吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 883-890.doi: 10.13229/j.cnki.jdxbgxb20221313
• 通信与控制工程 • 上一篇
共轴倾转旋翼无人机有限时间滑模姿态控制
陈珑茏1,2( ),冯天宇1,2,吕宗阳1,3(),吴玉虎1,2
),冯天宇1,2,吕宗阳1,3(),吴玉虎1,2
- 1.大连理工大学 工业装备智能控制与优化教育部重点实验室,辽宁 大连 116024
2.大连理工大学 控制科学与工程学院,辽宁 大连 116024
3.大连理工大学 通信与信息工程学院,辽宁 大连 116024
Finite⁃time sliding mode attitude control for coaxial tilt⁃rotor unmanned aerial vehicle
Long-long CHEN1,2(),Tian-yu FENG1,2,Zong-yang LYU1,3(),Yu-hu WU1,2
- 1.Key Laboratory of Intelligent Control and Optimization for Industrial Equipment,Ministry of Education,Dalian University of Technology,Dalian 116024,China
2.School of Control Science and Engineering,Dalian University of Technology,Dalian 116024,China
3.School of Communications and Information Engineering,Dalian University of Technology,Dalian 116024,China
摘要:
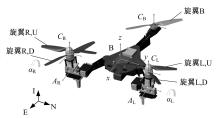
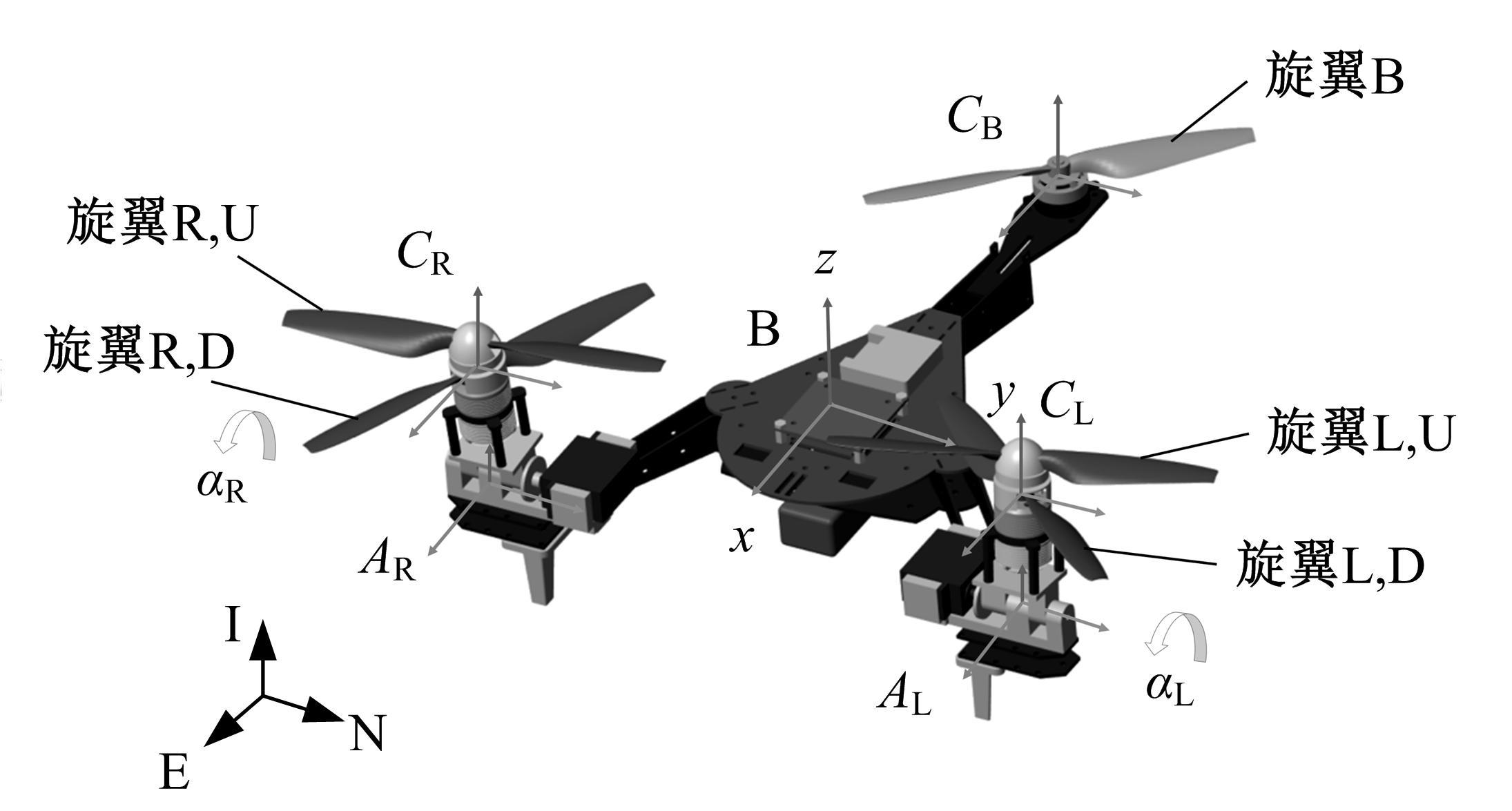
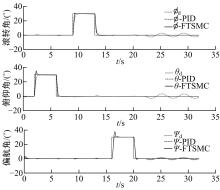
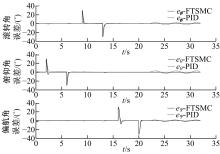
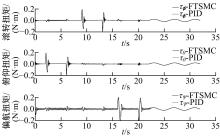
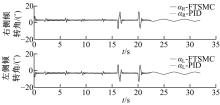
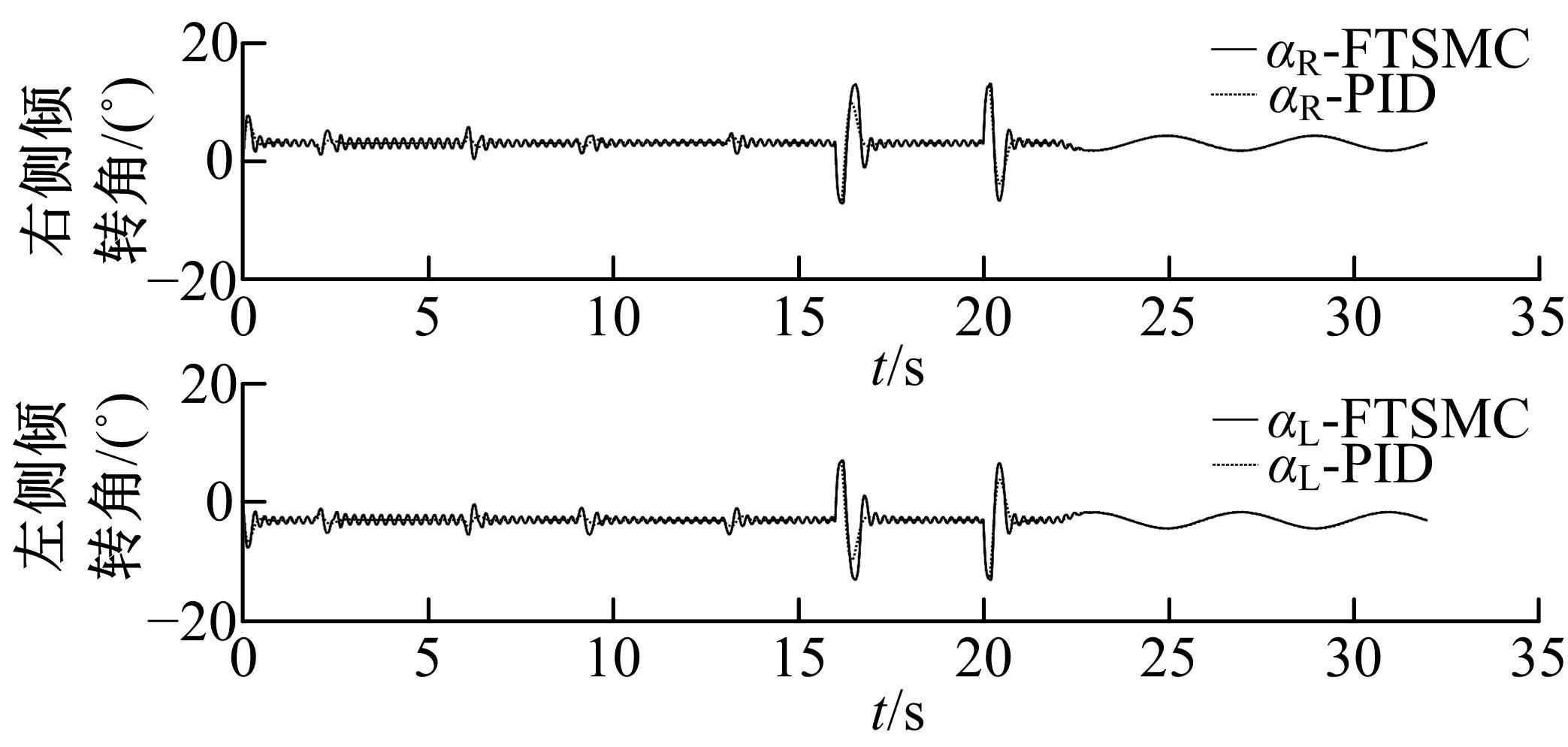
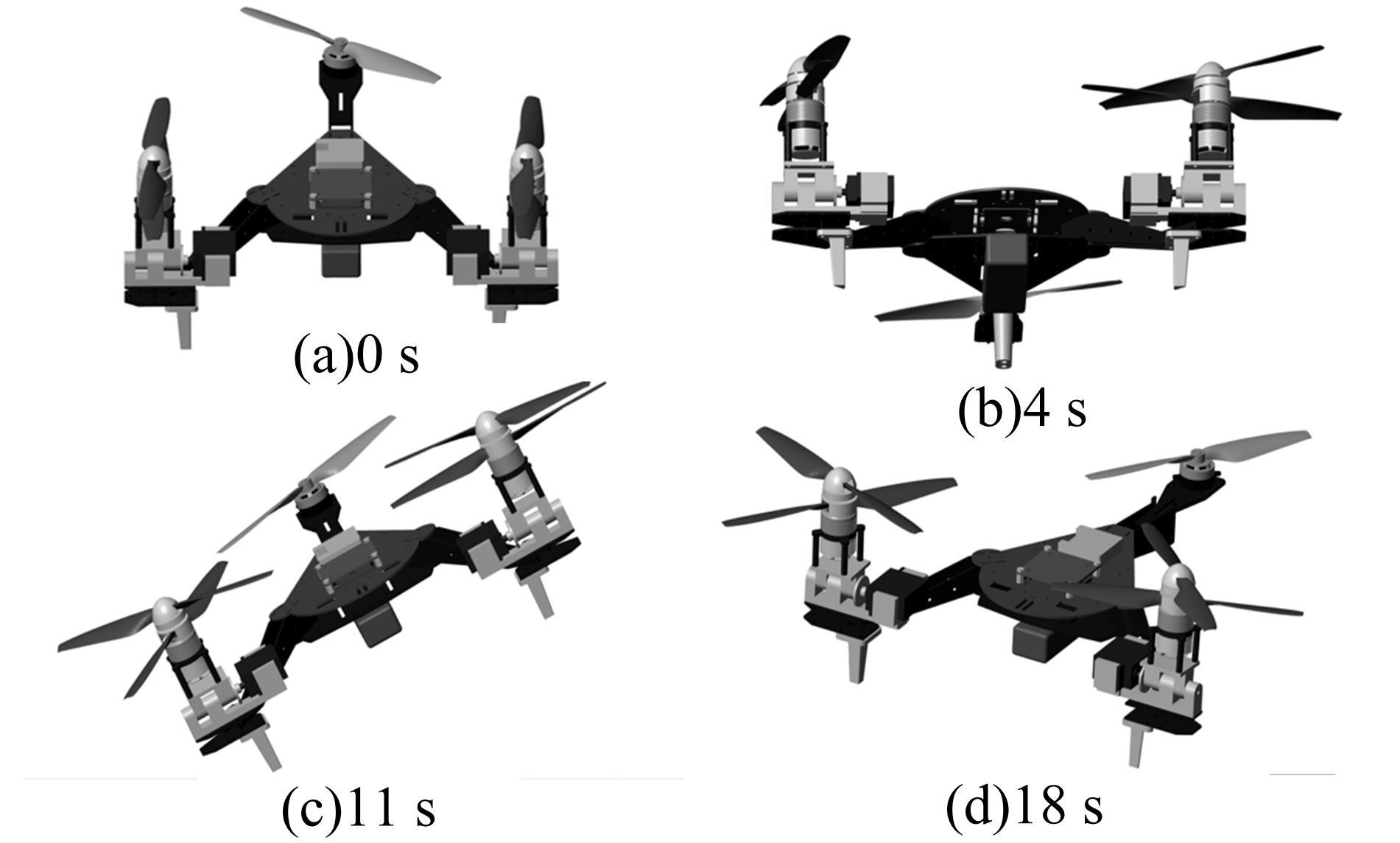
针对受外界干扰的共轴倾转旋翼无人机姿态控制问题,设计了一种有限时间滑模控制器(FTSMC),以提高姿态控制的跟踪能力和在不确定干扰下的鲁棒性。采用牛顿-欧拉法建立了无人机姿态动力学模型,调整动力分配以克服无人机控制通道的过驱动。应用李雅普诺夫理论验证了有限时间滑模控制器的稳定性。最后,在Matlab/SimMechanics平台中进行仿真测试,以验证本文所设计控制器的性能。
中图分类号:
- V279
| 1 | Ryan A, Hedrick J K. A mode-switching path planner for UAV-assisted search and rescue[C]∥Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 2005: 1471-1476. |
| 2 | Rego B S, Raffo G V. Suspended load path tracking control based on zonotopic state estimation using a tilt-rotor UAV[C]∥2016 IEEE 19th International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 2016: 1445-1451. |
| 3 | 陈强, 许洪国, 谭立东. 基于小型无人机摄影测量的交通事故现场勘查[J]. 吉林大学学报:工学版, 2016, 46(5): 1439-1446. |
| Chen Qiang, Xu Hong-guo, Tan Li-dong. Surveying method of traffic accident scene based on SUAV photogrammetry[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1439-1446. | |
| 4 | Papachristos C, Tzes A. Modeling and control simulation of an unmanned tilt tri-rotor aerial vehicle[C]∥2012 IEEE International Conference on Industrial Technology, Athens, Greece, 2012: 840-845. |
| 5 | Liu Z, He Y, Yang L, et al. Control techniques of tilt rotor unmanned aerial vehicle systems: a review[J]. Chinese Journal of Aeronautics, 2017, 30(1): 135-148. |
| 6 | Parham T. V-22 pilot-in-the-loop aeroelastic stability analysis[C]∥47th Annual Forum, Phoenix, AZ, 1991: 1307-1319. |
| 7 | Song Yan-guo, Wang Huan-jin. Design of flight control system for a small unmanned tilt rotor aircraft[J]. Chinese Journal of Aeronautics, 2009, 22(3): 250-256. |
| 8 | Ta D A, Fantoni I, Lozano R. Modeling and control of a tilt tri-rotor airplane[C]∥2012 American control conference (ACC), Montreal, QC, Canada, 2012: 131-136. |
| 9 | Xian B, Hao W. Nonlinear robust fault-tolerant control of the tilt trirotor UAV under rear servo's stuck fault: theory and experiments[J]. IEEE Transactions on Industrial Informatics, 2018, 15(4): 2158-2166. |
| 10 | Wang Zhi-gang, Zhao Hong, Duan Deng-yan, et al. Application of improved active disturbance rejection control algorithm in tilt quad rotor[J]. Chinese Journal of Aeronautics, 2020, 33(6): 1625-1641. |
| 11 | Kastelan D, Konz M, Rudolph J. Fully actuated tricopter with pilot-supporting control[J]. IFAC-PapersOnLine, 2015, 48(9): 79-84. |
| 12 | Gertler J. V-22 osprey tilt-rotor aircraft: background and issues for congress[C]∥Library of Congress Washington DC Congressional Research Service, Washington, USA, 2009: 1-57. |
| 13 | Fonte F, Favale M, Quaranta G, et al. Enhanced gust load recovery for the AW609 tiltrotor[C]∥45th European Rotorcraft Forum, Warsaw, Poland, 2019: 1-13. |
| 14 | 佚名. 中国航天空气动力技术研究院多款彩虹无人机亮相航展[J]. 军民两用技术与产品, 2021(10): 14-15. |
| Anonymous. Multiple CH UAVs of China aerospace aerodynamics research institute appeared in the air show[J]. Dual Use Technologies & Products, 2021(10): 14-15. | |
| 15 | Franchi A, Carli R, Bicego D, et al. Full-pose tracking control for aerial robotic systems with laterally bounded input force[J]. IEEE Transactions on Robotics, 2018, 34(2): 534-541. |
| 16 | Li F, Xu W, Shi Y, et al. Multi-body dynamic modeling, simulation and control strategy design of a Y6 tilt rotor UAV[C]∥2017 2nd International Conference on Advanced Robotics and Mechatronics, Hefei and Tai'an, China, 2017: 373-379. |
| 17 | Cardoso D N, Raffo G V, Esteban S. A robust adaptive mixing control for improved forward flight of a tilt-rotor UAV[C]∥2016 IEEE 19th International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 2016: 1432-1437. |
| 18 | Cetinsoy E, Dikyar S, Hançer C, et al. Design and construction of a novel quad tilt-wing UAV[J]. Mechatronics, 2012, 22(6): 723-745. |
| 19 | Invernizzi D, Giurato M, Gattazzo P, et al. Comparison of control methods for trajectory tracking in fully actuated unmanned aerial vehicles[J]. IEEE Transactions on Control Systems Technology, 2020, 29(3): 1147-1160. |
| 20 | Ta D A, Fantoni I, Lozano R. Modeling and control of a tilt tri-rotor airplane[C]∥Proceedings of the American Control Conference, Montreal, QC, Canada, 2012: 131-136. |
| 21 | Cardoso D N, Esteban S, Raffo G V. A nonlinear W ∞ controller of a tilt-rotor UAV for trajectory tracking[C]∥18th European Control Conference, Naples, Italy, 2019: 928-934. |
| 22 | Chen L, Lv Z, Shen X, et al. Adaptive attitude control for a coaxial tilt-rotor UAV via immersion and invariance methodology[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(9): 1710-1713. |
| 23 | Amato F, Ariola M, Carbone M, et al. Finite-time Control of Linear Systems: A Survey[M]. Birkhäuser Boston: Springer Verlag, 2006: 195-213. |
| 24 | Hong Y, Huang J, Xu Y. On an output feedback finite-time stabilization problem[J]. IEEE Transactions on Automatic Control, 2001, 46(2): 305-309. |
| 25 | Yu S, Yu X, Shirinzadeh B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964. |
| 26 | Pan H, Sun W. Nonlinear output feedback finite-time control for vehicle active suspension systems[J]. IEEE Transactions on Industrial Informatics, 2018, 15(4): 2073-2082. |
| 27 | Wang N, Karimi H R, Li H, et al. Accurate trajectory tracking of disturbed surface vehicles: a finite-time control approach[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(3): 1064-1074. |
| 28 | Lv Z Y, Wu Y, Zhao Q, et al. Design and control of a novel coaxial tilt-rotor UAV[J]. IEEE Transactions on Industrial Electronics, 2021, 69(4): 3810-3821. |
| 29 | Featherstone R, Orin D. Robot dynamics: equations and algorithms[C]∥IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 2000: 826-834. |
| 30 | Zuo Z, Han Q L, Ning B. Fixed-time Cooperative Control of Multi-agent Systems[M]. Cham, Switzerland: Springer International Publishing, 2019. |
| 31 | Cole K, Wickenheiser A M. Reactive trajectory generation for multiple vehicles in unknown environments with wind disturbances[J]. IEEE Transactions on Robotics, 2018, 34(5): 1333-1348. |
| 32 | Million E. The hadamard product[J]. Course Notes, 2007, 3(6): 1-7. |
| [1] | 于雅静,郭健,王荣浩,秦伟,宋明武,向峥嵘. 基于状态观测器的多四旋翼无人机时变编队控制[J]. 吉林大学学报(工学版), 2023, 53(3): 871-882. |
| [2] | 齐国元,李阔,王琨. 基于补偿函数观测器的四旋翼无人机姿态受限控制[J]. 吉林大学学报(工学版), 2023, 53(3): 853-862. |
| [3] | 郭洪艳,于文雅,刘俊,戴启坤. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报(工学版), 2023, 53(3): 693-703. |
| [4] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [5] | 申富媛,李炜,蒋栋年. 四旋翼无人机寿命预测和自主维护方法[J]. 吉林大学学报(工学版), 2023, 53(3): 841-852. |
| [6] | 徐卓君,王耀祥,黄兴,彭程. 多无人机地面移动目标搜寻和定位[J]. 吉林大学学报(工学版), 2023, 53(3): 832-840. |
| [7] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [8] | 王小艺,刘迪一,于家斌,何卓昀,赵峙尧. 复杂风场环境下的多旋翼无人机编队故障检测方法[J]. 吉林大学学报(工学版), 2023, 53(3): 823-831. |
| [9] | 齐国元,陈浩. 基于观测器的四旋翼控制-抗扰-避障一体化[J]. 吉林大学学报(工学版), 2023, 53(3): 810-822. |
| [10] | 潘弘洋,刘昭,杨波,孙庚,刘衍珩. 基于新一代通信技术的无人机系统群体智能方法综述[J]. 吉林大学学报(工学版), 2023, 53(3): 629-642. |
| [11] | 鲜斌,李杰奇,古训. 基于非线性扰动观测器的无人机地面效应补偿[J]. 吉林大学学报(工学版), 2022, 52(8): 1926-1933. |
| [12] | 李昂,杨泓渊,雷小萌,宋凯文,千承辉. 基于等效连杆模型的六足机器人行进姿态闭环控制[J]. 吉林大学学报(工学版), 2022, 52(7): 1696-1708. |
| [13] | 朱航,于瀚博,梁佳辉,李宏泽. 基于电场模型的无人机搜寻改进算法及仿真分析[J]. 吉林大学学报(工学版), 2022, 52(12): 3029-3038. |
| [14] | 曲优,李文辉. 基于锚框变换的单阶段旋转目标检测方法[J]. 吉林大学学报(工学版), 2022, 52(1): 162-173. |
| [15] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
|
||