吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (5): 1651-1663.doi: 10.13229/j.cnki.jdxbgxb20200401
• 交通运输工程·土木工程 • 上一篇
基于车道选择及行车轨迹的左转导向线设置方法
姚荣涵1( ),祁文彦1,郑刘杰1,曲大义1,2()
),祁文彦1,郑刘杰1,曲大义1,2()
- 1.大连理工大学 交通运输学院,辽宁 大连 116024
2.青岛理工大学 机械与汽车工程学院,山东 青岛 266520
Settings of guiding markings for left⁃turning vehicles based on lane selection and vehicle trajectory
Rong-han YAO1(),Wen-yan QI1,Liu-jie ZHENG1,Da-yi QU1,2()
- 1.School of Transportation and Logistics,Dalian University of Technology,Dalian 116024,China
2.School of Mechanical & Automotive Engineering,Qingdao University of Technology,Qingdao 266520,China
摘要:
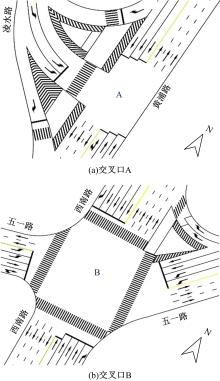
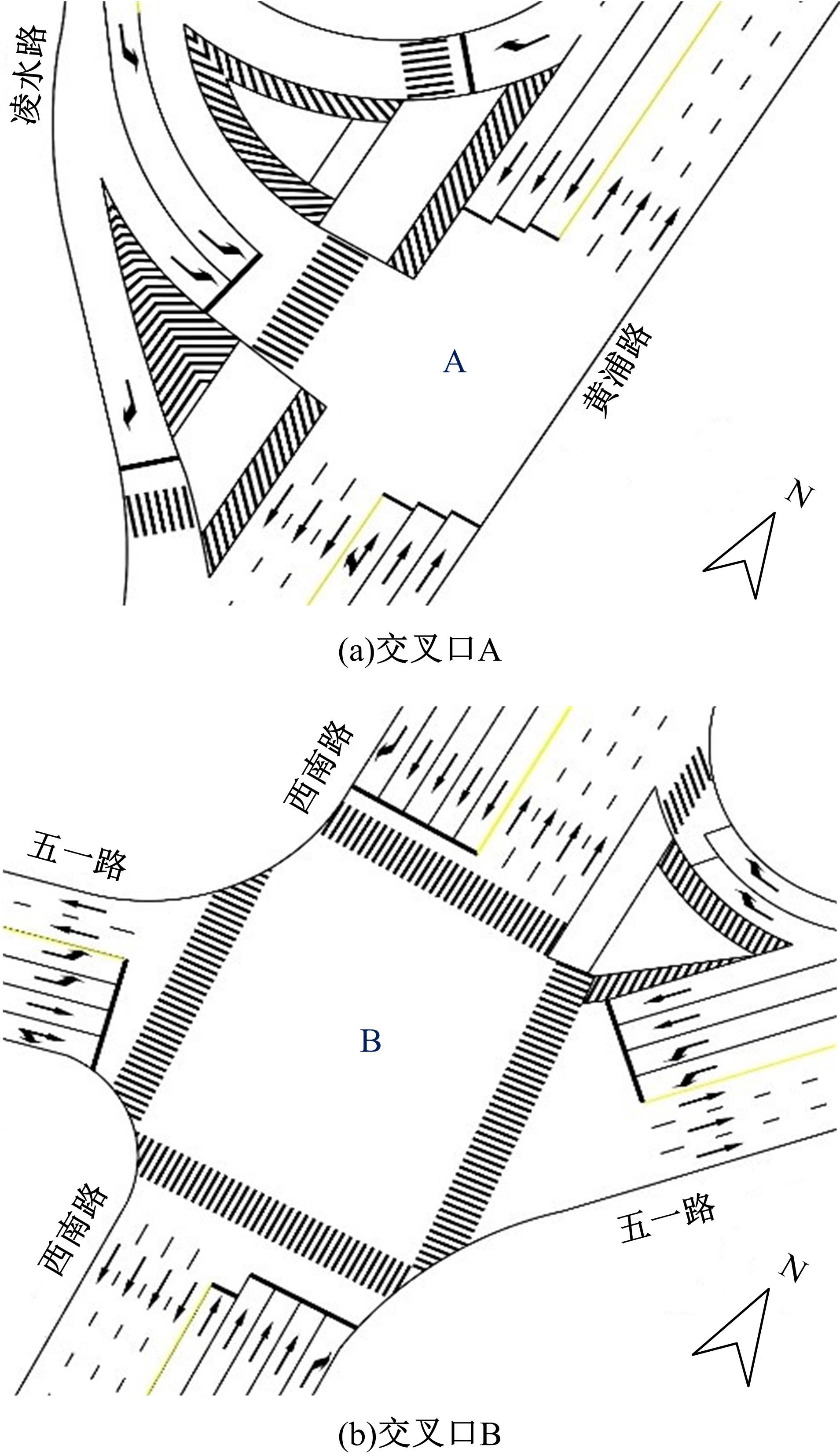
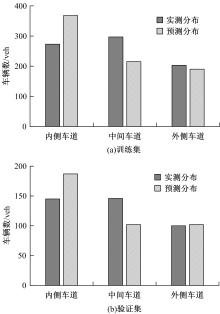
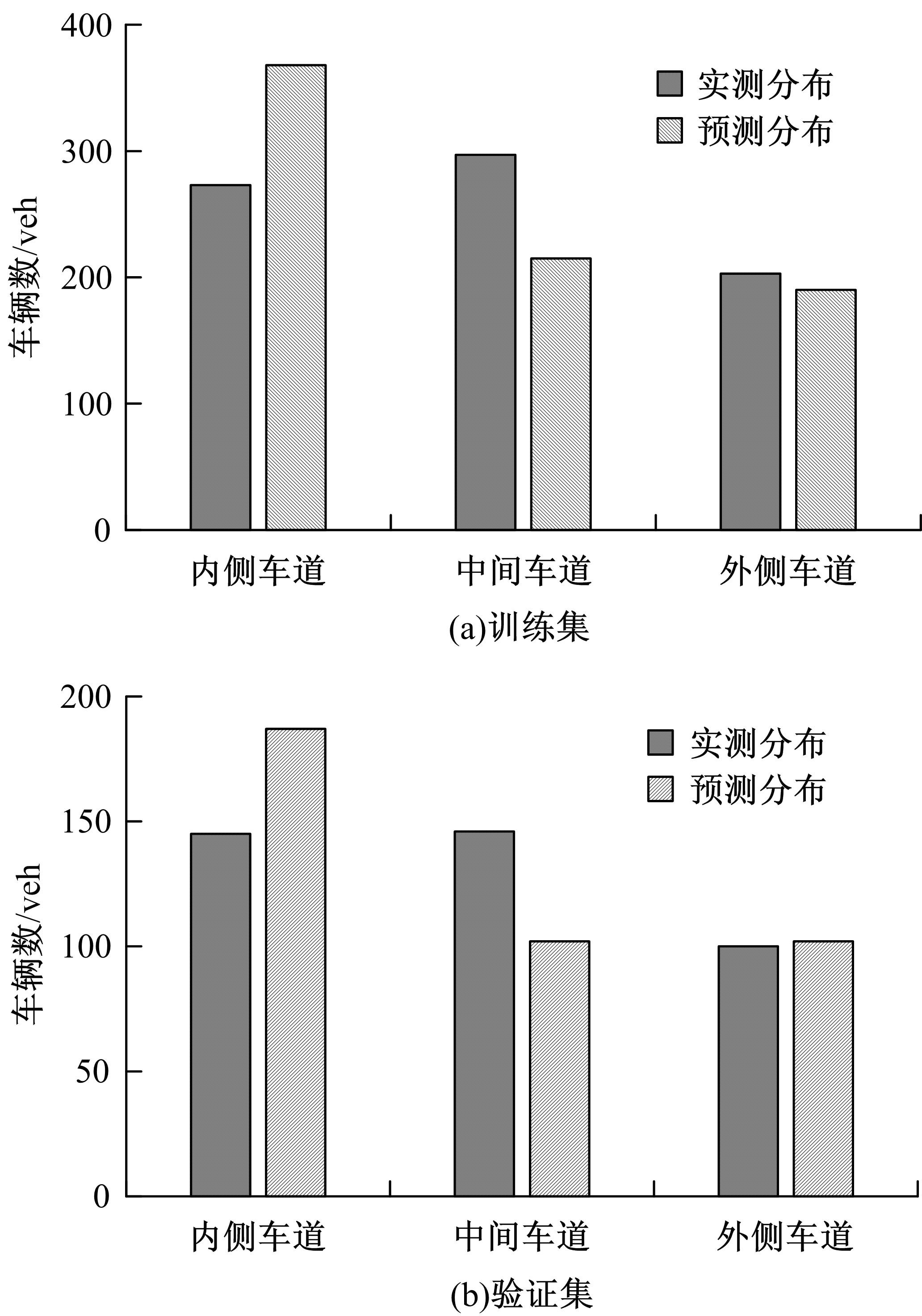
为利用左转导向线提升交叉口车流运行安全和效率,分析了左转车辆从进口道至出口道的车道选择行为和行驶轨迹特点。根据随机效用理论建立了左转车辆出口车道选择模型,采用圆曲线和平曲线构建了左转车辆行驶轨迹模型,并提出两种左转导向线线型和3种左转车流引导方式。搭建交通仿真模型,对6种设计方案进行比选,分析了车型比例对引导效果的影响。结果发现:车辆所处进口车道、自身车型、转弯角度、同车道前车车型均显著影响左转车辆的出口车道选择行为;平曲线和圆曲线均适用于规则和不规则交叉口;设置平曲线引导左转车辆运行不仅可规范车流运行秩序而且可提升车流运行性能;为平衡通行效率和停车次数,不宜设置过多的导向线;这些结论不受车型比例影响。在城市道路交叉口,建议使用平曲线对左转车流设置导向线。当左转车道不止一条时,建议至少设置两条左转导向线。
中图分类号:
- U491


| 1 | Gipps P G. A model for the structure of lane-changing decisions [J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. |
| 2 | Nevers B L, Rouphail N M. Field evaluation of lane selection strategies at signalized intersections[J]. Journal of Transportation Engineering, 2002, 128(3): 224-231. |
| 3 | Toledo T, Koutsopoulos H N, Ben-Akiva M. Integrated driving behavior modeling[J]. Transportation Research Part C: Emerging Technologies, 2007, 15(2): 96-112. |
| 4 | 徐慧智, 程国柱, 裴玉龙. 车道变换行为对道路通行能力影响的研究[J]. 中国科技论文在线, 2010, 5(10): 749-753. |
| Xu Hui-zhi, Cheng Guo-zhu, Pei Yu-long. Study on effect of lane-changing behavioral characteristic to capacity[J]. Sciencepaper Online, 2010, 5(10): 749-753. | |
| 5 | 李志慧, 汪昆维, 宋现敏, 等. 基于车道选择特性的环形交叉口行程时间预测[J]. 吉林大学学报: 工学版, 2017, 47(5): 1411-1419. |
| Li Zhi-hui, Wang Kun-wei, Song Xian-min, et al. Roundabout travel time prediction based on characteristics of lane choosing[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(5): 1411-1419. | |
| 6 | 周红媚, 孙叶, 徐秀娟. 基于随机效用理论的城市道路车辆自由换道行为研究[J]. 交通运输研究, 2017, 3(2): 9-16. |
| Zhou Hong-mei, Sun Ye, Xu Xiu-juan. Behavior of discretionary lane changing on urban streets based on random utility theory[J]. Transport Research, 2017, 3(2): 9-16. | |
| 7 | Sando T, Ren M. Influence of intersection geometrics on the operation of triple left-turn lanes[J]. Journal of Transportation Engineering, 2009, 135(5): 253-259. |
| 8 | Yun M, Ji J, Chen Z. Lane change behavior at weaving section of signalized intersection upstream[C]∥Proceedings of the Fourth International Conference on Transportation Engineering. Reston VA: American Society of Civil Engineers. 2013: 1229-1234. |
| 9 | 曹弋, 杨忠振, 左忠义, 等. 绿灯倒计时信号对驾驶行为的影响[J]. 中国安全科学学报, 2015, 25(2): 77-82. |
| Cao Yi, Yang Zhong-zhen, Zuo Zhong-yi, et al. Influence of countdown signal of green light on driving behavior[J]. China Safety Science Journal, 2015, 25(2): 77-82. | |
| 10 | Choudhury C F, Ben-Akiva M E. A lane selection model for urban intersections[J]. Transportation Research Record: Journal of the Transportation Research Board, 2008, 2088: 167-176. |
| 11 | Peng J, Guo Y, Fu R, et al. Multi-parameter prediction of drivers' lane-changing behaviour with neural network model[J]. Applied Ergonomics, 2015, 50: 207-217. |
| 12 | 杨龙海, 罗沂, 徐洪. 基于GPS定位数据的高速公路换道特征分析与行为识别[J]. 北京交通大学学报, 2017, 41(3): 39-46. |
| Yang Long-hai, Luo Yi, Xu Hong. Analysis and recognition of highway lane-changing behavior characteristics based on GPS location data[J]. Journal of Beijing Jiaotong University, 2017, 41(3): 39-46. | |
| 13 | 裴玉龙, 张银. 车道变换期望运行轨迹仿真[J]. 交通信息与安全, 2008, 26(4): 68-71. |
| Pei Yu-long, Zhang Yin. Lane-changing virtual desire trajectory simulation[J]. Journal of Transport Information and Safety, 2008, 26(4): 68-71. | |
| 14 | 曲昭伟, 白乔文, 陈永恒, 等. 无专用左转相位十字形交叉口左转导向线计算模型[J]. 吉林大学学报: 工学版, 2017, 47(2): 414-419. |
| Qu Zhao-wei, Bai Qiao-wen, Chen Yong-heng, et al. Model of left-turn guide line at right-angled intersection with permitted left-turning phase[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(2): 414-419. | |
| 15 | 南春丽, 张生瑞, 严宝杰. 基于停车线位置的左转车辆行驶轨迹仿真模型[J]. 计算机工程与应用, 2009, 45(9): 24-27. |
| Chun-li Nan, Zhang Sheng-rui, Yan Bao-jie. Traveling trace simulation model for left turn vehicles based on stop line[J]. Computer Engineering and Applications, 2009, 45(9): 24-27. | |
| 16 | 徐慧智, 裴玉龙, 程国柱. 基于期望运行轨迹的车道变换行为安全性分析[J]. 中国安全科学学报, 2010, 20(1): 90-95, 180. |
| Xu Hui-zhi, Pei Yu-long, Cheng Guo-zhu. Study on the safety of lane changing based on virtual desire trajectory[J]. China Safety Science Journal, 2010, 20(1): 90-95, 180. | |
| 17 | Alhajyaseen W K M, Asano M, Nakamura H, et al. Stochastic approach for modeling the effects of intersection geometry on turning vehicle paths[J]. Transportation Research Part C: Emerging Technologies, 2013, 32: 179-192. |
| 18 | . 城市道路交通标志和标线设置规范[S]. |
| 19 | Wei F, Guo W, Liu X, et al. Left-turning vehicle trajectory modeling and guide line setting at the intersection[J]. Discrete Dynamics in Nature and Society, 2014(11): 1-7. |
| 20 | Qu Z W, Bai Q W, Chen Y H, et al. Optimal design of left-lane line extensions considering non-yielding maneuvers at the beginning of the permitted phase[J]. Journal of Southeast University(English Edition), 2018, 34(1): 120-126. |
| 21 | 关宏志. 非集计模型—交通行为分析的工具[M]. 北京: 人民交通出版社, 2004. |
| 22 | . 道路交通标志和标线 第3部分:道路交通标线[S]. |
| 23 | 杨少伟. 道路勘测设计[M]. 2版. 北京: 人民交通出版社, 2009. |
| [1] | 白乔文,曲昭伟,陈永恒,熊帅,陶楚青. 非严格优先权下无左转专用相位直行车辆轨迹模型建立[J]. 吉林大学学报(工学版), 2019, 49(3): 673-679. |
| [2] | 徐洪峰, 高霜霜, 郑启明, 章琨. 信号控制交叉口的复合动态车道管理方法[J]. 吉林大学学报(工学版), 2018, 48(2): 430-439. |
| [3] | 宋现敏, 邓晓磊, 高铭, 曲昭伟. 基于动态反应时间的全速度差模型[J]. 吉林大学学报(工学版), 2017, 47(6): 1703-1709. |
| [4] | 曲昭伟, 白乔文, 陈永恒, 曹宁博, 康萌, 魏福禄. 无专用左转相位十字形交叉口左转导向线计算模型[J]. 吉林大学学报(工学版), 2017, 47(2): 414-419. |
| [5] | 李显生, 李明明, 任有, 严佳晖, 陈小夏. 城市不同道路线形下的驾驶人注视特性[J]. 吉林大学学报(工学版), 2016, 46(5): 1447-1452. |
| [6] | 徐洪峰, 章琨, 姚荣涵. 环形交叉口的所有进口道适时交通信号控制策略[J]. 吉林大学学报(工学版), 2016, 46(1): 76-84. |
| [7] | 徐洪峰, 耿现彩, 何龙. 单进口轮流放行方式的四路环形交叉口交通信号控制[J]. 吉林大学学报(工学版), 2014, 44(4): 953-962. |
| [8] | 王霄维, 王殿海, 江晟, 金盛. 基于混合优化模型的平面交叉口控制方法[J]. 吉林大学学报(工学版), 2012, 42(增刊1): 170-174. |
| [9] | 魏丽英,应力天. 基于元胞自动机的自行车交通流仿真建模[J]. 吉林大学学报(工学版), 2011, 41(01): 51-0055. |
| [10] | 刘昕, 王殿海, 王新颖, 宋现敏, 王德民. 基于IPv6的智能交通信息采集与处理方法[J]. 吉林大学学报(工学版), 2010, 40(05): 1225-1229. |
| [11] | 丁建梅,王常虹,蒋贤才. 基于上游出口检测的公交优先信号控制[J]. 吉林大学学报(工学版), 2009, 39(增刊2): 126-0130. |
| [12] | 隗海林, 王劲松, 王云鹏, 俄文娟, 高磊. 基于城市道路工况的汽车燃油消耗模型[J]. 吉林大学学报(工学版), 2009, 39(05): 1146-1150. |
| [13] | 姜桂艳,郭海锋,吴超腾 . 基于感应线圈数据的城市道路 交通状态判别方法 [J]. 吉林大学学报(工学版), 2008, 38(增刊): 37-0042. |
| [14] | 李世武,王云鹏,付建萍,韩立波,宋玉林,郭栋. 基于车辆排放的城市道路交叉口信号配时优化仿真[J]. 吉林大学学报(工学版), 2007, 37(06): 1268-1272. |
| [15] | 王云鹏, 沙学锋, 隗海林, 李强, 李珏. 基于汽车排放评估的交通环境评价方法[J]. 吉林大学学报(工学版), 2004, (1): 118-121. |
|
||