吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (5): 1873-1878.doi: 10.13229/j.cnki.jdxbgxb20200720
• 通信与控制工程 • 上一篇
基于分数阶BICO滤波器的运动控制测量噪声抑制
施昕昕1( ),黄家才2,高芳征1
),黄家才2,高芳征1
- 1.南京工程学院 自动化学院,南京 211167
2.南京工程学院 工业中心,南京 211167
Measuring noise rejection of motion control system based on fractional BICO filter
Xin-xin SHI1(),Jia-cai HUANG2,Fang-zheng GAO1
- 1.School of Automation,Nanjing Institute of Technology,Nanjing 211167,China
2.Industrial Center,Nanjing Institute of Technology,Nanjing 211167,China
摘要:
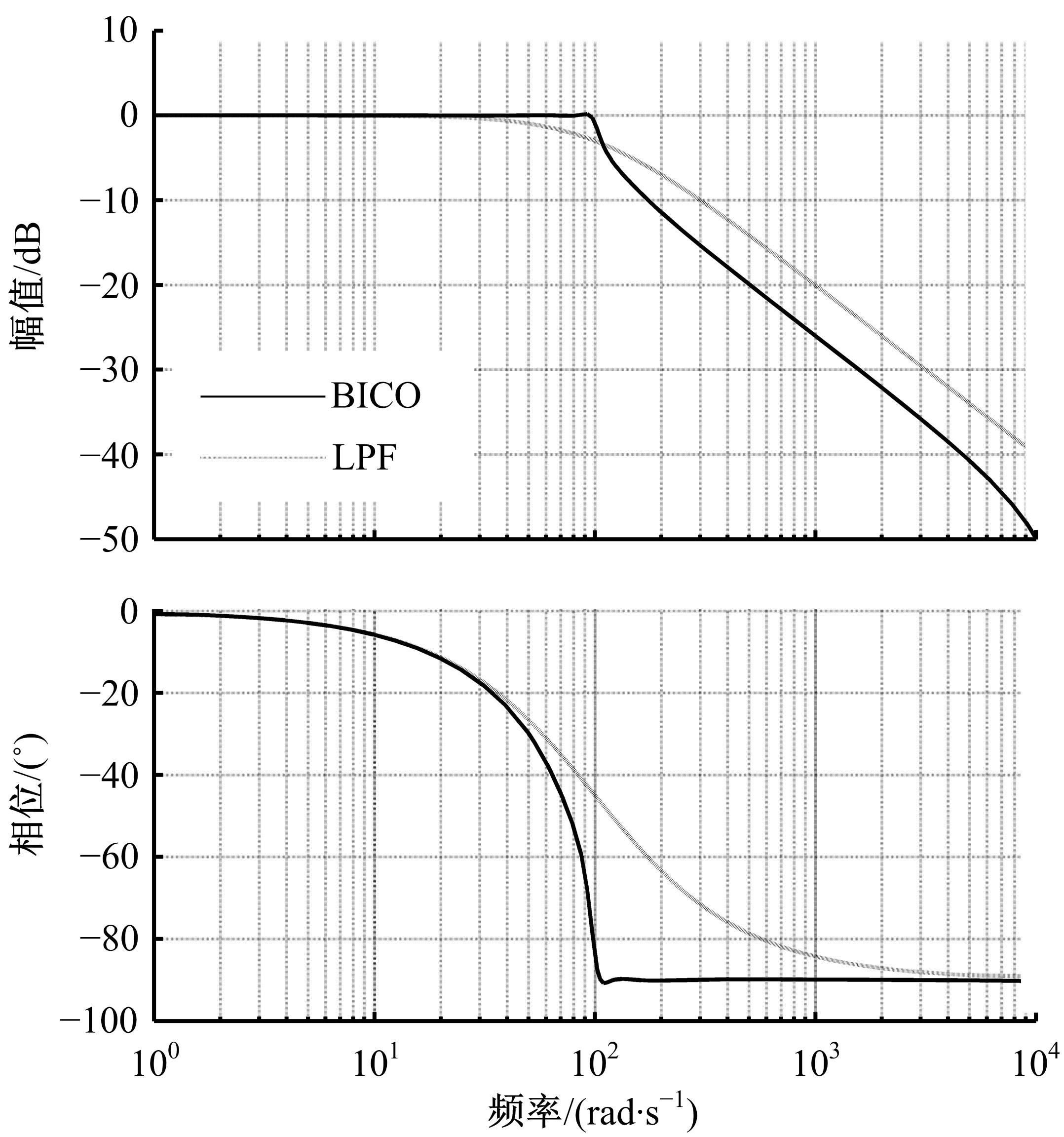
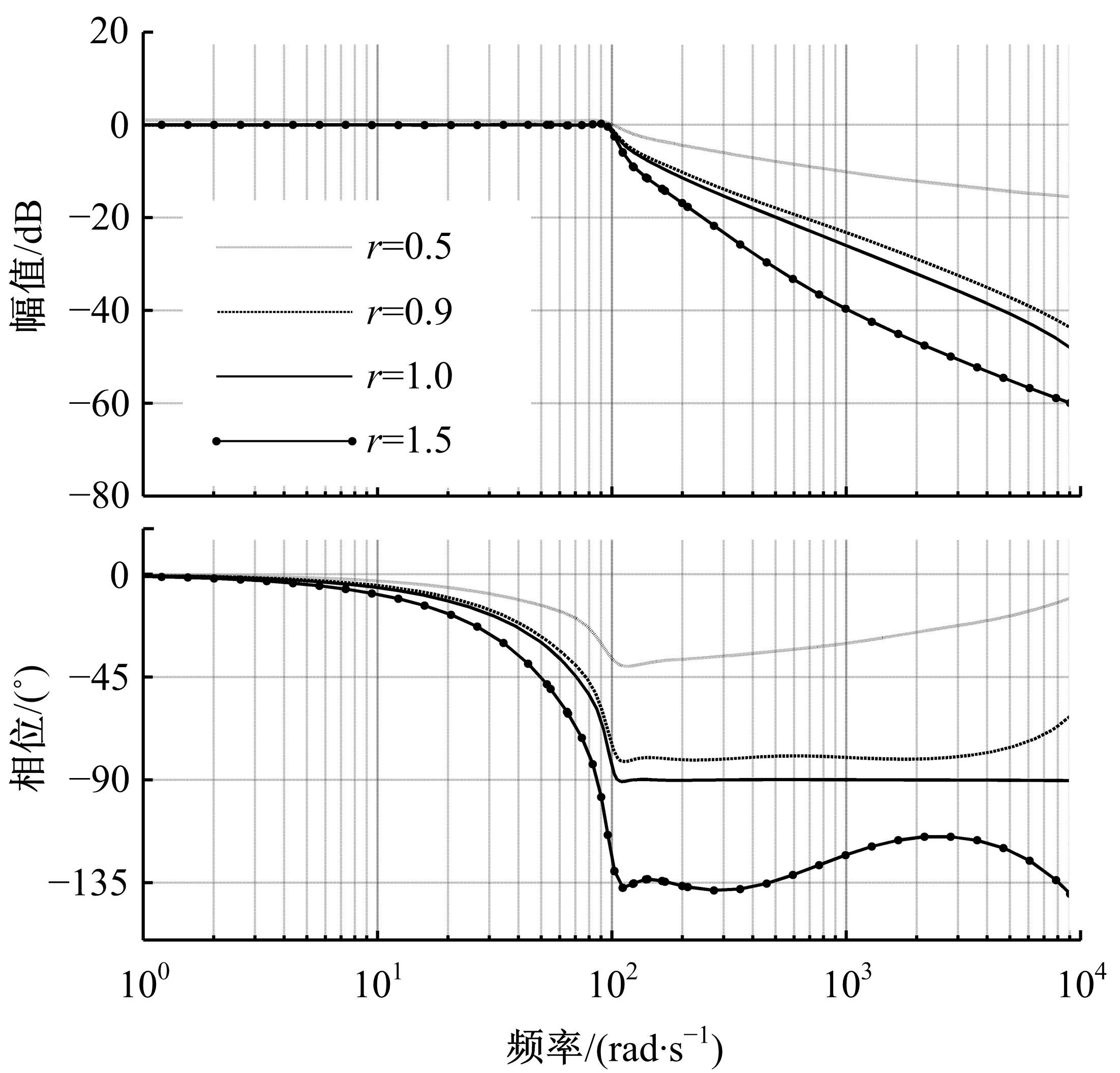
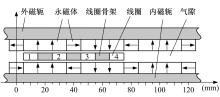
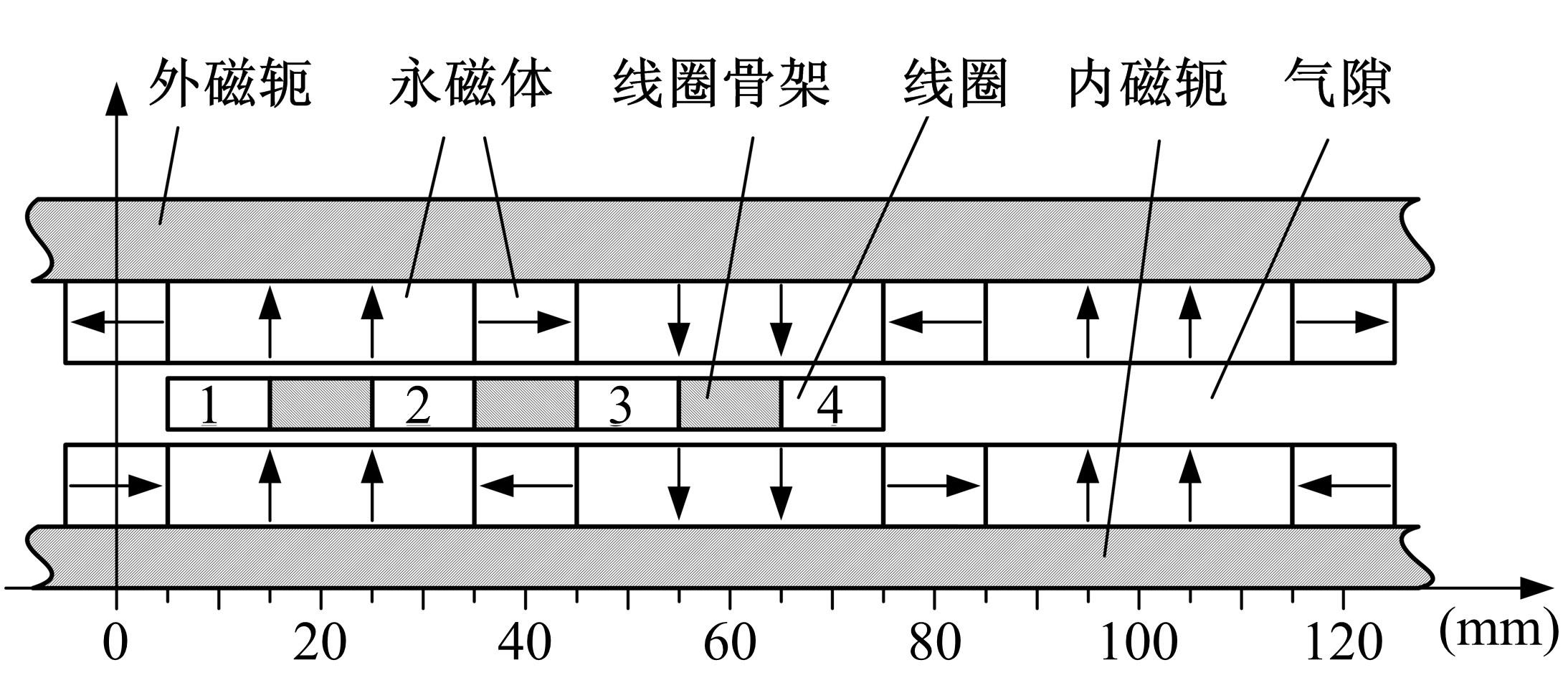
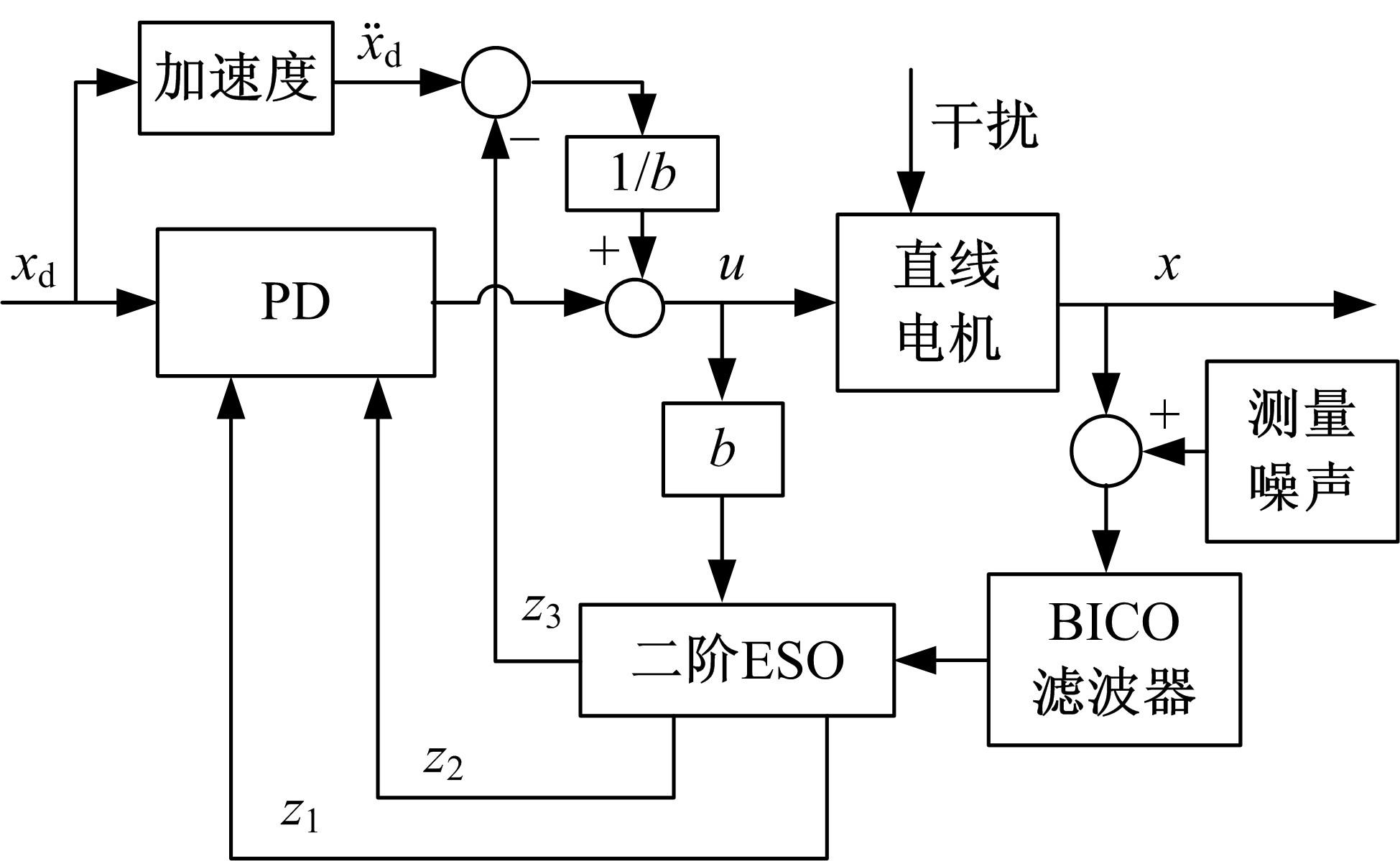
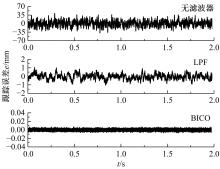
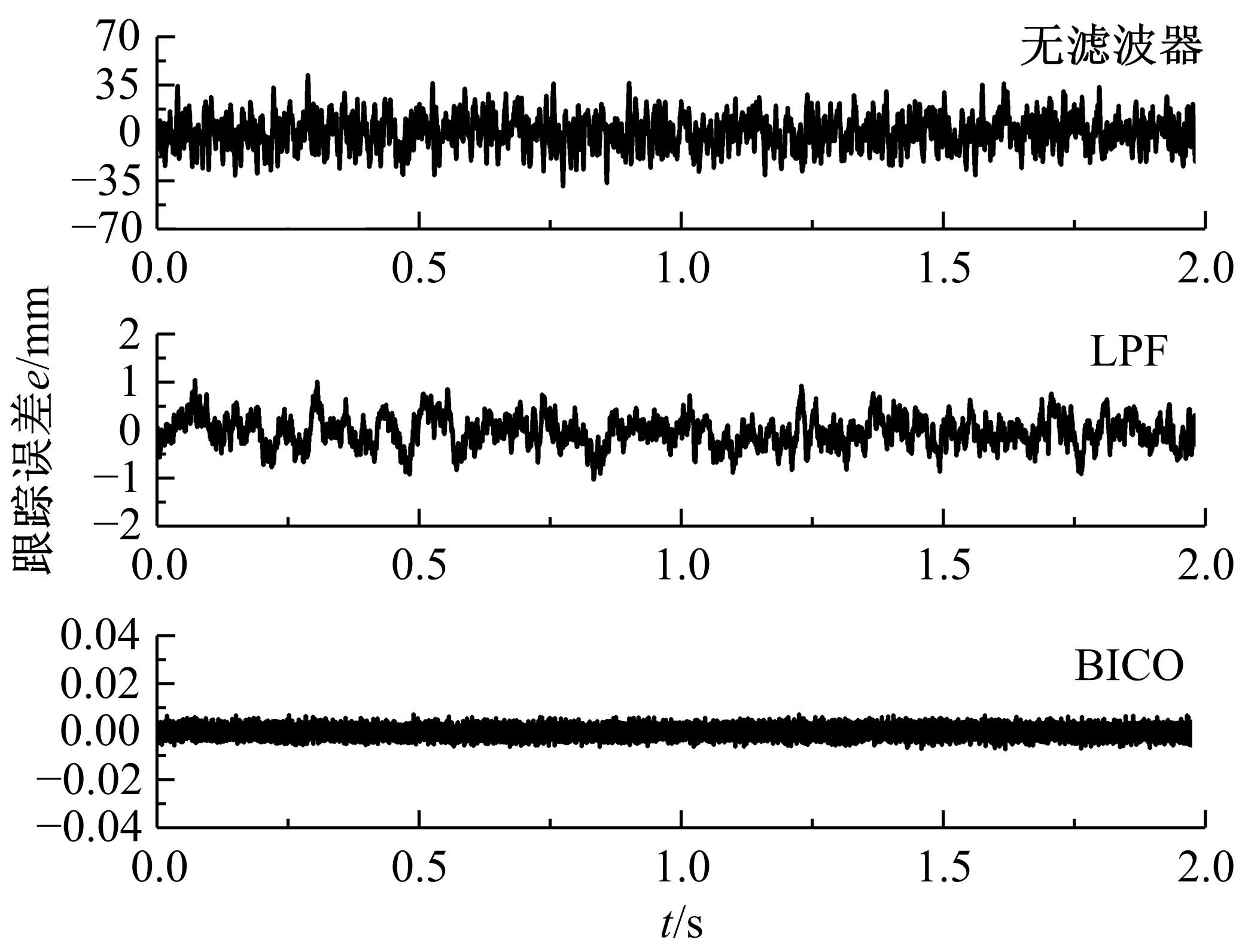
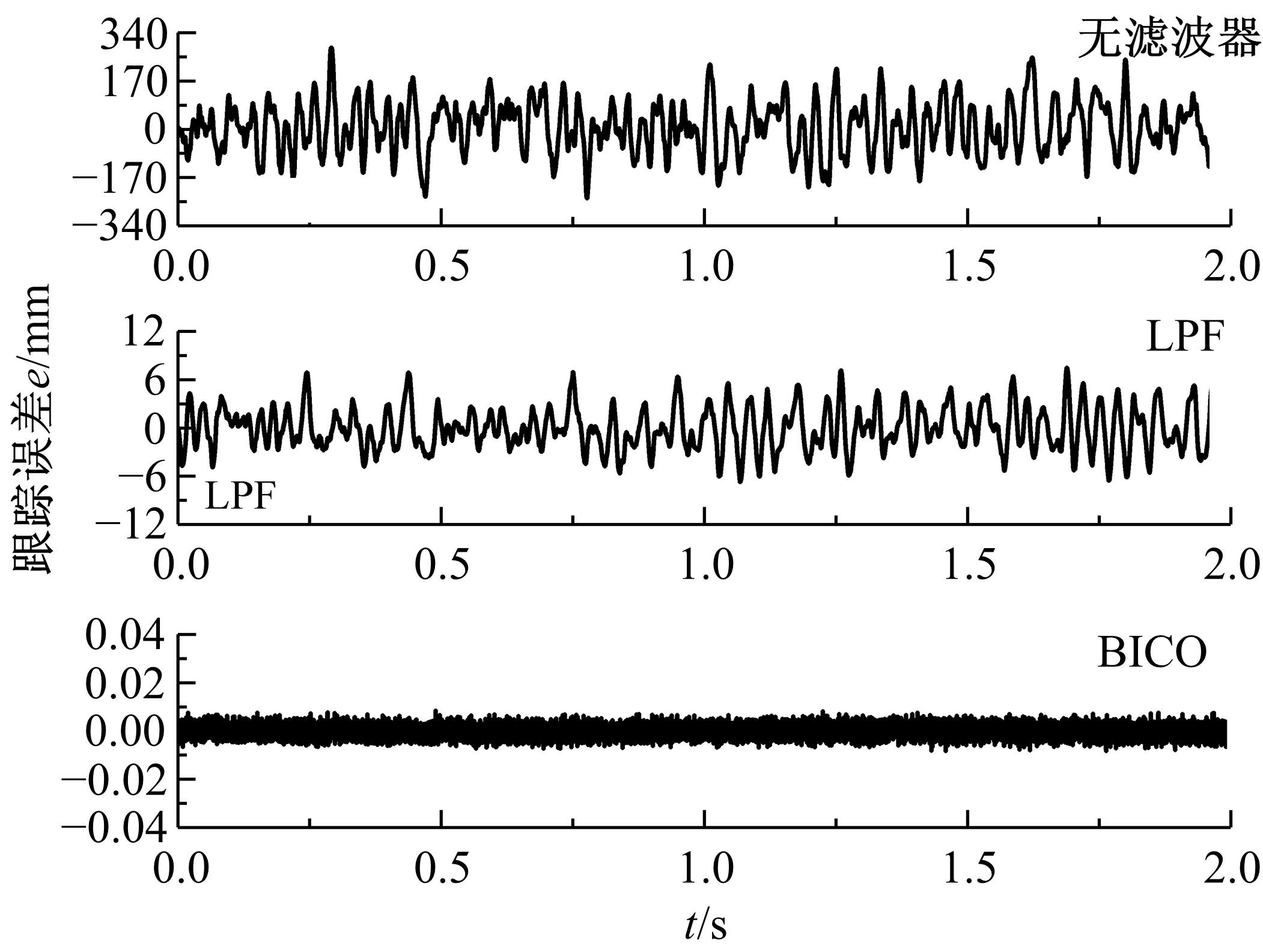
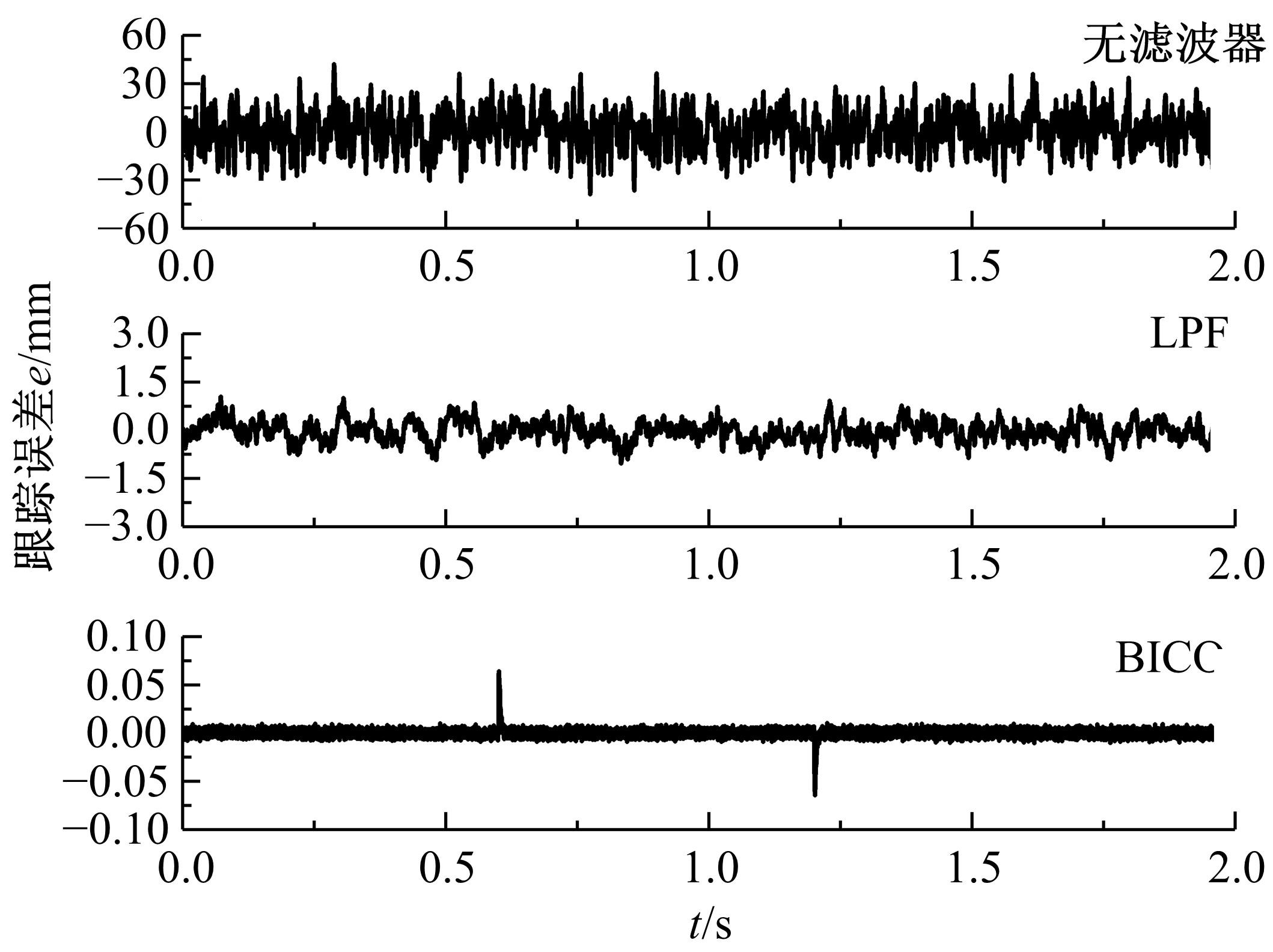
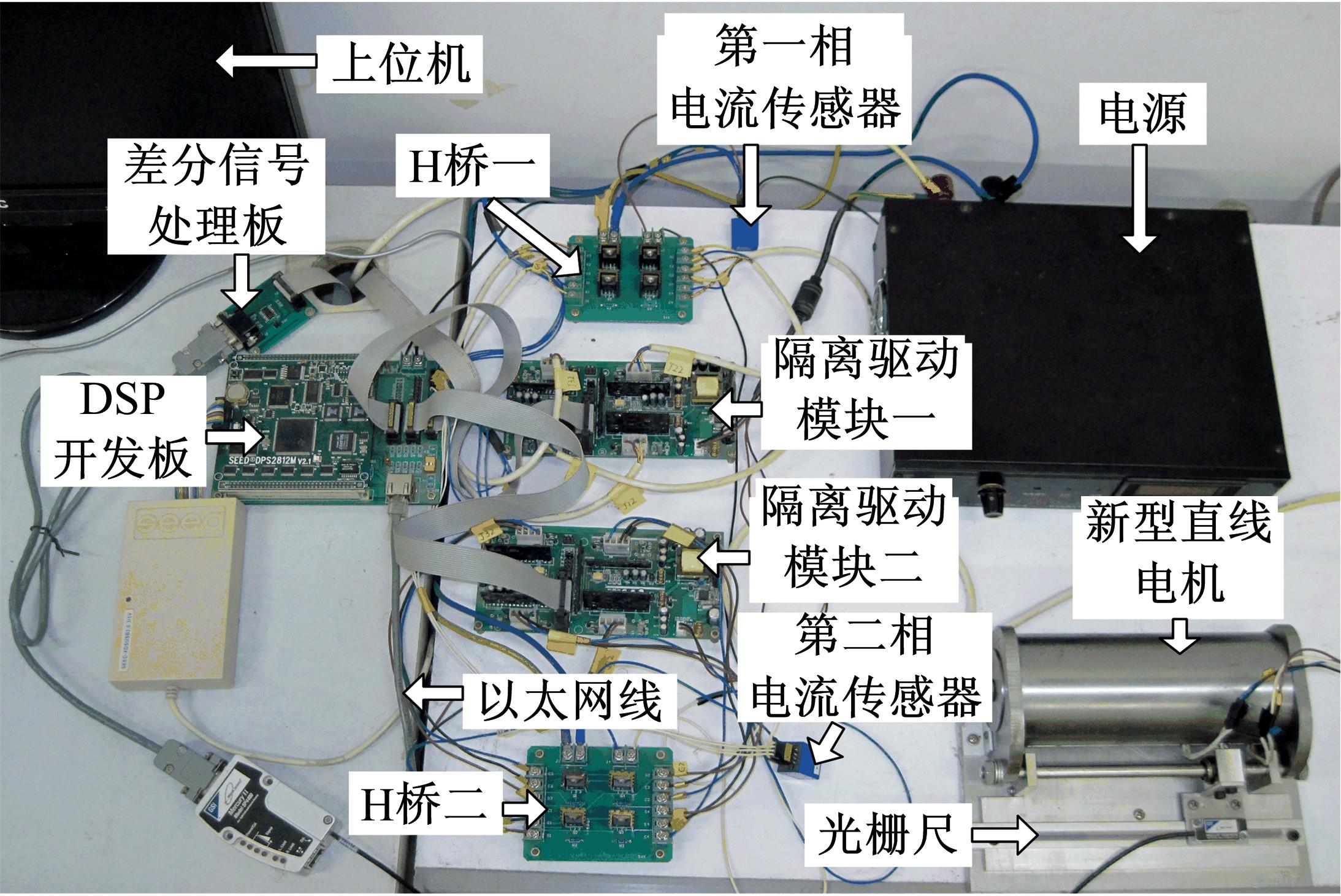
为解决反馈信号测量噪声影响运动控制性能的问题,提出了基于分数阶BICO滤波器的运动控制系统测量噪声抑制方法。分析了分数阶BICO滤波器的性能特点,并基于扩张状态观测器构建了直线电机轨迹跟踪运动控制系统。与常规的低通滤波器以及不加滤波器控制方案进行对比,分别研究了系统未加负载、系统参数变化以及存在外部干扰时的轨迹跟踪误差。对比仿真和实验结果表明:分数阶BICO滤波器能有效抑制测量噪声的影响,进一步提高运动控制精度。
中图分类号:
- TP273



| 1 | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| Xiong Lu, Yang Xing, Zhuo Gui-rong, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| 2 | 祁若龙, 张伟, 王铁军, 等. 仿人头颈部机器人跟踪运动控制[J]. 吉林大学学报: 工学版, 2016, 46(5): 1595-1601. |
| Qi Ruo-long, Zhang Wei, Wang Tie-jun, et al. Tracking motion control method of humanoid head and neck robot[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(5): 1595-1601. | |
| 3 | Chen S Y, Chiang H H, Liu T S,et al. Precision motion control of permanent magnet linear synchronous motors using adaptive fuzzy fractional-order sliding-mode control[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(2): 741-752. |
| 4 | 钱立军, 胡伟龙, 辛付龙, 等. 基于H∞的车辆横向运动鲁棒控制[J]. 吉林大学学报: 工学版, 2015, 45(6): 1757-1762. |
| Qian Li-jun, Hu Wei-long, Xin Fu-long, et al. Controlling of vehicle lateral movement based on robust H∞ theory[J]. Journal of Jilin University(Engineering and Technology Edition), 2015, 45(6): 1757-1762. | |
| 5 | 张超, 孙启鸣, 姜红. 一种具有噪声干扰的MIMO非线性时变系统自适应控制[J]. 控制与决策, 2020, 35(5): 1113-1122. |
| Zhang Chao, Sun Qi-ming, Jiang Hong. An adaptive control for MIMO non-linear time-varying systems with noise disturbances[J]. Control and Decision, 2020, 35(5): 1113-1122. | |
| 6 | 左月飞, 符慧, 刘闯, 等. 考虑转速滤波的永磁同步电动机转速伺服系统改进型自抗扰控制器[J]. 电工技术学报, 2016, 31(9): 137-145. |
| Zuo Yue-fei, Fu Hui, Liu Chuang, et al. A modified active disturbance rejection controller concerning speed filter for PMSM speed servo system[J]. Transactions of China Electrotechnical Society, 2016, 31(9): 137-145. | |
| 7 | Kim B K, Chung W K. Advanced disturbance observer design for mechanical positioning systems[J]. IEEE Transactions on Industrial Electronics, 2003, 50(6): 1207-1216. |
| 8 | 于欣波, 贺威, 薛程谦, 等. 基于扰动观测器的机器人自适应神经网络跟踪控制研究[J]. 自动化学报, 2019, 45(7): 1307-1324. |
| Yu Xin-bo, He Wei, Xue Cheng-qian, et al. Disturbance observer-based adaptive neural network tracking control for robots[J]. Acta Automatica Sinica, 2019, 45(7): 1307-1324. | |
| 9 | Chen Y Q, Vinagre B M, Podlubny I. Fractional order disturbance observer for robust vibration suppression[J]. Nonlinear Dynamics, 2004, 38(4): 355-367. |
| 10 | Luo Y, Zhang T, Lee B, et al. Disturbance observer design with Bode's ideal cut-off filter in hard-disc-drive servo system[J]. Mechatronics, 2013, 23(7): 856-862. |
| 11 | Olivier L E, Craig I K, Chen Y Q. Fractional order and BICO disturbance observers for a run-of-mine ore milling circuit[J]. Journal of Process Control, 2012, 22(1): 3-10. |
| 12 | Bode H W. Network Analysis and Feedback Amplifier Design[M]. New York: Van Nostrand, 1945. |
| 13 | Han J. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. |
| [1] | 李学勇,赵仲秋,张春松,路长厚. 基于有限元的人体⁃机械手交互力计算方法[J]. 吉林大学学报(工学版), 2021, 51(5): 1612-1619. |
| [2] | 于萍,穆特,朱黎辉,周子业,宋杰. 钻具输送装置非线性动力学分析及稳定性控制[J]. 吉林大学学报(工学版), 2021, 51(3): 820-830. |
| [3] | 姜继海,赵存然,张冠隆,车明阳. 航空煤油柱塞泵摩擦副涂层材料摩擦性能[J]. 吉林大学学报(工学版), 2021, 51(1): 147-153. |
| [4] | 胡明伟,王洪光,潘新安. 基于正交设计的协作机器人全域结构优化设计[J]. 吉林大学学报(工学版), 2021, 51(1): 370-378. |
| [5] | 李满天, 蒋振宇, 王鹏飞, 孙立宁. 基于多虚拟元件的直腿四足机器人Trot步态控制[J]. 吉林大学学报(工学版), 2015, 45(5): 1502-1511. |
| [6] | 黄家才, 施昕昕, 李宏胜, 徐庆宏, 石要武. 永磁同步电机调速系统的分数阶积分滑模控制[J]. 吉林大学学报(工学版), 2014, 44(6): 1736-1742. |
| [7] | 刘昌盛, 何清华, 张大庆, 李铁辉, 龚俊, 赵喻明. 混合动力挖掘机势能回收系统参数优化与试验[J]. 吉林大学学报(工学版), 2014, 44(2): 379-386. |
| [8] | 龚俊, 何清华, 张大庆, 张云龙, 刘昌盛, 唐中勇. 混合动力叉车节能效果评价及能量回收系统试验[J]. 吉林大学学报(工学版), 2014, 44(01): 29-34. |
| [9] | 周晓勤, 朱志伟, 罗丹, 赵绍昕, 赵晓东. 线性改变切削深度对单晶铜纳米切削的影响[J]. 吉林大学学报(工学版), 2012, 42(01): 109-115. |
| [10] | 邓宗全,侯绪研,高海波,胡明 . 基于协调运动控制的摇臂式探测车路径多属性决策[J]. 吉林大学学报(工学版), 2008, 38(04): 930-935. |
|
||