吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (5): 1612-1619.doi: 10.13229/j.cnki.jdxbgxb20200501
• 车辆工程·机械工程 • 上一篇
基于有限元的人体⁃机械手交互力计算方法
李学勇1,2,3( ),赵仲秋1,2,张春松1,2,路长厚1,2,3
),赵仲秋1,2,张春松1,2,路长厚1,2,3
- 1.山东大学 机械工程学院,济南 250061
2.山东大学 高效洁净机械制造教育部重点实验室,济南 250061
3.山东大学 机械工程国家级实验教学示范中心,济南 250061
Finite element based calculation method of human⁃robot interaction force
Xue-yong LI1,2,3(),Zhong-qiu ZHAO1,2,Chun-song ZHANG1,2,Chang-hou LU1,2,3
- 1.School of Mechanical Engineering,Shandong University,Jinan 250061,China
2.Key Laboratory of High Efficiency and Clean Mechanical Manufacture,Ministry of Education,Shandong University,Jinan 250061,China
3.National Demonstration Center for Experimental Mechanical Engineering Education,Shandong University,Jinan 250061,China
摘要:
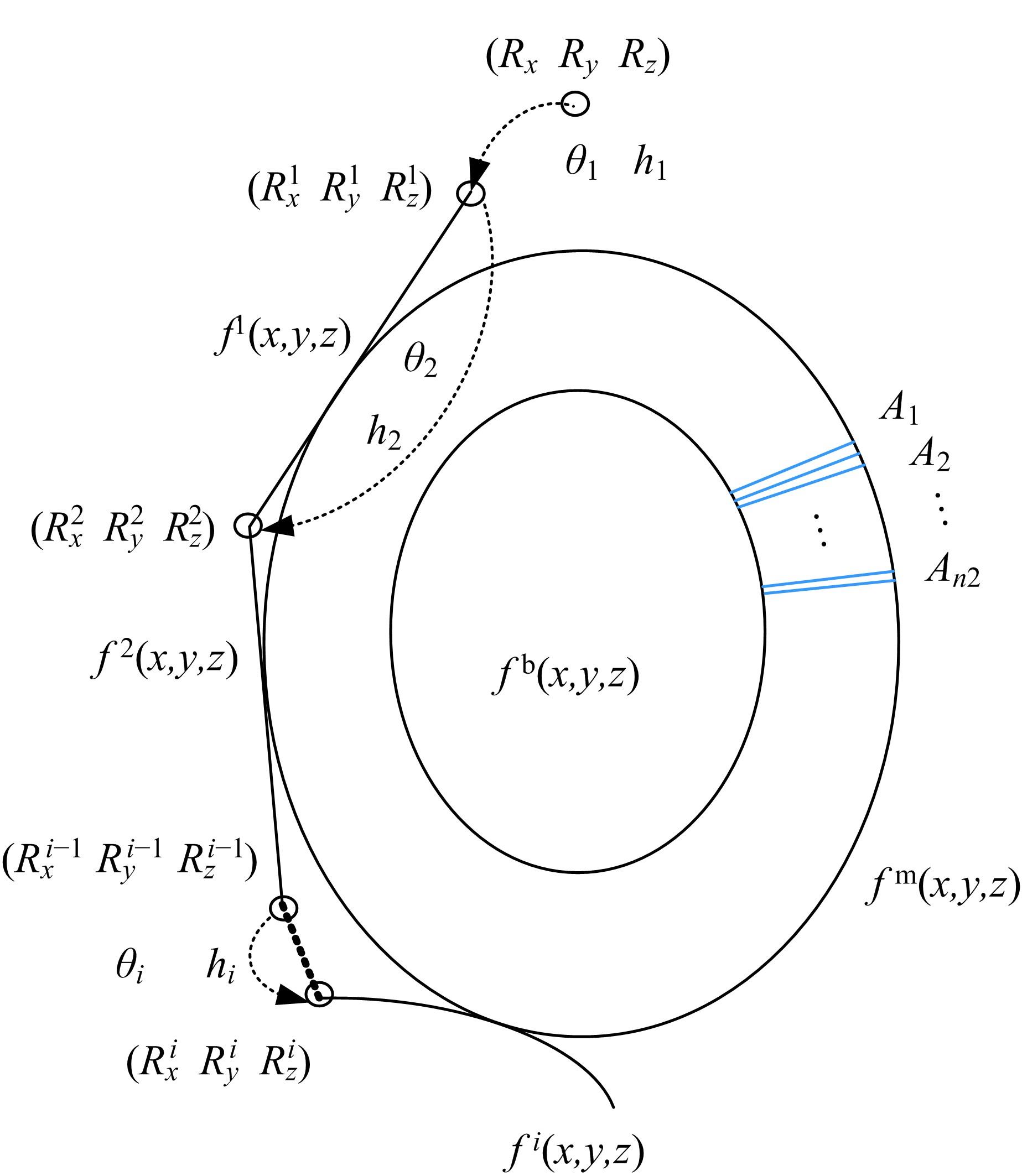
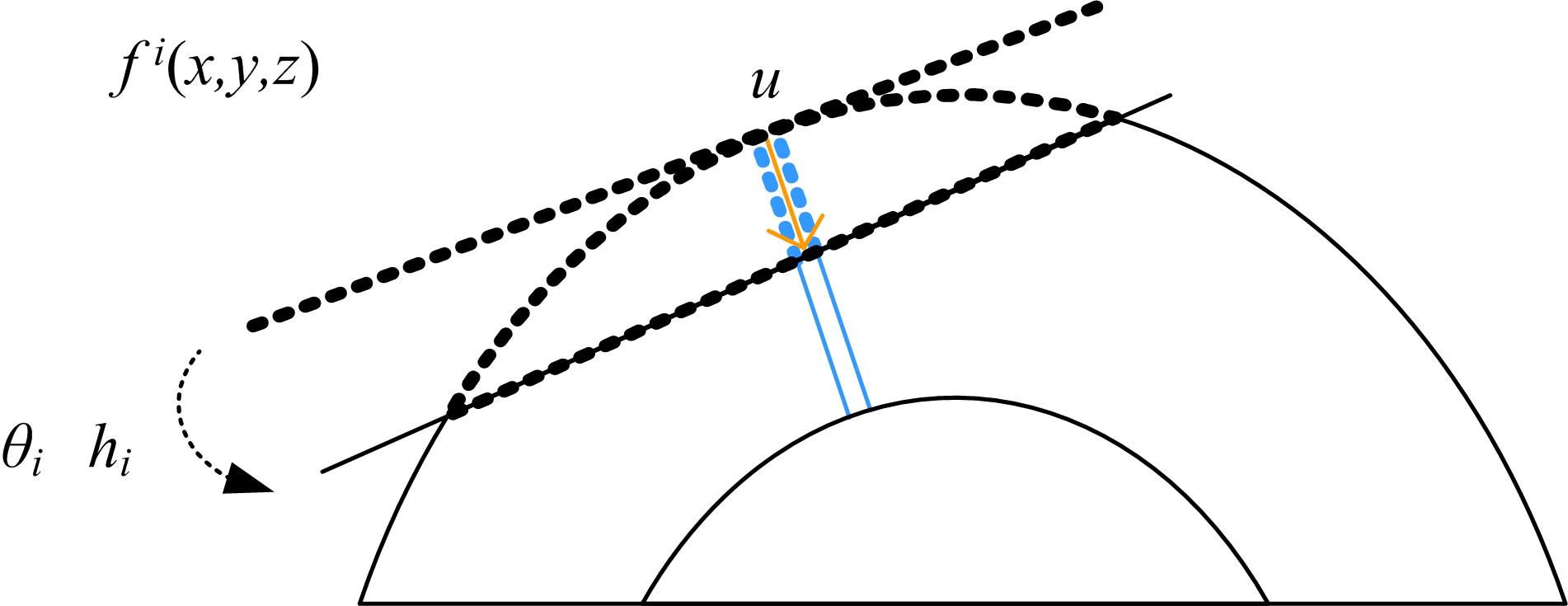
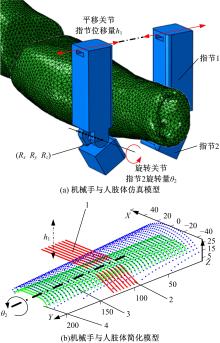
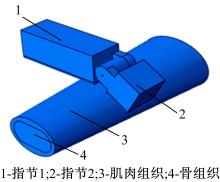
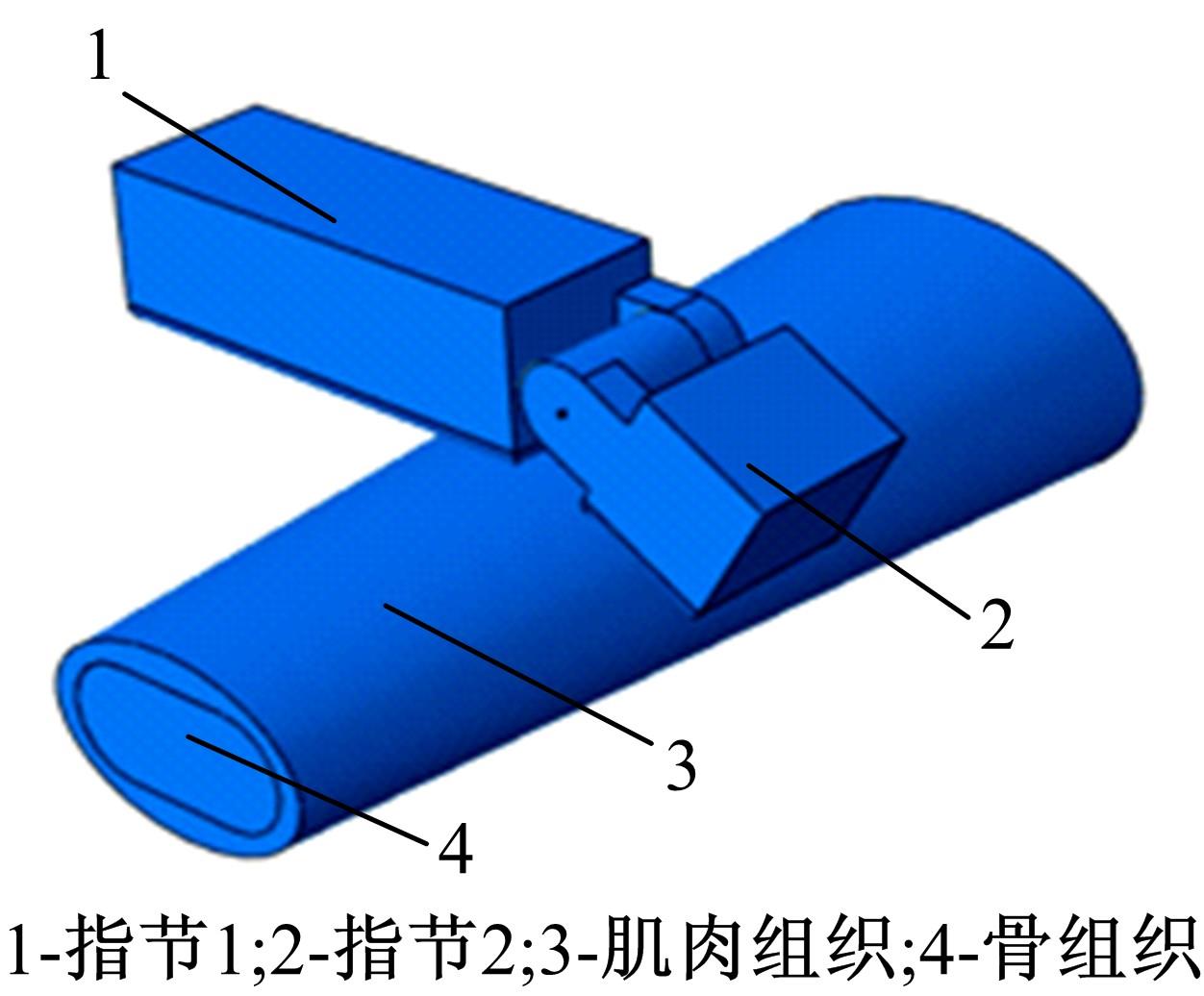
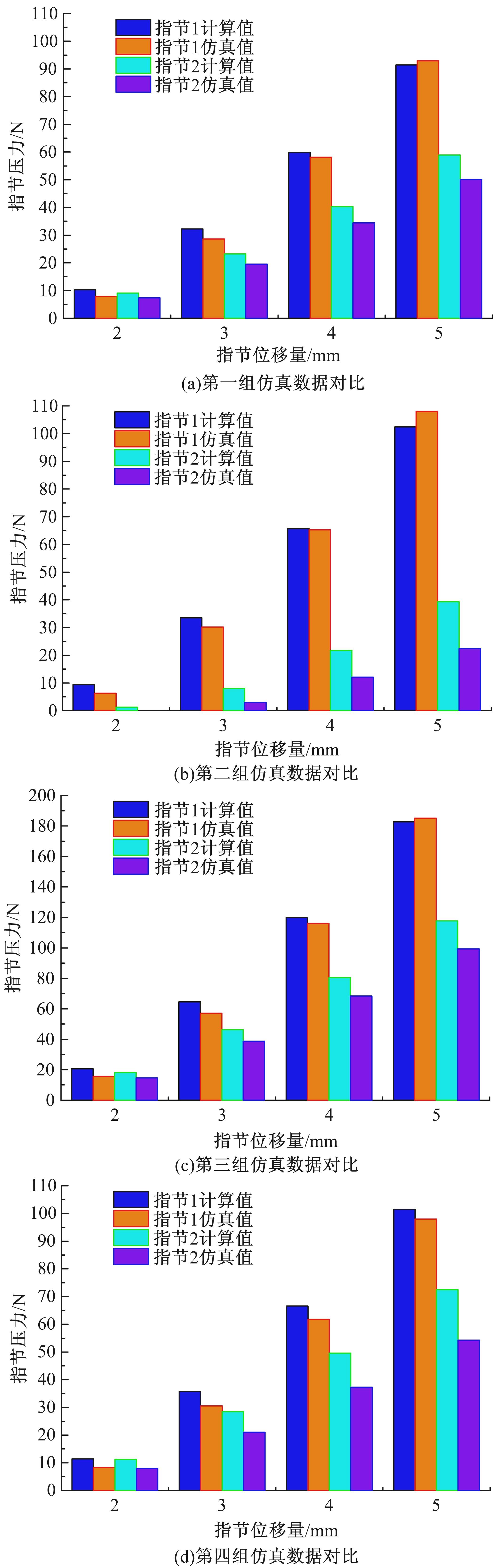
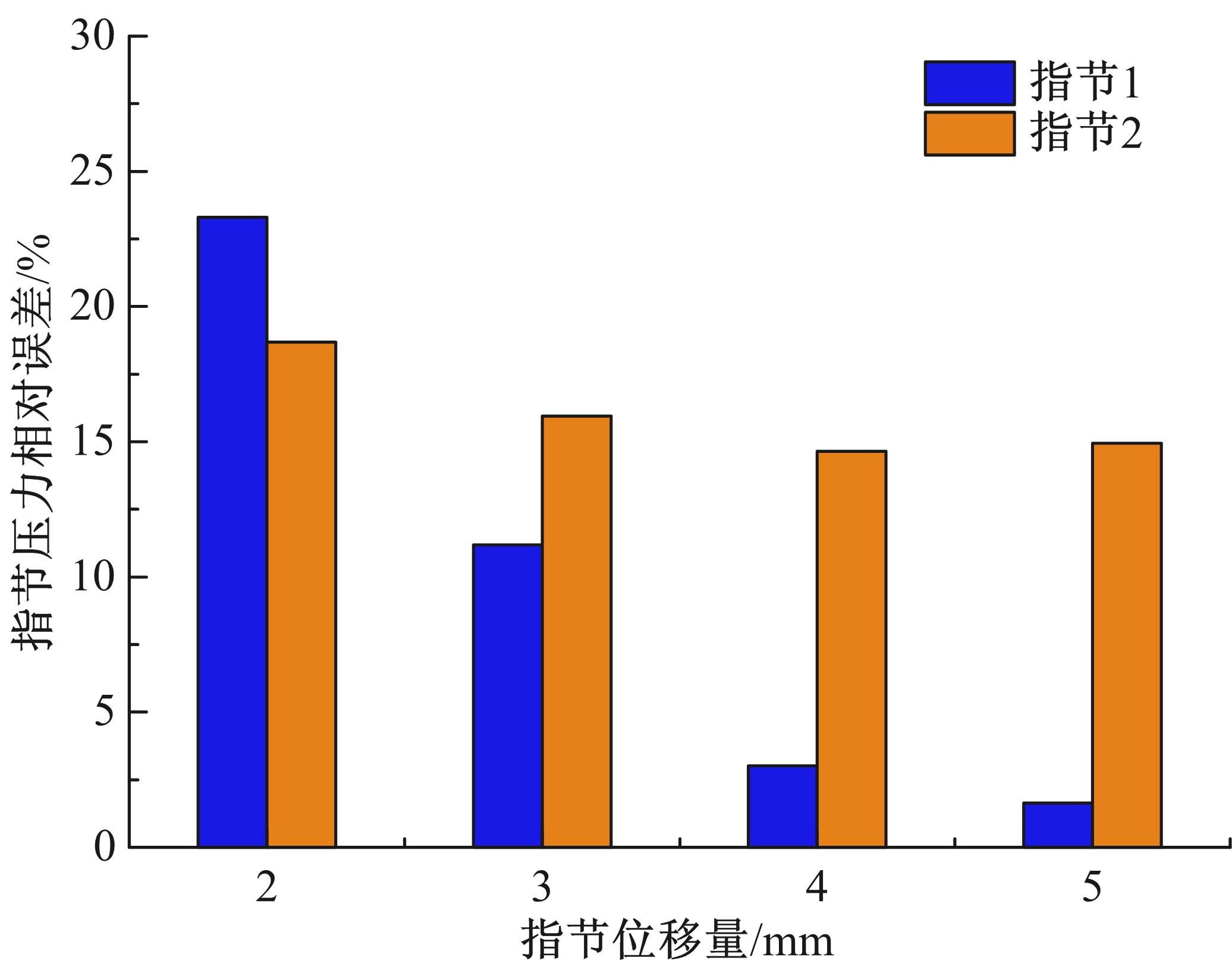
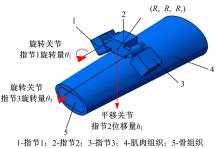
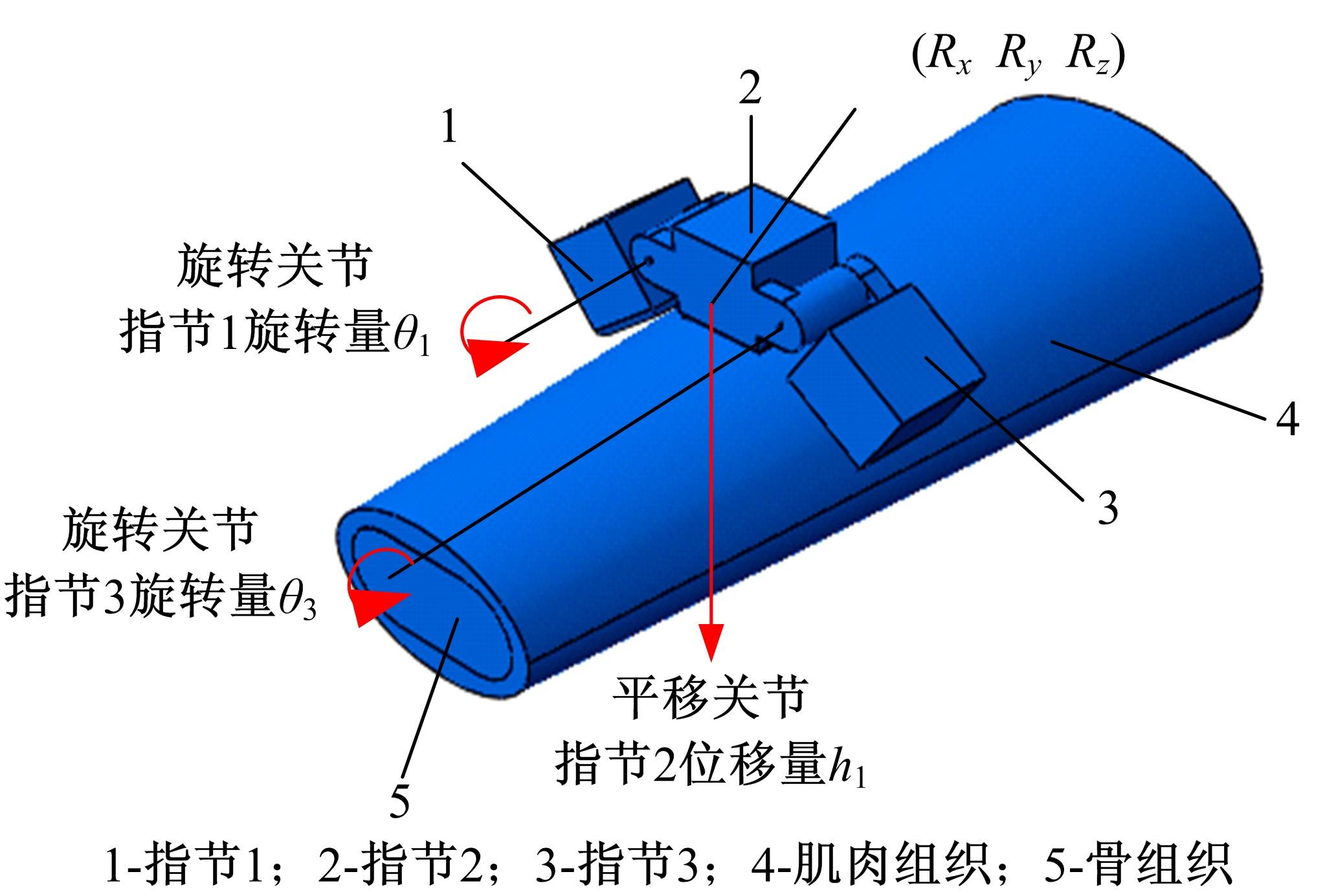
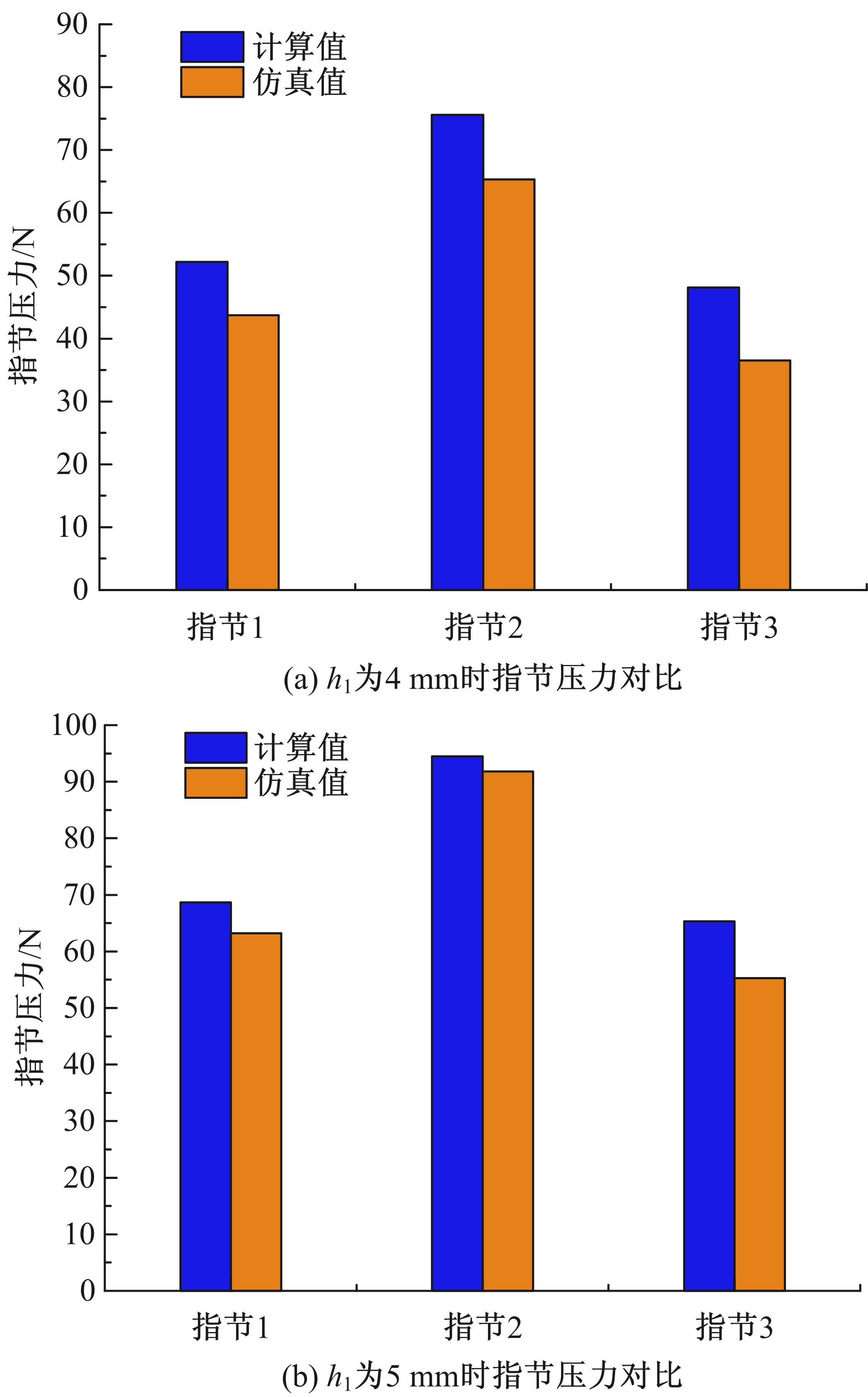
通过建立人肢体骨骼、肌肉组织与康复机器人机械手指节表面的曲面方程,对人肢体肌肉组织划分微元,通过微元的应变逐步求解康复机器人机械手的指节压力,从而实现对人机交互力的计算与分析。在简化模型仿真验证中,展现了位移量(压入量)、交互位置、人肢体软组织弹性模量、泊松比等参数对人机交互力的影响规律,位移量为5 mm时,理论计算与仿真结果的平均相对误差在10%~15%左右。仿真结果表明:本文理论可以有效计算康复机器人机械手的指节压力,能对人机交互力进行计算与评价。
中图分类号:
- TP242.3





| 1 | Hu J, Hou Z G, Chen Y X, et al. Lower limb rehabilitation robots and interactive control methods[J]. Acta Automatica Sinica, 2014, 40(11): 2377-2390. |
| 2 | Basteris A, Nijenhuis S M, Stienen A H A, et al. Training modalities in robot-mediated upper limb rehabilitation in stroke: a framework for classification based on a systematic review[J]. Journal of Neuroengineering and Rehabilitation, 2014, 11(1): 1-15. |
| 3 | 曹恩国, 刘坤, 吉硕, 等. 减重站起康复训练系统机械结构设计与优化[J]. 吉林大学学报: 工学版, 2019, 49(5): 1558-1566. |
| Cao En-guo, Liu Kun, Ji Shuo, et al. Mechanical structure design and optimization of weight-support STS rehabilitation training system[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1558-1566. | |
| 4 | 刘坤, 赵建琛, 曹恩国, 等. 基于下肢动力学检测分析的站起康复训练机器人控制[J]. 吉林大学学报: 工学版, 2015, 45(3): 837-844. |
| Liu Kun, Zhao Jian-chen, Cao En-guo, et al. Control methods for standing-up rehabilitation robot based on estimation and analysis of lower limb kinetics[J]. Journal of Jilin University(Engineering and Technology Edition), 2015, 45(3): 837-844. | |
| 5 | Today Robotics. Life science robotics[EB/OL].[2020-05-14]. |
| 6 | Zhao Z, Li X, Lu C, et al. Compliant manipulation method for a nursing robot based on physical structure of human limb[J]. Journal of Intelligent & Robotic Systems, 2020, 100: 973-986. |
| 7 | Gan H, Li X, Lu C, et al. Biomechanical study of human limbs under a robot hand manipulation using finite element analysis[C]∥IEEE International Conference on Mechatronics and Automation, Changchun,China, 2018: 1856-1860. |
| 8 | 于建均, 安硕, 阮晓钢, 等. 基于仿人机械手的五指力封闭抓取算法[J]. 计算机测量与控制, 2019, 27(5): 192-198. |
| Yu Jian-jun, An Shuo, Ruan Xiao-gang, et al. Five-finger closed grasp algorithm based on humanoid manipulator[J]. Computer Measurement and Control, 2019, 27(5): 192-198. | |
| 9 | 邹俞, 晁建刚, 林万洪. 基于力封闭的虚拟手稳定抓持力生成方法[J]. 计算力学学报, 2019, 36(4): 548-554. |
| Zou Yu, Chao Jian-gang, Lin Wan-hong. Force closure based virtual hand stable grip generation method[J]. Chinese Journal of Computational Mechanics, 2019, 36(4): 548-554. | |
| 10 | Tian J, Jia Y B. Modeling deformations of general parametric shells grasped by a robot hand[J]. IEEE Transactions on Robotics, 2009, 26(5): 1297-1302. |
| 11 | Zaidi L, Corrales J A, Bouzgarrou B C, et al. Model-based strategy for grasping deformable objects using a multi-fingered robotic hand[J]. Robotics and Autonomous Systems, 2017, 95: 196-206. |
| 12 | Kim D, Maeda Y, Komiyama S.Caging-based grasping of deformable objects for geometry-based robotic manipulation[J].Robomech Journal, 2019, 6(3):1-13. |
| [1] | 于萍,穆特,朱黎辉,周子业,宋杰. 钻具输送装置非线性动力学分析及稳定性控制[J]. 吉林大学学报(工学版), 2021, 51(3): 820-830. |
| [2] | 王金国,黄恺,闫瑞芳,任帅,王志强,郭劲. 元胞自动机-有限元法模拟碳当量元素对亚共晶球墨铸铁流动性的影响[J]. 吉林大学学报(工学版), 2021, 51(3): 855-865. |
| [3] | 王波,何洋扬,聂冰冰,许述财,张金换. 底部爆炸条件下车内乘员的腹部损伤[J]. 吉林大学学报(工学版), 2021, 51(3): 792-798. |
| [4] | 张刘,郑潇逸,张帆,赵宇,赵书阳. 大容差多柔性透镜组结构优化设计[J]. 吉林大学学报(工学版), 2021, 51(2): 478-485. |
| [5] | 姜继海,赵存然,张冠隆,车明阳. 航空煤油柱塞泵摩擦副涂层材料摩擦性能[J]. 吉林大学学报(工学版), 2021, 51(1): 147-153. |
| [6] | 杨帆,张旭东,赵蒙,折波,邓俊楷. 基于有限元计算的形状记忆合金⁃金属玻璃复合材料变形行为[J]. 吉林大学学报(工学版), 2021, 51(1): 172-180. |
| [7] | 胡明伟,王洪光,潘新安. 基于正交设计的协作机器人全域结构优化设计[J]. 吉林大学学报(工学版), 2021, 51(1): 370-378. |
| [8] | 刘纯国,于晓彤,岳韬,李东来,张明哲. 双曲率筋条壁板铣削回弹预测[J]. 吉林大学学报(工学版), 2021, 51(1): 188-199. |
| [9] | 宫亚峰,宋加祥,毕海鹏,谭国金,胡国海,林思远. 装配式箱涵结构缩尺模型静载试验及有限元分析[J]. 吉林大学学报(工学版), 2020, 50(5): 1728-1738. |
| [10] | 李银平,靳添絮,刘立. 纯电动铲运机弓网续能系统设计与动态特性仿真[J]. 吉林大学学报(工学版), 2020, 50(2): 454-463. |
| [11] | 庄蔚敏,施宏达,解东旋,杨冠男. 钢铝异质无铆钉粘铆复合连接胶层厚度分布[J]. 吉林大学学报(工学版), 2020, 50(1): 100-106. |
| [12] | 李欣,孙延朋,王丹,陈军绪,谷诤巍,徐虹. 汽车前地板成形有限元数值模拟[J]. 吉林大学学报(工学版), 2019, 49(5): 1608-1614. |
| [13] | 周晓勤,杨璐,张磊,陈立军. 具有负压缩性的铰接八面体结构的有限元分析[J]. 吉林大学学报(工学版), 2019, 49(3): 865-871. |
| [14] | 毕秋实,王国强,黄婷婷,毛瑞,鲁艳鹏. 基于DEM-FEM耦合的双齿辊破碎机辊齿强度分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1770-1776. |
| [15] | 古海东,罗春红. 疏排桩-土钉墙组合支护基坑土拱效应模型试验[J]. 吉林大学学报(工学版), 2018, 48(6): 1712-1724. |
|
||