吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (4): 1419-1425.doi: 10.13229/j.cnki.jdxbgxb.20240317
基于跟踪-学习-检测算法的四旋翼无人机自主降落姿态控制方法
张彬桥1,2( ),吴健1,2
),吴健1,2
- 1.三峡大学 梯级水电站运行与控制湖北省重点实验室,湖北 宜昌 443002
2.三峡大学 电气与新能源学院,湖北 宜昌 443002
Attitude control method for autonomous landing of quadcopter drone based on tracking-learning-detection algorithm
Bin-qiao ZHANG1,2(),Jian WU1,2
- 1.Hubei Provincial Key Laboratory for Operation and Control of Cascaded Hydropower Station,China Three Gorges University,Yichang 443002,China
2.College of Electrical Engineering & New Energy,China Three Gorges University,Yichang 443002,China
摘要:
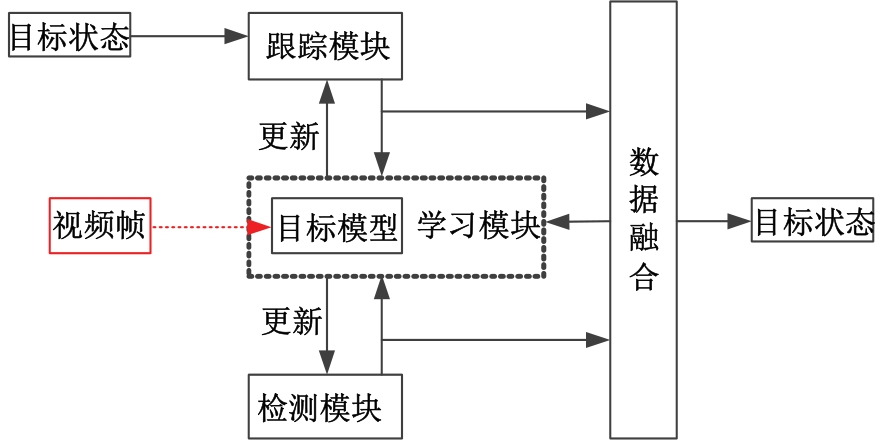
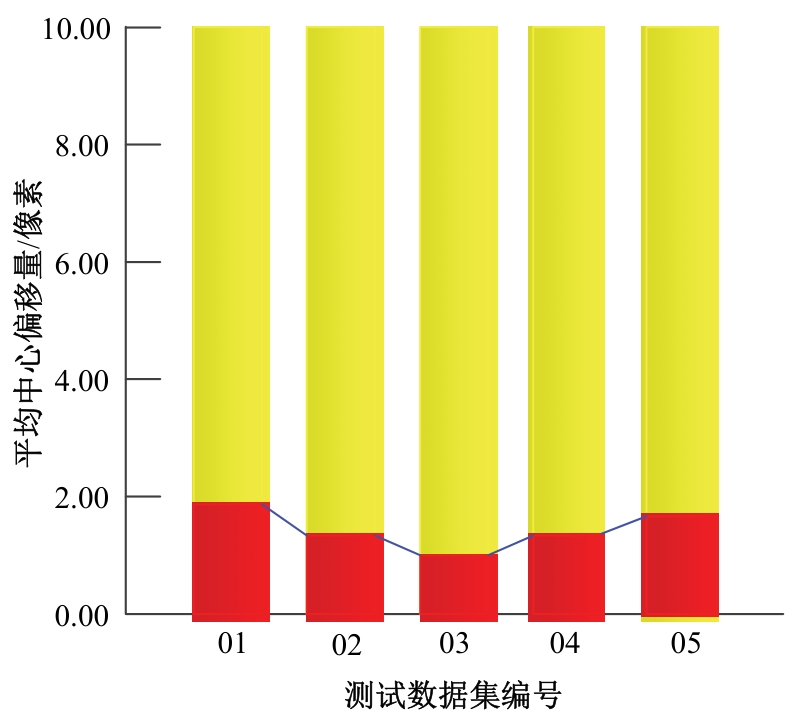
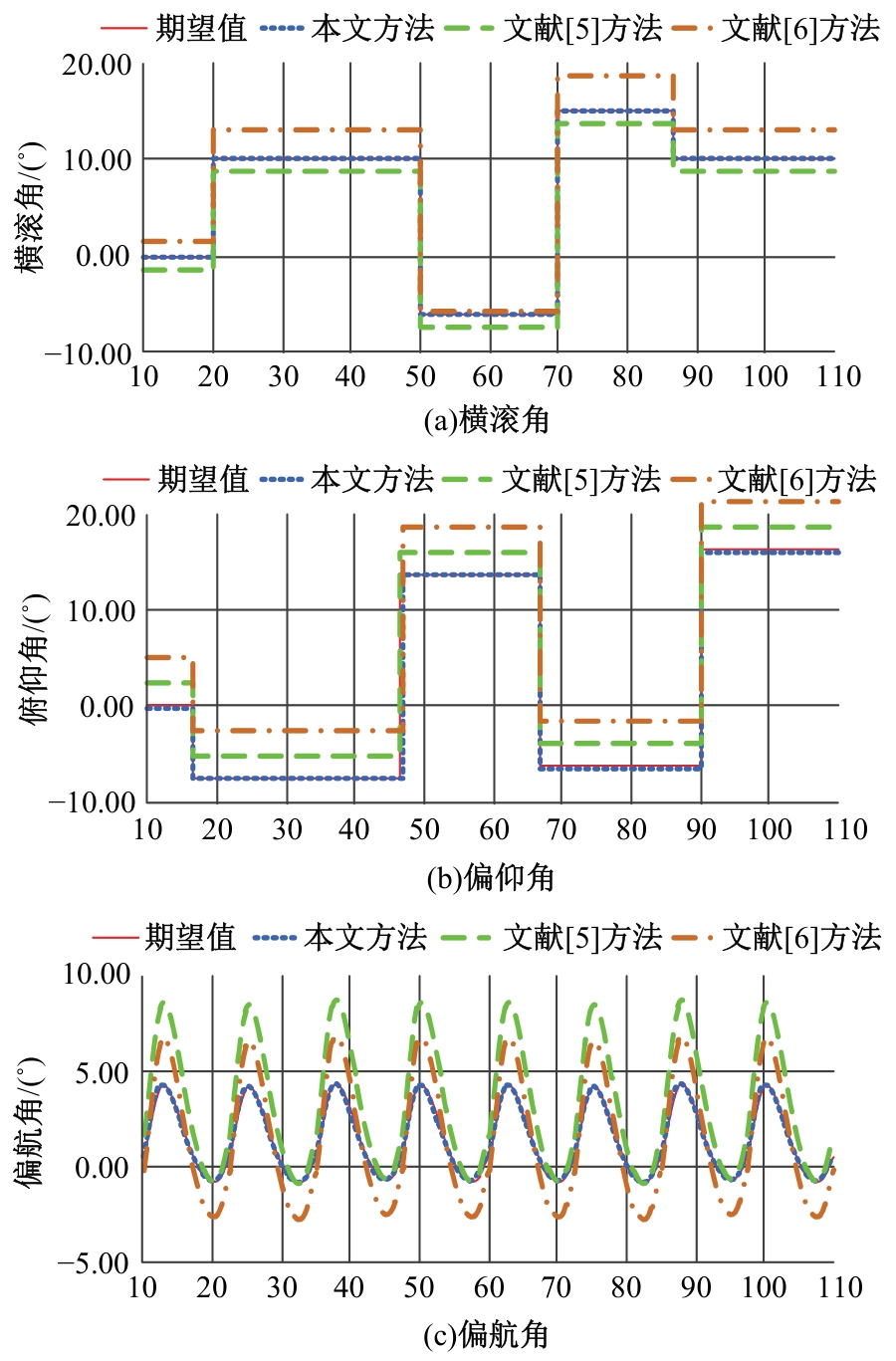
在复杂野外环境下,无人机降落过程中目标可能因暂时被遮挡或离开视野而导致跟踪失效。为增强无人机姿态控制精度和稳定性,本文提出了基于跟踪-学习-检测(Tracking-learning-detection,TLD)算法的四旋翼无人机自主降落姿态控制方法。通过结合扩展卡尔曼滤波和TLD算法检测特定目标,并利用多个中值流实现目标跟踪。通过精确捕捉目标位置信息,结合附加惯性项的人群搜索算法和自抗扰控制技术,优化搜索步长以及方向惯性系数的选取方式,从而改善四旋翼无人机的飞行姿态,提升降落过程的稳定性与安全性。实验结果表明,本文方法的平均中心偏移量在1.98像素以内,横滚角、俯仰角以及偏航角偏差均<0.02°,符合期望,运行平稳,性能更优,可以确保四旋翼无人机安全降落。
中图分类号:
- TP391


| 1 | 李鸿一, 王琰, 姚得银, 等. 基于事件触发机制的多四旋翼无人机鲁棒自适应滑模姿态控制[J]. 中国科学:信息科学, 2023, 53(1): 66-80. |
| Li Hong-yi, Wang Yan, Yao De-yin, et al. Robust adaptive sliding mode attitude control of MQUAVs based on event-triggered mechanism[J]. Scientia Sinica(Informationis), 2023,53(1): 66-80. | |
| 2 | 高强, 刘新鹏, 刘春平, 等. 四旋翼无人机串级自抗扰姿态控制及轨迹跟踪[J]. 电光与控制, 2023, 30(3): 90-95. |
| Gao qiang, Liu Xin-peng, Liu Chun-ping, et al. Cascaded active disturbance rejection attitude control and trajectory tracking of quadrotor UAV[J]. Electronics Optics & Control, 2023,30(3): 90-95. | |
| 3 | 谭丹丹.重载荷多旋翼植保无人机自抗扰鲁棒控制算法[J]. 江苏农业科学, 2022, 50(1): 163-169. |
| Tan Dan-dan. Active disturbance rejection robust control algorithm for heavy-load multi-rotor plant protection UAV[J]. Jiangsu Agricultural Sciences, 2022, 50(1): 163-169. | |
| 4 | 杨文奇, 卢建华, 姜旭, 等.基于改进ESO的四旋翼姿态自抗扰控制器设计[J]. 系统工程与电子技术, 2022, 44(12): 3792-3799. |
| Yang Wen-qi, Lu Jian-hua, Jiang Xu, et al. Design of quadrotor attitude active disturbance rejection controller based on improved ESO[J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. | |
| 5 | 王博, 张贺, 高正红. 大展弦比太阳能无人机横航向姿态控制研究[J]. 西北工业大学学报, 2022, 40(6): 1223-1232. |
| Wang Bo, Zhang He, Gao Zheng-hong. Lateral attitude control of solar-powered UAV with high aspect ratio[J]. Journal of Northwestern Polytechnical University, 2022, 40(6): 1223-1232. | |
| 6 | 刘子龙, 窦鹏程. 四旋翼无人机的位置和姿态控制算法研究[J]. 小型微型计算机系统, 2022, 43(4): 754-758. |
| Liu Zi-long, Dou Peng-cheng. Position and attitude control algorithm study of quadrotor UAV[J]. Journal of Chinese Computer Systems, 2022, 43(4): 754-758. | |
| 7 | Qi J, Gao H, Yu H, et al. Integrated attitude and landing control for quadruped robots in asteroid landing mission scenarios using reinforcement learning[J].Acta Astronautica, 2023, 204: 599-610. |
| 8 | Sadigh S M, Kashaninia A, Dehghan S M. Adaptive fault tolerant attitude control of a nano-satellite with three magnetorquers and one reaction wheel[J].Journal of Aerospace Engineering, 2022, 35(1): No.0001321. |
| 9 | 徐攀, 齐文宗. 一种改进的TLD跟踪算法研究[J]. 计算机仿真, 2022, 39(4): 312-315. |
| Xu Pan, Qi Wen-zong. Research on an improved TLD tracking algorithm[J]. Computer Simulation, 2022, 39(4): 312-315. | |
| 10 | 李祖检, 占荣辉, 庄钊文. 基于形态匹配聚类的近邻扩展目标跟踪算法[J]. 信号处理, 2023, 39(2): 298-309. |
| Li Zu-jian, Zhan Rong-hui, Zhuang Zhao-wen. Extended target tracking algorithm based on morphological matching clustering in near spaced environment[J]. Journal of Signal Processing, 2023,39(2): 298-309. | |
| 11 | 赵祥丹, 王彪, 王志胜, 等. 预测-五阶容积卡尔曼滤波方法[J]. 航空学报, 2023, 44(6): 249-261. |
| Zhao Xiang-dan, Wang Biao, Wang Zhi-sheng, et al.Predictive fifth-degree cubature Kalman filter method[J] Acta Aeronautica et Astronautica Sinica, 2023, 44 (6): 249-261. | |
| 12 | 王娜, 罗亮, 彭锟, 等. 基于组稀疏卡尔曼滤波的多步轨迹预测方法[J]. 空军工程大学学报, 2023, 24(6): 70-77. |
| Wang Na, Luo Liang, Peng Kun, et al. A multi-step trajectory prediction method based on group sparse Kalman filtering[J]. Journal of Air Force Engineering University, 2023,24(6): 70-77. | |
| 13 | 胡芸, 侯明勋. 人群搜索算法拟合Kriging参数的空间数据插值[J]. 湖北大学学报:自然科学版, 2023, 45(6): 865-871. |
| Hu Yun, Hou Ming-xun. Spatial data interpolation of seeker optimization algorithm fitting Kriging model parameters[J]. Journal of Hubei University(Natural Science Edition), 2023,45(6): 865-871. | |
| 14 | 焦嵩鸣, 丁辉, 钟宇飞, 等. 一种基于SiamRPN的无人机目标跟踪及控制算法[J]. 系统仿真学报, 2023, 35(6): 1372-1380. |
| Jiao Song-ming, Ding Hui, Zhong Yu-fei, et al. A UAV target tracking and control algorithm based on SiamRPN[J]. Journal of System Simulation, 2023,35(6): 1372-1380. | |
| 15 | 张堃, 李珂, 邹杰, 等.基于深度迁移强化学习的无人机投放自主引导机动控制算法[J]. 航空科学技术, 2023, 34(11): 103-110. |
| Zhang Kun, Li Ke, Zou Jie, et al. Autonomous Guidance maneuvering control algorithm for UAV dropping based on deep transfer reinforcement learning[J]. Aeronautical Science & Technology, 2023,34(11): 103-110. |
| [1] | 申富媛,李炜,蒋栋年. 四旋翼无人机寿命预测和自主维护方法[J]. 吉林大学学报(工学版), 2023, 53(3): 841-852. |
| [2] | 陈珑茏,冯天宇,吕宗阳,吴玉虎. 共轴倾转旋翼无人机有限时间滑模姿态控制[J]. 吉林大学学报(工学版), 2023, 53(3): 883-890. |
| [3] | 李昂,杨泓渊,雷小萌,宋凯文,千承辉. 基于等效连杆模型的六足机器人行进姿态闭环控制[J]. 吉林大学学报(工学版), 2022, 52(7): 1696-1708. |
| [4] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [5] | 陈闽,张世杰,张迎春. 基于反作用飞轮和磁力矩器的小卫星姿态联合控制算法[J]. 吉林大学学报(工学版), 2010, 40(04): 1155-1160. |
| [6] | 张刘,金光. 输入受限空间飞行器大角度机动控制器设计[J]. 吉林大学学报(工学版), 2010, 40(04): 1166-1170. |
| [7] | 尹永鑫,杨明,王子才 . 复合控制拦截弹的神经网络姿态控制[J]. 吉林大学学报(工学版), 2008, 38(04): 981-985. |
| [8] | 吴云华,曹喜滨,曾占魁,郑鹏飞 . 编队飞行卫星相对姿态变结构分布式协同控制[J]. 吉林大学学报(工学版), 2007, 37(06): 1465-1470. |
| [9] | 张明国,耿云海,贾琳恒 . 基于RBF网络上界自适应学习的预警卫星滑模控制[J]. 吉林大学学报(工学版), 2007, 37(04): 959-964. |
| [10] | 李静,吴云平,杨宗昂,郭立书,王军,李幼德,李春峰 . 车辆姿态控制系统悬架阻尼控制策略[J]. 吉林大学学报(工学版), 2006, 36(增刊2): 24-28. |
| [11] | 刘治华,,贾宏光,白越,,吴一辉,詹迪铌,杨作起,. 集成化储能与姿态控制系统中飞轮高精度测速方法[J]. 吉林大学学报(工学版), 2006, 36(增刊1): 99-0104. |
|