘厚德,梁斌,徐文福,穆清涛,余江华. 自旋目标运动预测及自主捕获路径规划方法[J]. 吉林大学学报(工学版), 2014, 44(3): 757-764. |
| [7] | 贾鹤鸣, 宋文龙, 陈子印. 基于反馈增益反步法的非完整约束移动机器人路径跟踪控制[J]. , 2012, 42(04): 1003-1007. |
| [8] | 刘罡,刘玉斌,赵杰,朱磊. 基于可视切线图的新型煤矿救援机器人路径规划[J]. 吉林大学学报(工学版), 2011, 41(4): 1107-1112. |
| [9] | 姜辉, 郭孔辉, 张建伟. 基于路径规划的自动平行泊车转向控制器[J]. 吉林大学学报(工学版), 2011, 41(02): 293-0297. |
| [10] | 赵扬, 赵继, 张雷, 齐立哲. 基于逆向工程的机器人磨削叶片[J]. 吉林大学学报(工学版), 2009, 39(05): 1176-1180. |
| [11] | 殷礼明,贾阳 . 月面巡视探测器路径规划性能评估算法[J]. 吉林大学学报(工学版), 2008, 38(04): 996-1000. |
|
||