吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (2): 719-729.doi: 10.13229/j.cnki.jdxbgxb20181043
• 通信与控制工程 • 上一篇
基于分布式二维激光测距仪的室内行人检测与跟踪
胡钊政1,2( ),李招康1,陶倩文2
),李招康1,陶倩文2
- 1.河北工业大学 电子信息工程学院, 天津 300401
2.武汉理工大学 智能交通系统研究中心, 武汉 430063
Indoor pedestrian detection and tracking from distributed two⁃dimensional laser range finders
Zhao-zheng HU1,2(),Zhao-kang LI1,Qian-wen TAO2
- 1.School of Electronic and Information Engineering, Hebei University of Technology, Tianjin 300401, China
2.Intelligent Transportation System Research Center, Wuhan University of Technology, Wuhan 430063, China
摘要:
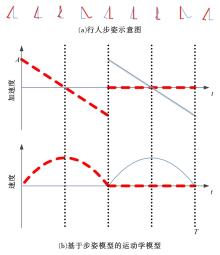
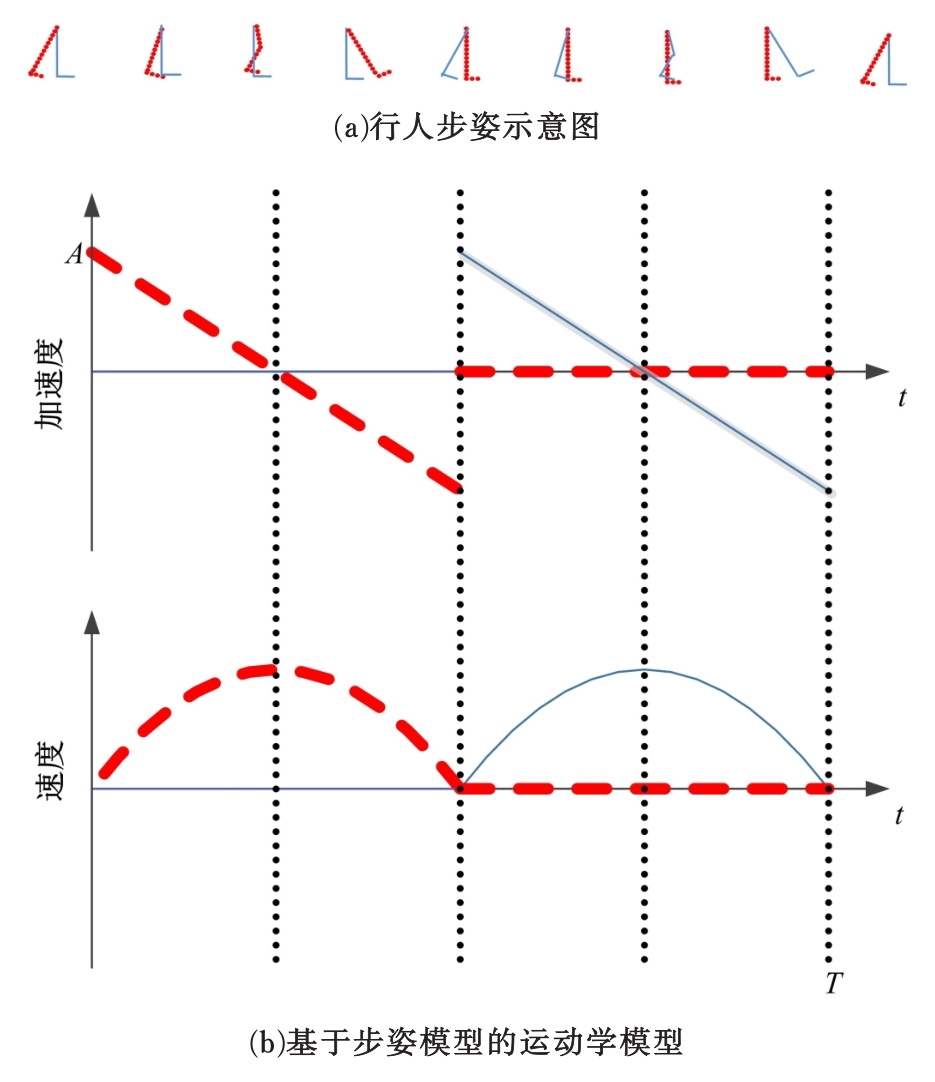
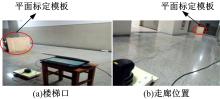
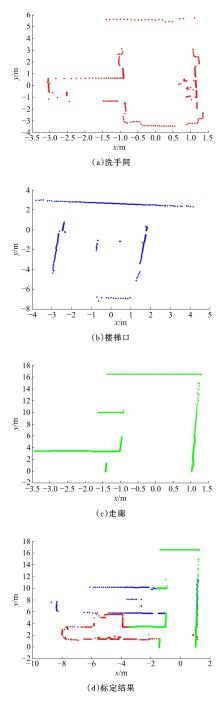
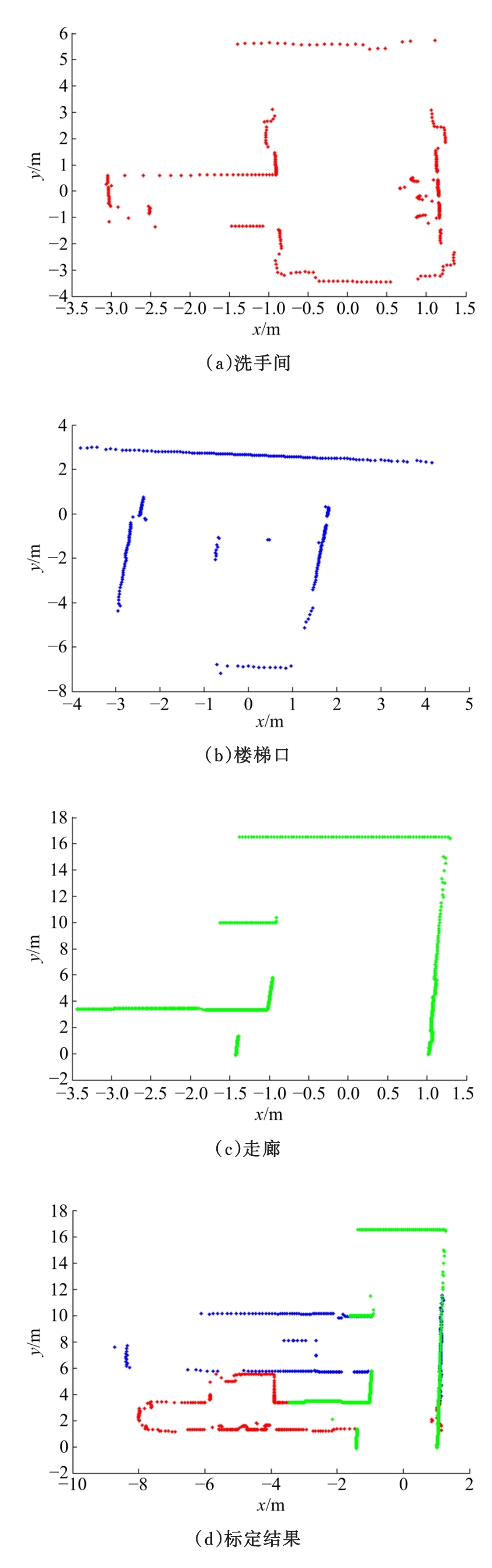
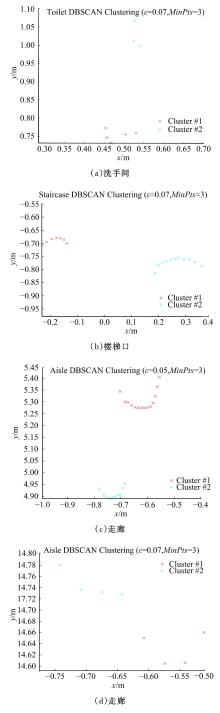
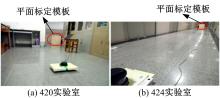
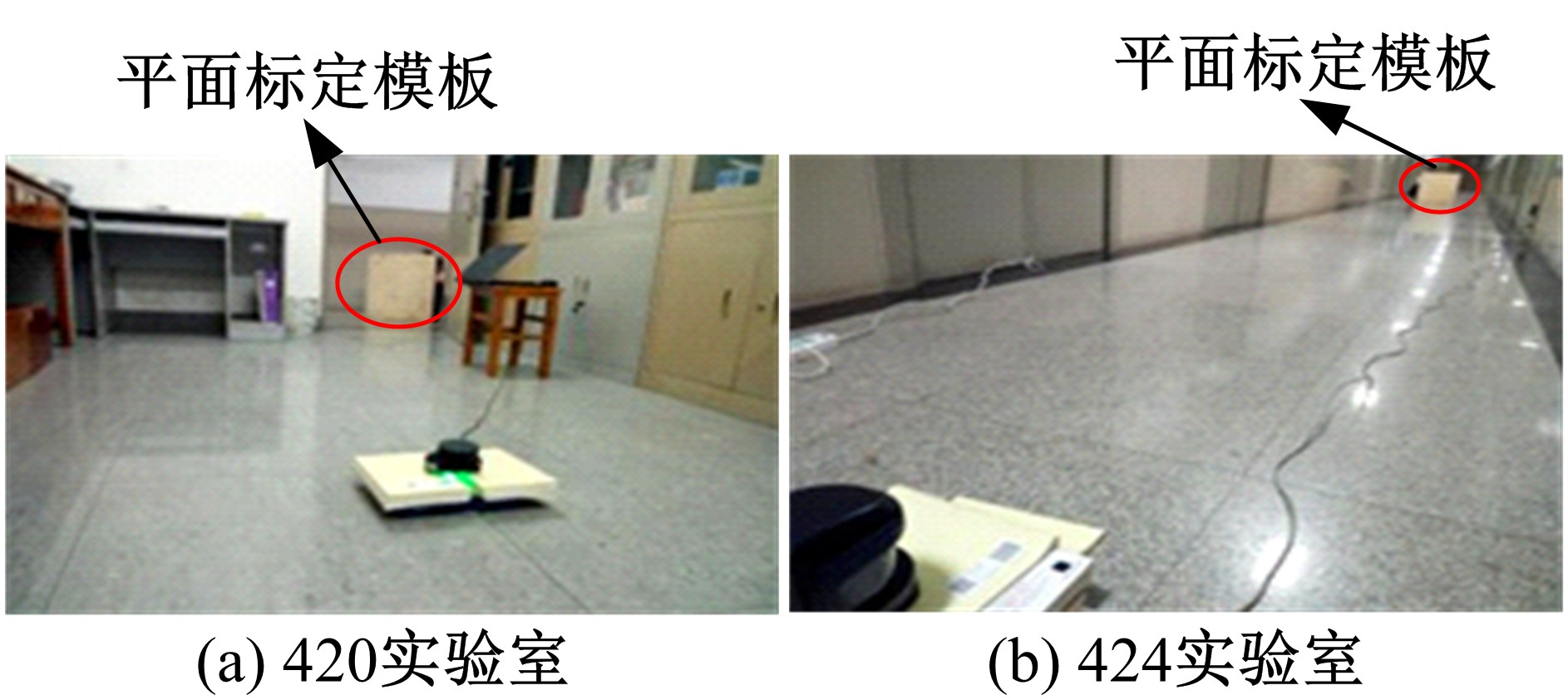
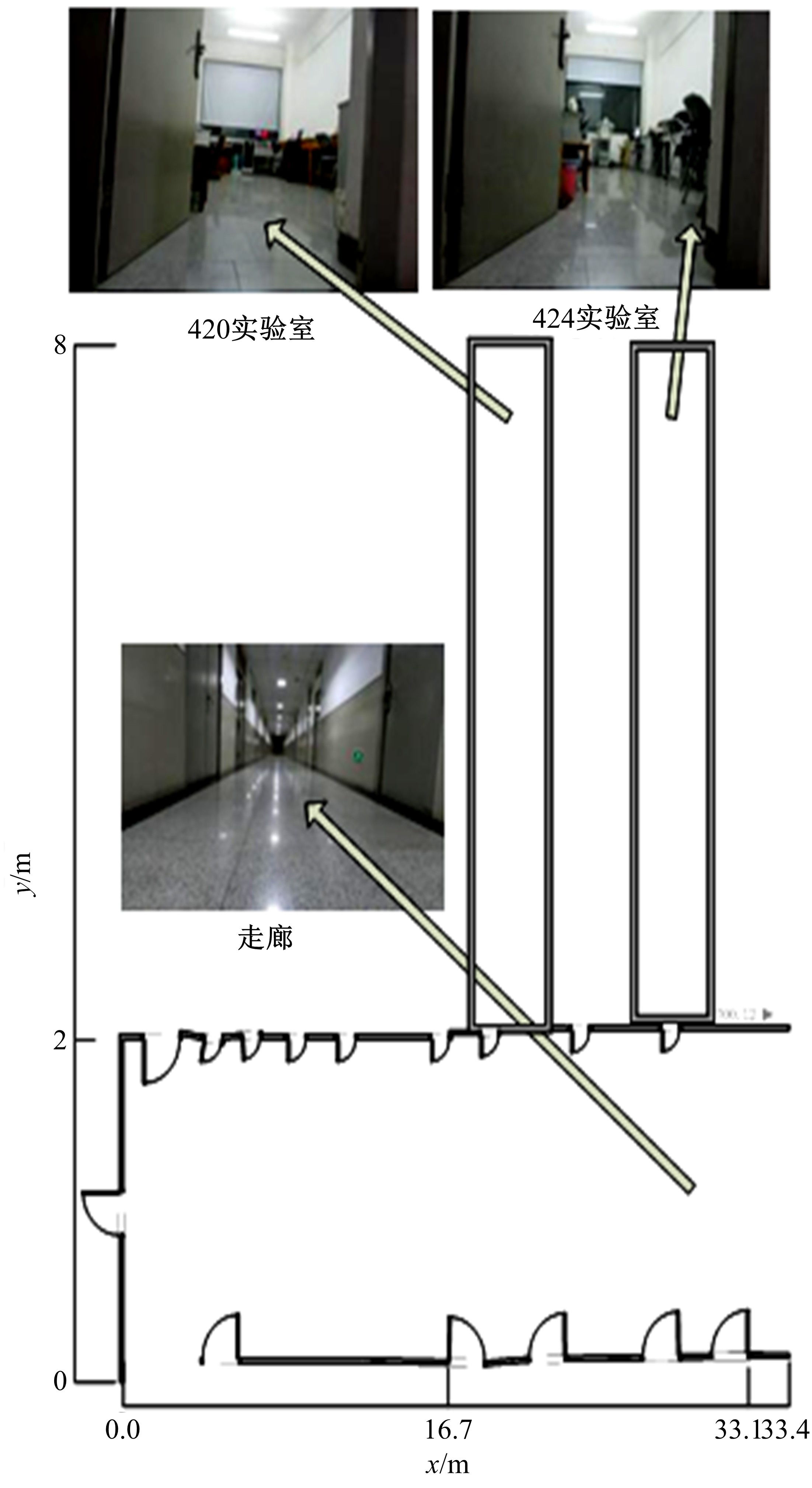
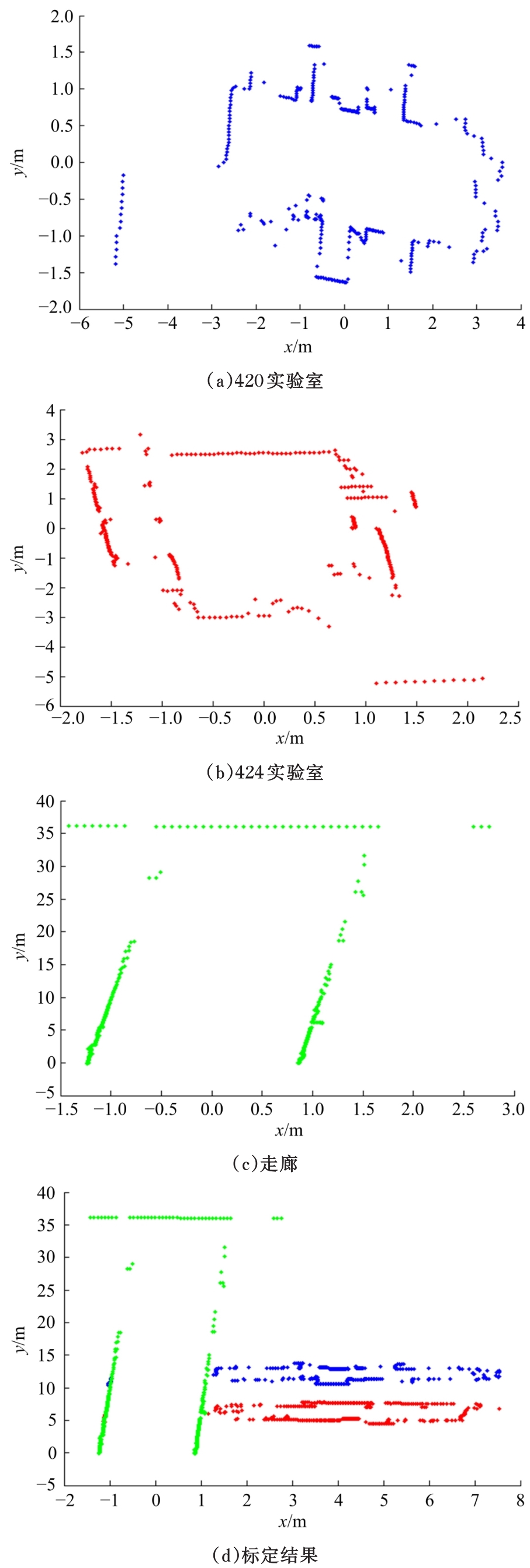
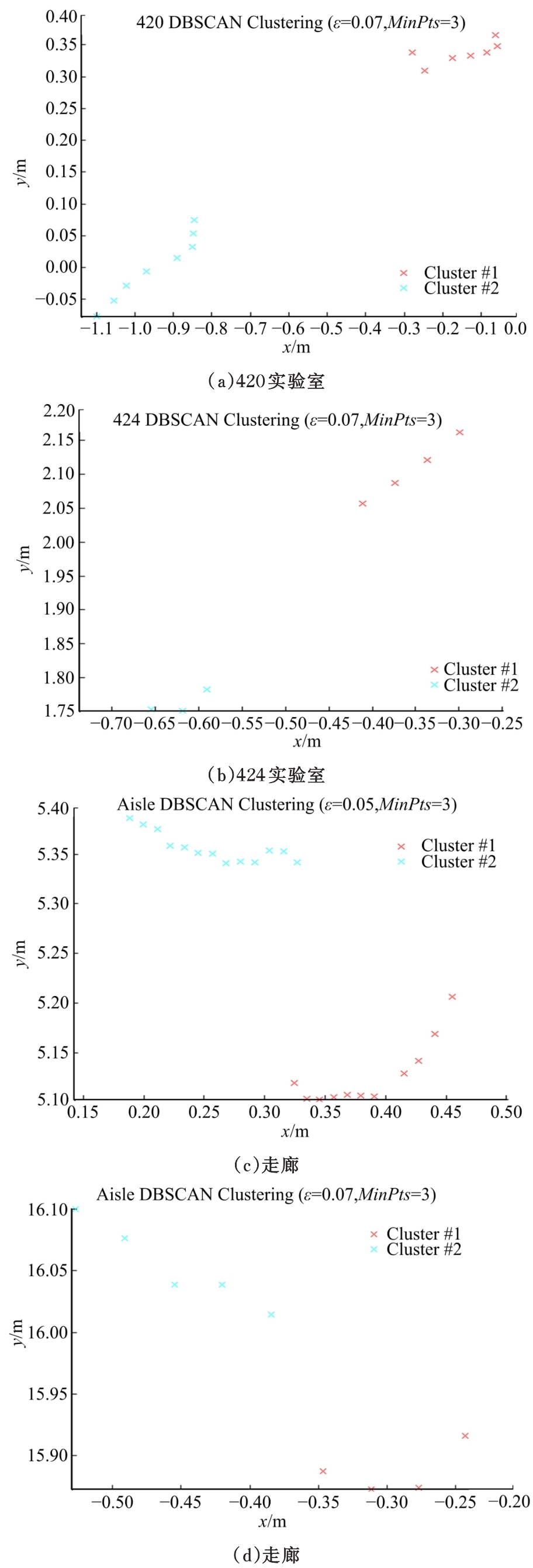
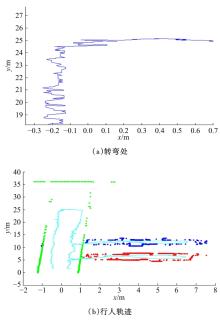
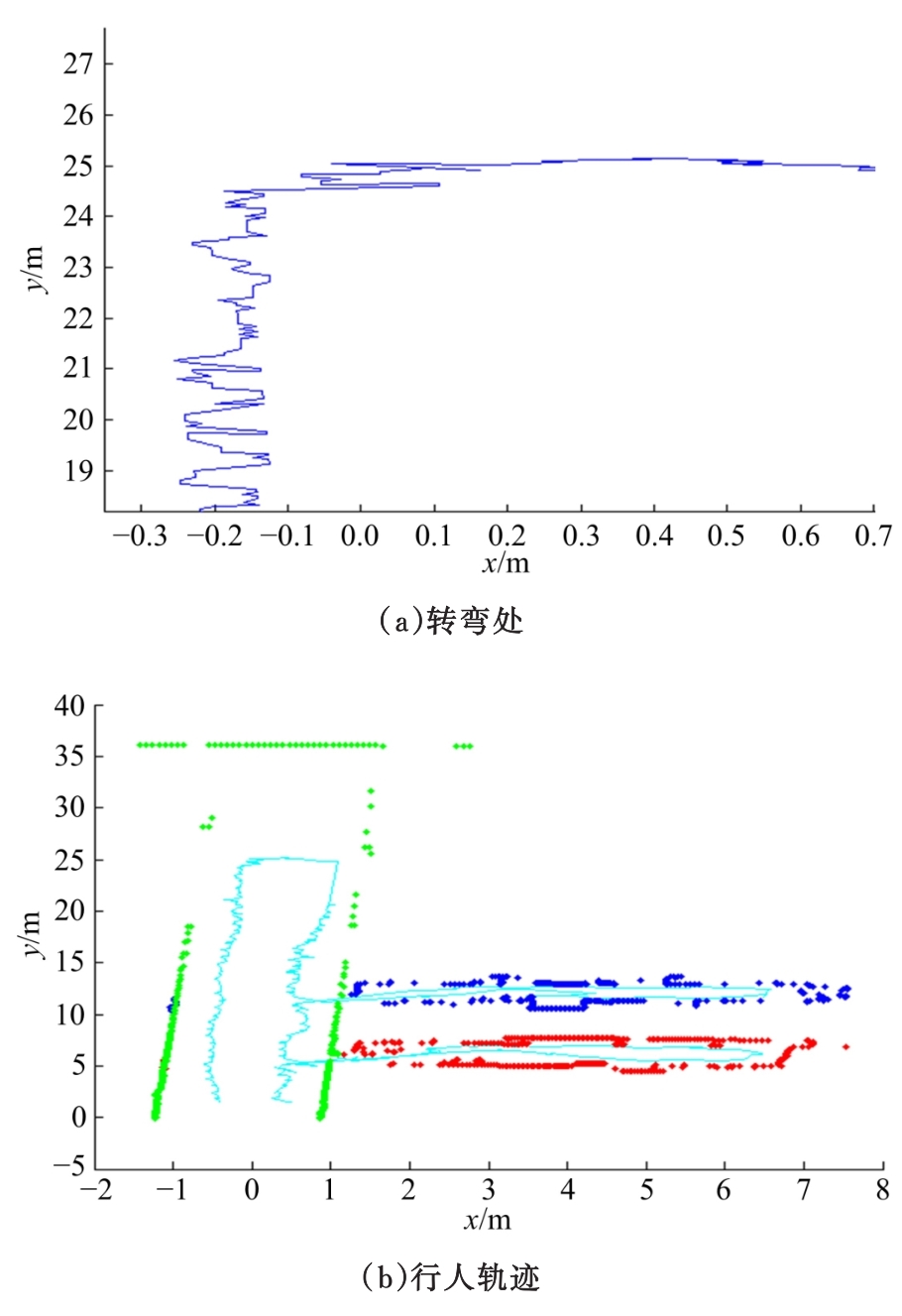
针对多台二维激光测距仪的空间标定问题进行研究,提出了基于虚拟二面体的激光测距仪标定新方法,并将不同激光测距仪采集的激光数据映射至同一参考坐标系中。在此基础上,提出了激光高斯背景模型(LGM)对激光数据进行背景建模,检测出运动目标,然后通过DBSCAN算法对同一类的点云目标进行聚类分析。最后,通过行人运动模型并结合卡尔曼滤波算法实现行人在不同激光视场下的准确跟踪。在实验中,利用真实的室内场景对本文算法进行验证,并就视场角和不同光照条件下的识别率与现有算法进行对比。实验利用不同类型的二维激光测距仪对场景中的行人目标进行检测与跟踪。实验结果表明:利用多台分布式激光测距仪可在不受光照条件的影响下实现大视角的室内场景监控,利用本文算法能够从多台激光融合的点云数据中较精确且稳定地检测并跟踪行人目标。
中图分类号:
- TP277















| 1 | Uenoyama N, Niitsuma M. Temporal segmentation of environmental map based on changing rate of activity areas and improvement of tracking method using LRF[C]∥IEEE/SICE International Symposium on System Integration. Nagoya, Japan: IEEE, 2016: 57-62. |
| 2 | Seow Y, Miyagusuku R, Yamashita A, et al. Detecting and solving the kidnapped robot problem using laser range finder and wifi signal[C]∥IEEE International Conference on Real-time Computing & Robotics, Okinawa, Japan, 2018: 18-22. |
| 3 | 张晓冬, 李建桥, 王洋, 等. 基于激光测距仪的地面不平度的测量与分析[J]. 吉林大学学报: 工学版, 2013, 43(5): 1258-1263. |
| Zhang Xiao-dong, Li Jian-qiao, Wang Yang, et al. Measurement and analysis of terrain roughness using distance laser sensor[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(5): 1258-1263. | |
| 4 | 赵静荣, 米阳, 张淑梅, 等. 人眼安全激光测距系统误差分析[J]. 吉林大学学报: 工学版, 2012, 42(增刊1): 410-414. |
| Zhao Jing-rong, Mi Yang, Zhang Shu-mei, et al. Error analysis of eye-safe laser rangefinder[J]. Journal of Jilin University (Engineering and Technology Edition), 2012, 42(Sup.1): 410-414. | |
| 5 | Fernandez-Moral E, Gonzalez-Jimenez J, Arevalo V. Extrinsic calibration of 2D laser rangefinders from perpendicular plane observations[J]. The International Journal of Robotics Research, 2015, 34(11): 1401-1417 |
| 6 | 罗赞丰. 基于多激光的行人目标跟踪[D]. 浙江: 浙江大学信息与电子工程学系, 2012. |
| Luo Zan-feng. Pedestrian tracking based on multiple laser scanners[D]. Zhejiang: School of Information and Electronic Engineering, Zhejiang University, 2012. | |
| 7 | Hu Z Z, Li Y C, Li N, et al. Extrinsic calibration of 2-D laser rangefinder and camera from single shot based on minimal solution[J]. IEEE Transactions on Instrumentation and Measurement, 2016, 65(4): 915-929. |
| 8 | Dylan F G, Takahiro M, Hiroshi I. Automatic position calibration and sensor displacement detection for network of laser range finders for human tracking[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 2010: 2938-2945. |
| 9 | Zhao H, Shibasaki R. A novel system for tracking pedestrians using multiple single-row laser-range scanners[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2005, 35(2): 283-291. |
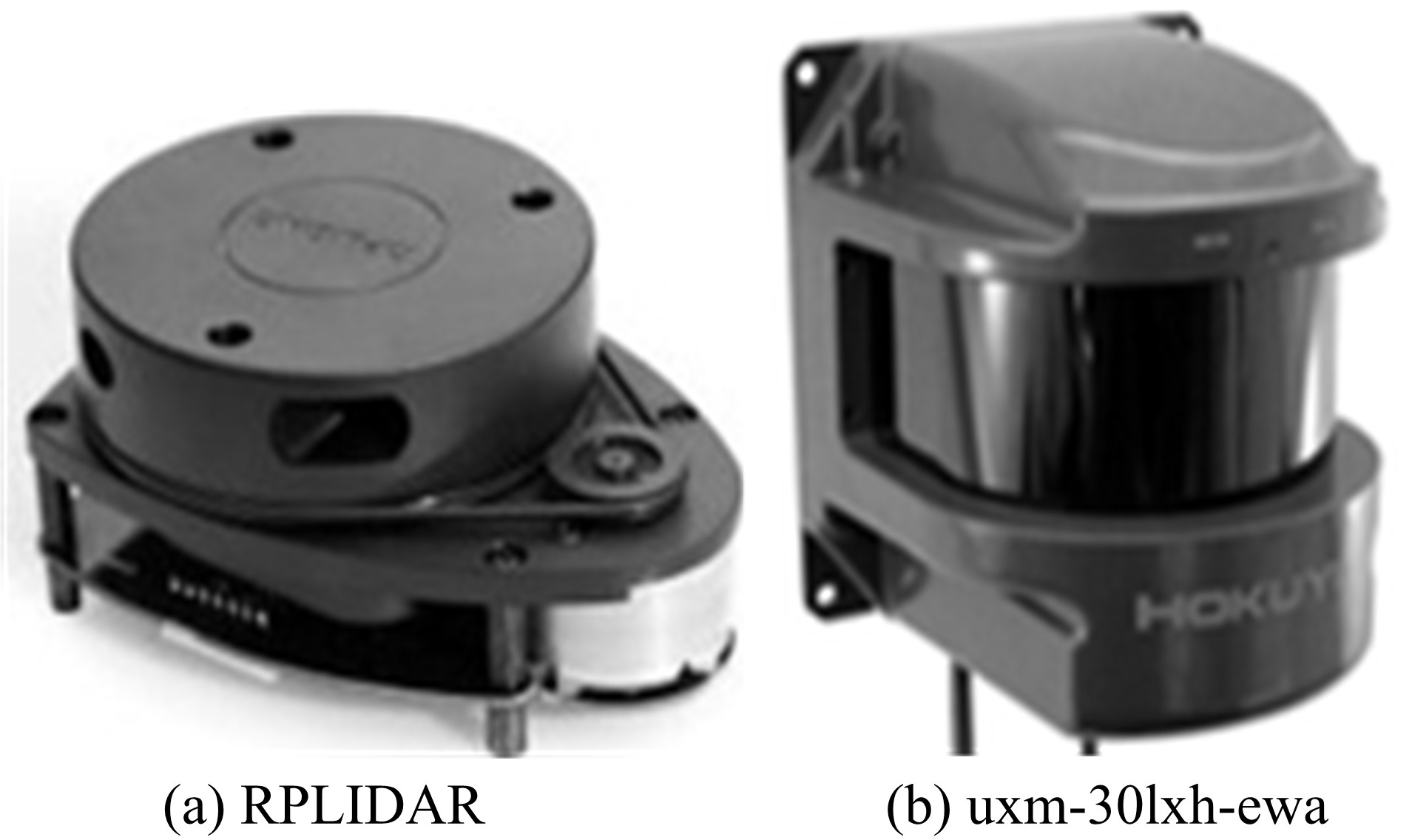
| 10 | 上海思岚科技有限公司. RPLIDAR A1低成本360度激光扫描测距雷达[EB/OL]. [2016-07-04]. |
| 11 | 北洋电机株式会社. Distance Data Output/UXM-30LXH-EWA[EB/OL]. [2018-10-18]. |
| 12 | Ramsey F. Understanding the basic of the kalman filter via a simple and intuitive derivation[J]. IEEE Signal Processing Magazine, 2012, 29(5): 128-132. |
| 13 | Martin E, Hans-Peter K, Joerg S, et al. A density-based algorithm for discovering clusters a density-based algorithm for discovering clusters in large spatial databases with noise[C]∥International Conference on Knowledge Discovery & Data Mining, Portland, Oregon, 1996: 226-231. |
| 14 | Golub G H, Van-Loan C F. Matrix Computation[M]. Maryland: Baltimore, Maryland: John Hopkins University Press, 1996. |
| 15 | Madsen K, Nielsen H B, Tingleff O. Methods for Non-linear Least Squares Problems Informatics and Mathematical Modeling[M]. Lyngby: Technical University of Denmark, DTU, 1999. |
| 16 | He K, Gkioxari G, Dollar P, et al. Mask R-CNN[C]∥2017 IEEE International Conference on Computer Vision(ICCV), Venice, Italy, 2017: 2980-2988. |
| 17 | Dalal N, Triggs B. Histograms of oriented gradients for human detection[C]∥2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, USA, 2005: 886-893. |
| [1] | 赵鹏,蒋宇中,陈斌,李春腾,张杨勇. 基于局部方差域自适应Blanking的超低频信道噪声抑制方法[J]. 吉林大学学报(工学版), 2019, 49(5): 1696-1705. |
| [2] | 李志慧, 胡永利, 赵永华, 马佳磊, 李海涛, 钟涛, 杨少辉. 基于车载的运动行人区域估计方法[J]. 吉林大学学报(工学版), 2018, 48(3): 694-703. |
| [3] | 曲昭伟, 魏福禄, 魏巍, 李志慧, 胡宏宇. 雷达与视觉信息融合的行人检测方法[J]. 吉林大学学报(工学版), 2013, 43(05): 1230-1234. |
| [4] | 李娟,邵春福,杨励雅. 基于混合高斯模型的行人检测方法[J]. 吉林大学学报(工学版), 2011, 41(01): 41-0045. |
|
||