吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (12): 3852-3861.doi: 10.13229/j.cnki.jdxbgxb.20240361
• 交通运输工程·土木工程 • 上一篇
单全球导航卫星系统信号下基于自监督双向长短时记忆网络的车辆速度估计方法
田婧( ),马社强(),赵丹,陈发城
),马社强(),赵丹,陈发城
- 中国人民公安大学 交通管理学院,北京 100038
Vehicle travel speed estimation based on self⁃supervised long short⁃term memory network under single global navigation satellite system signal
Jing TIAN(),She-qiang MA(),Dan ZHAO,Fa-cheng CHEN
- School of Transportation Management,People's Public Security University of China,Beijing 100038,China
摘要:
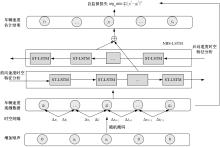
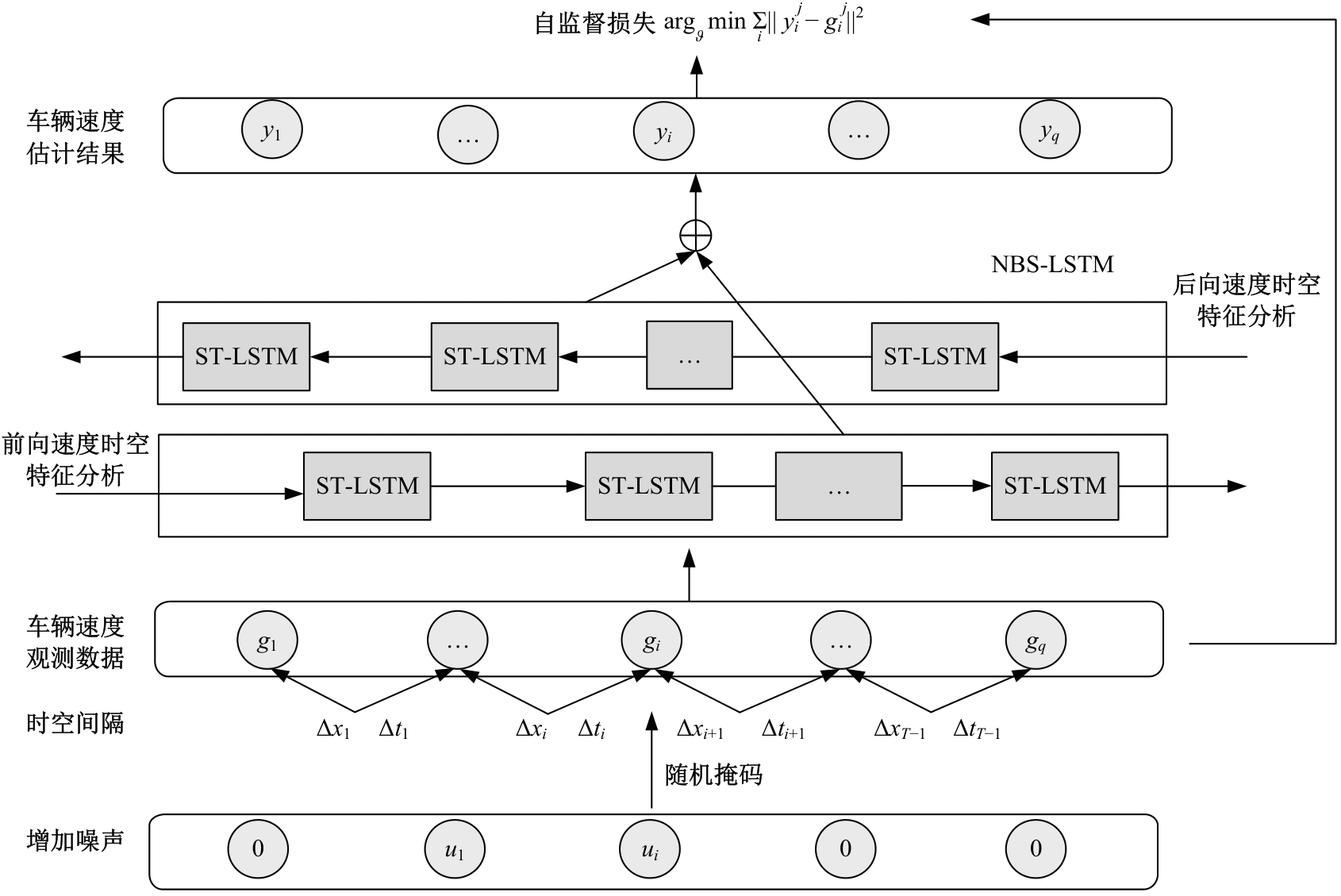
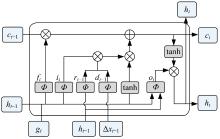
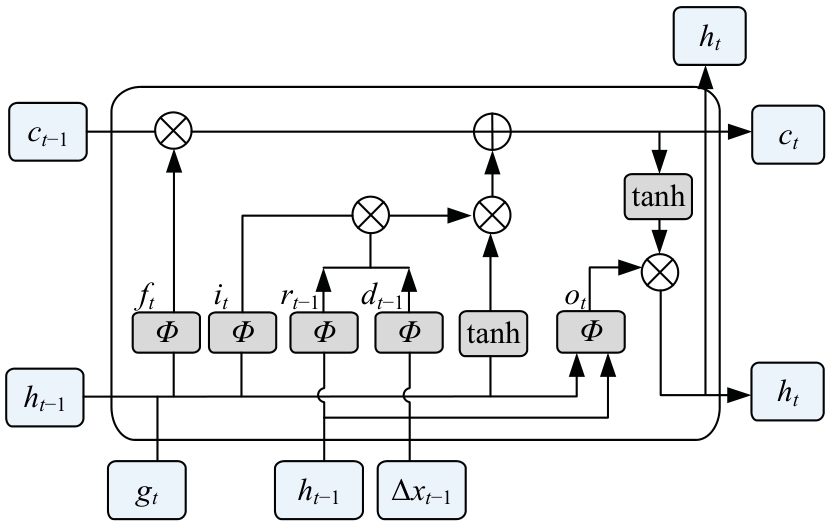
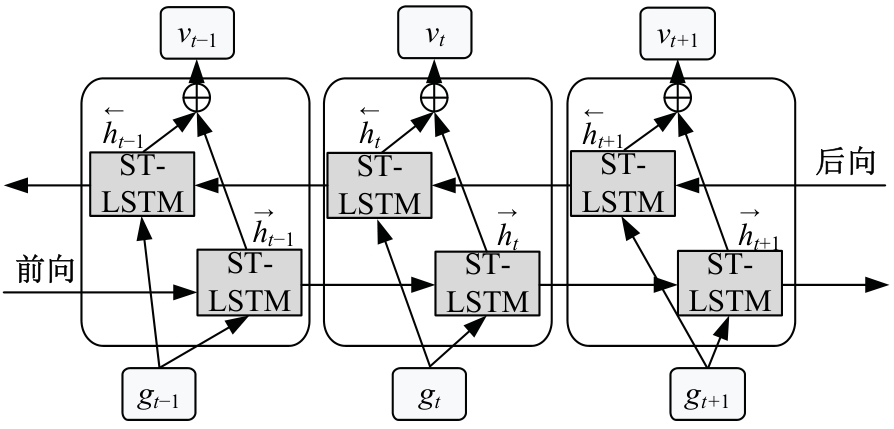
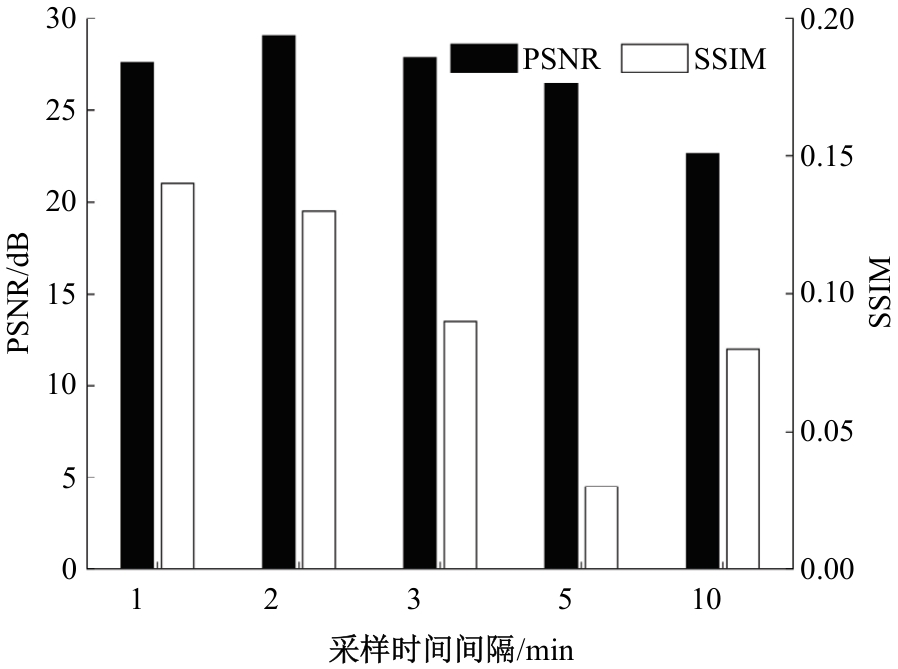
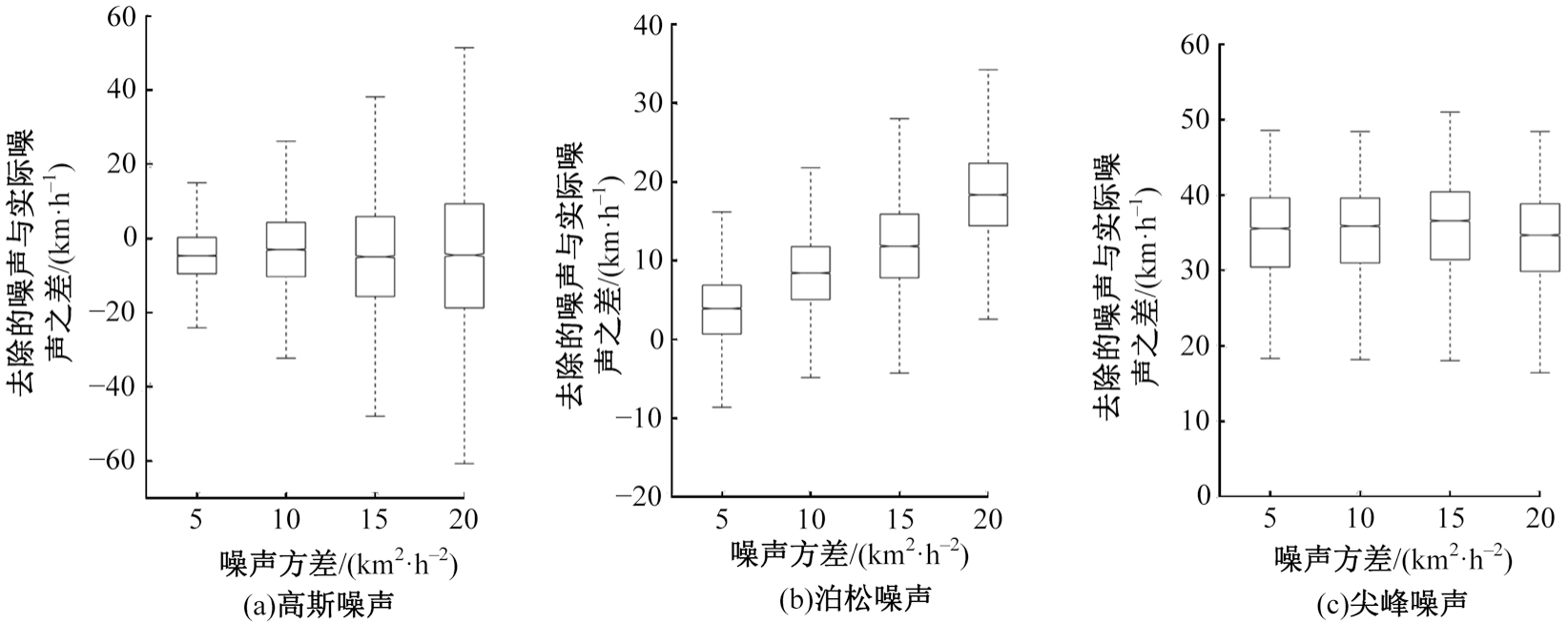
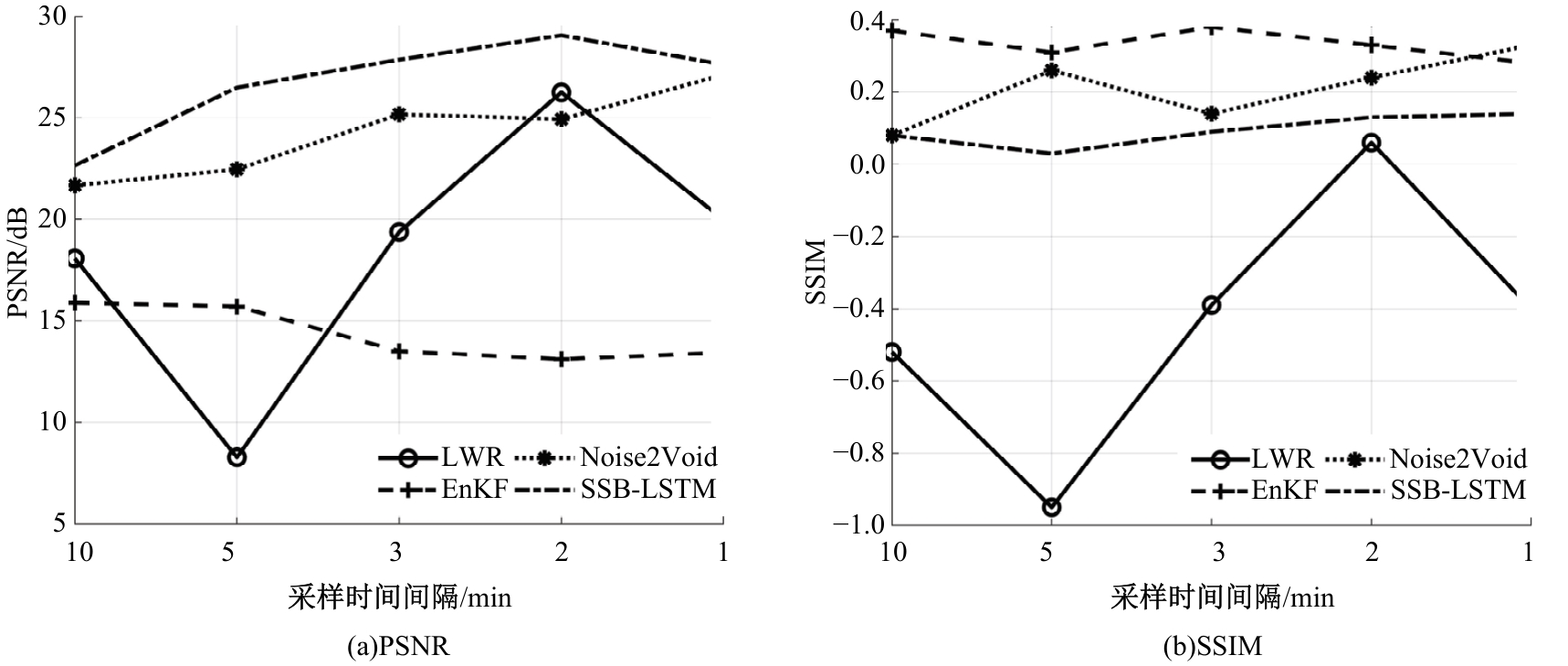
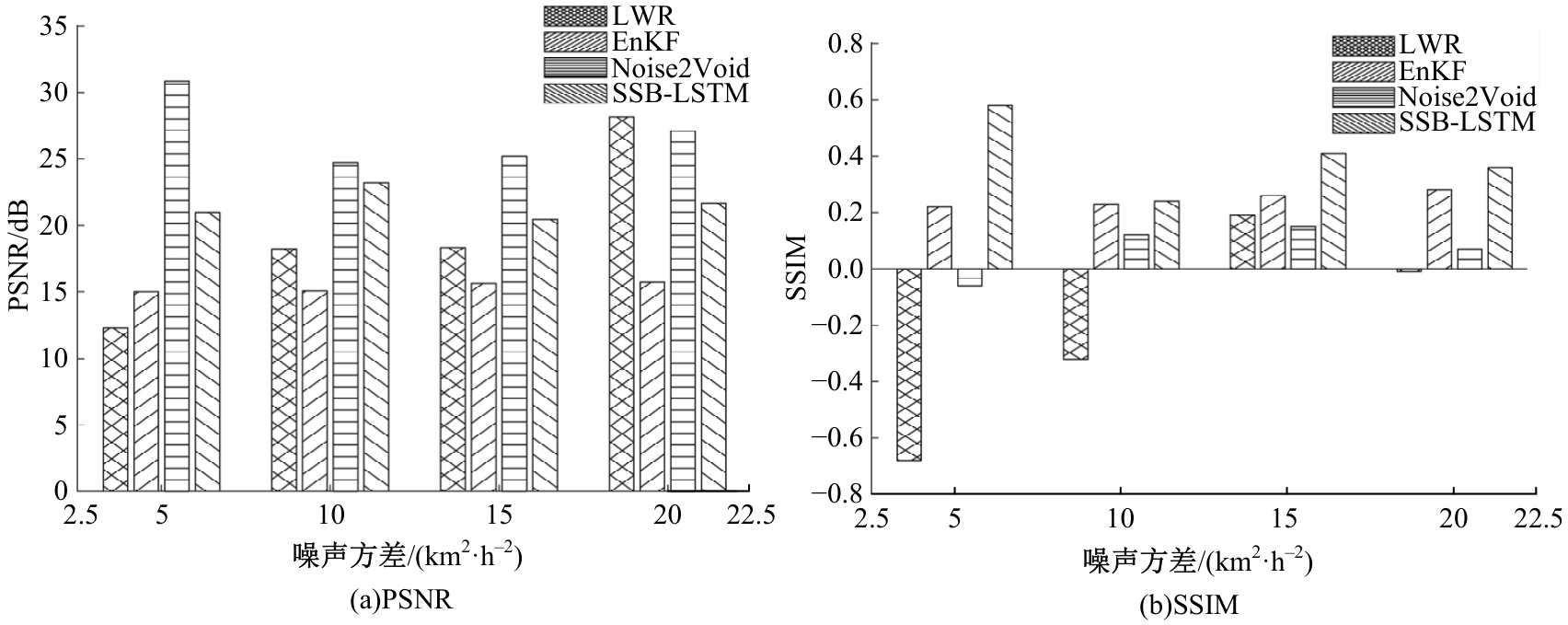
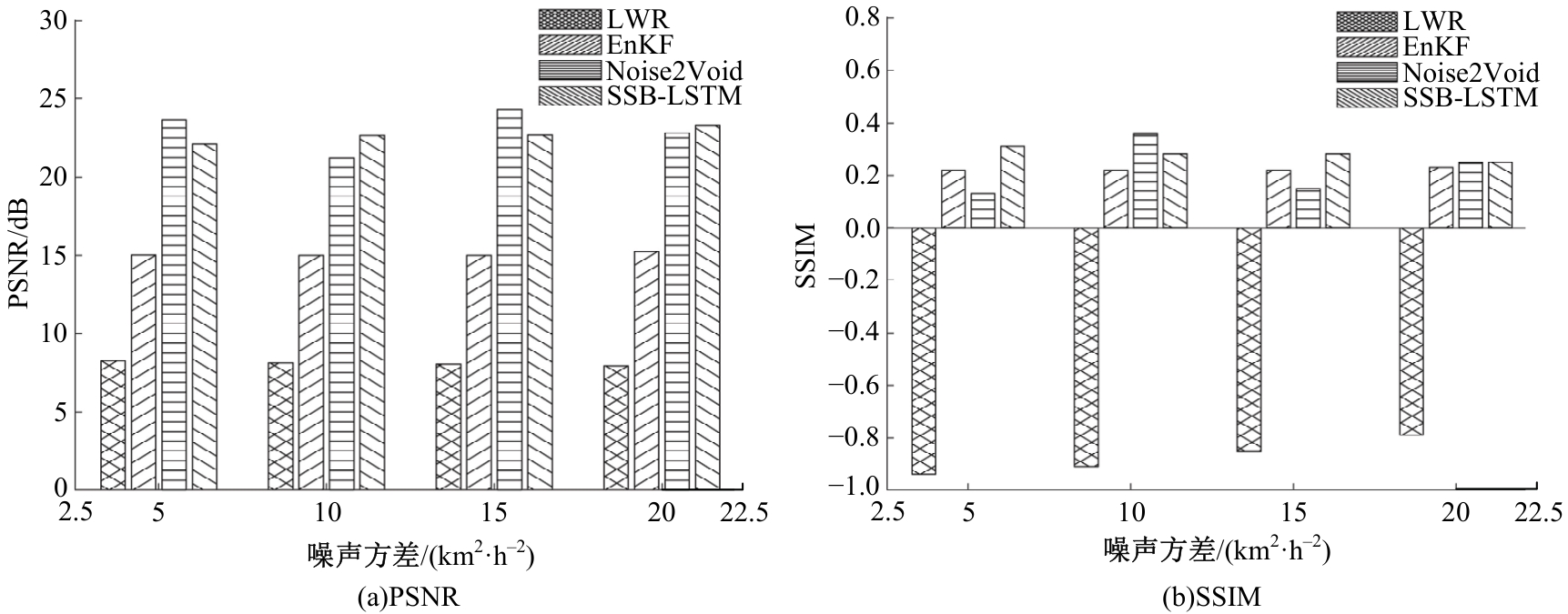
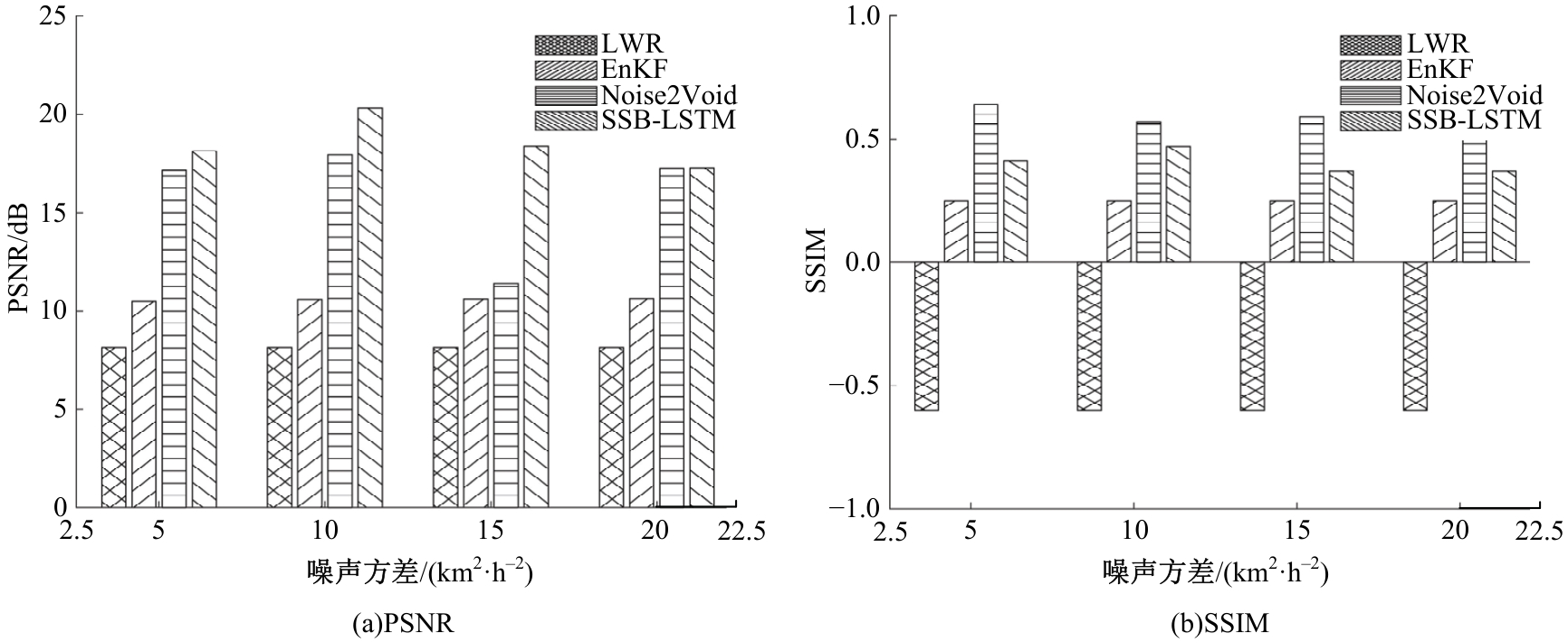
单全球导航卫星系统(GNSS)环境下车辆速度检测存在显著噪声干扰,且数据采样的稀疏性会加剧速度计算的不稳定性。为此,将单GNSS下车辆速度估计构建为基于时空相关性的速度期望优化问题,并提出一种自监督双向长短时记忆(LSTM)算法求解。首先,该算法构建稀疏数据时空特征提取LSTM网络,引入时间门和空间门控函数来分析稀疏、不等间距的车辆检测数据中速度时空关联的变化,提取速度时空特征嵌入向量;其次,噪声双向抑制的车辆速度估计LSTM网络分别从前向、后向来分析车辆速度变化趋势,准确实现噪声清除与速度估计;最后,以GPS信号为例对算法的车辆速度估计性能进行了实验验证,结果表明:提出的算法在采样间隔为1~10 min的稀疏数据下,去除速度数据中的噪声平均值为26.73 dB PSNR,与LWR、EnKF、Noise2Void算法相比平均高28.93%,估计速度的准确度平均高2.02%。
中图分类号:
- U149.41






| [1] | 闵海根, 方煜坤, 吴霞, 等. 弱GNSS信号下基于EMD和LSTM的车辆位置预测方法研究[J]. 中国公路学报, 2021, 34(7): 128-139. |
| Min Hai-gen, Fang Yu-kun, Wu Xia, et al. Position prediction based on empirical mode decomposition and long short-term memory under global navigation satellite system outages[J]. China Journal of Highway and Transport, 2021, 34(7): 128-139. | |
| [2] | Shen C, Zhang Y, Tang J, et al. Dual-optimization for a MEMS-INS/GPS system during GPS outages based on the cubature Kalman filter and neural networks[J]. Mechnical Systems and Signal Processing, 2019, 133:No. 106222. |
| [3] | Yao Y Q, Xu X S, Zhu C C, et al. A hybrid fusion algorithm for GPS/INS integration during GPS outages[J]. Measurement, 2017, 103: 42-51. |
| [4] | Lehtinen J, Munkberg J, Hasselgren J, et al. Noise2Noise: learning image restoration without clean data[C]∥International Conference on Machine Learning, Stockholm, Sweden, 2018: 2965-2974. |
| [5] | Moran N, Dan S, Yu Z, et al. Noisier2Noise: learning to denoise from unpaired noisy data[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Seattle, USA,2020: 12061-12069. |
| [6] | Krull A, Buchholz T O, Jug F. Noise2Void-Learning denoising from single noisy images[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 2124-2132. |
| [7] | 刘雪梅, 程彭圣男, 李海瑞, 等.基于字词向量的BiLSTM-CRF水利工程巡检文本实体识别模型[J]. 华北水利水电大学学报: 自然科学版, 2023(3): 9-17. |
| Liu Xue-mei, Sheng-nan Chengpeng, Li Hai-rui, et al. Research on text entity recognition for water project inspection based on word-character vector BiLSTM-CRF[J]. Journal of North China University of Water Resources and Electric Power, 2023(3): 9-17. | |
| [8] | 崔丽霞, 许利显. 基于Bi LSTM-CTC的语音识别系统研究[J].自动化与仪器仪表, 2023 (10): 90-94. |
| Cui Li-xia, Xu Li-xian. Research on speech recognition system based on BiLSTM-CTC[J]. Automation & Instrumentation, 2023 (10):90-94. | |
| [9] | 苏兆品, 张羚, 张国富, 等. 基于多特征融合和BiLSTM的语音隐写检测算法[J]. 电子学报, 2023, 51(5): 1300-1309. |
| Su Zhao-pin, Zhang Ling, Zhang Guo-fu, et al. A speech steganalysis algorithm based on multi-feature fusion and BiLSTM[J]. Acta Electronica Sinica, 2023, 51(5): 1300-1309. | |
| [10] | 付翔, 肖帅, 徐超. 轮毂电动机驱动车辆并联式复合制动策略[J]. 江苏大学学报: 自然科学版, 2025, 46(1): 9-17. |
| Fu Xiang, Xiao Shuai, Xu Chao. Parallel compound braking strategy of vehicle driven by wheel motor[J]. Journal of Jiangsu University(Natural Science Edition), 2025, 46(1): 9-17. | |
| [11] | Guo S, Yan Z F, Zhang K, et al. Toward convolutional blind denoising of real photographs[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 1712-1722. |
| [12] | He K M, Chen X L, Xie S N, et al. Masked autoencoders are scalable vision learners[C]∥IEEE Conference on Computer Vision and Pattern Recognition, New Orleans,USA,2022: 15979-15988. |
| [13] | Cui Z Y, Ke R M, Pu Z Y, et al. Stacked bidirectional and unidirectional LSTM recurrent neural network for forecasting network-wide traffic state with missing values[J]. Transportation Research Part C: Emerging Technologies, 2020, 118(9): No.102674. |
| [14] | Lv Y S, Duan Y J, Kang W W, et al. Traffic flow prediction with big data: a deep learning approach[J]. IEEE Transactions Intelligent Transportation Systems, 2015, 16(2): 865-873. |
| [15] | Do L N N, Vu H L, Vo B Q, et al. An effective spatial-temporal attention based neural network for traffic flow prediction[J]. Transportation Research Part C: Emerging Technologies, 2019(108): 12-28. |
| [16] | 贾现广, 冯超琴, 苏治文, 等.城市交通网格集群的Bi-LSTM的流量预测[J]. 重庆大学学报, 2023, 46(9): 130-141. |
| Jia Xian-guang, Feng Chao-qin, Su Zhi-wen, et al. Forecasting for urban traffic grid clusters based on Bi-LSTM[J]. Jounal of Chongqing University, 2023, 46(9):130-141. | |
| [17] | Graves A, Jaitly N, Mohamed A R. Hybrid speech recognition with deep bidirectional lstm[C]∥IEEE Workshop on Automatic Speech Recognition and Understanding, Olomouc, Czech Republic, 2013: 273-278. |
| [1] | 田婧,马社强,宋现敏,赵丹,陈发城. 稀疏数据下的交通状态估计自适应卷积网络[J]. 吉林大学学报(工学版), 2025, 55(8): 2579-2587. |
| [2] | 曹洁,苏广,张红,李鹏辉. CapsNet融合D-BiLSTM的区域复杂路网交通速度预测[J]. 吉林大学学报(工学版), 2024, 54(9): 2531-2539. |
| [3] | 白琳,刘林军,李轩昂,吴沙,刘汝庆. 基于自监督学习的单目图像深度估计算法[J]. 吉林大学学报(工学版), 2023, 53(4): 1139-1145. |
| [4] | 赵宏伟,张健荣,朱隽平,李海. 基于对比自监督学习的图像分类框架[J]. 吉林大学学报(工学版), 2022, 52(8): 1850-1856. |
| [5] | 周大可,张超,杨欣. 基于多尺度特征融合及双重注意力机制的自监督三维人脸重建[J]. 吉林大学学报(工学版), 2022, 52(10): 2428-2437. |
|
||