吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (5): 1796-1801.doi: 10.13229/j.cnki.jdxbgxb20190411
• 计算机科学与技术 • 上一篇
阈值迭代的单目视觉系统中像点质心定位
周婧( ),张小宝,白云龙,侯丽新
),张小宝,白云龙,侯丽新
- 吉林农业大学 信息技术学院,长春 130118
Centroid location of image points in single camera vision measurement system with threshold iteration
Jing ZHOU(),Xiao-bao ZHANG,Yun-long BAI,Li-xin HOU
- College of Information Technology, Jilin Agricultural University, Changchun 130118, China
摘要:
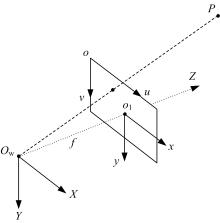
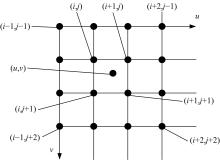
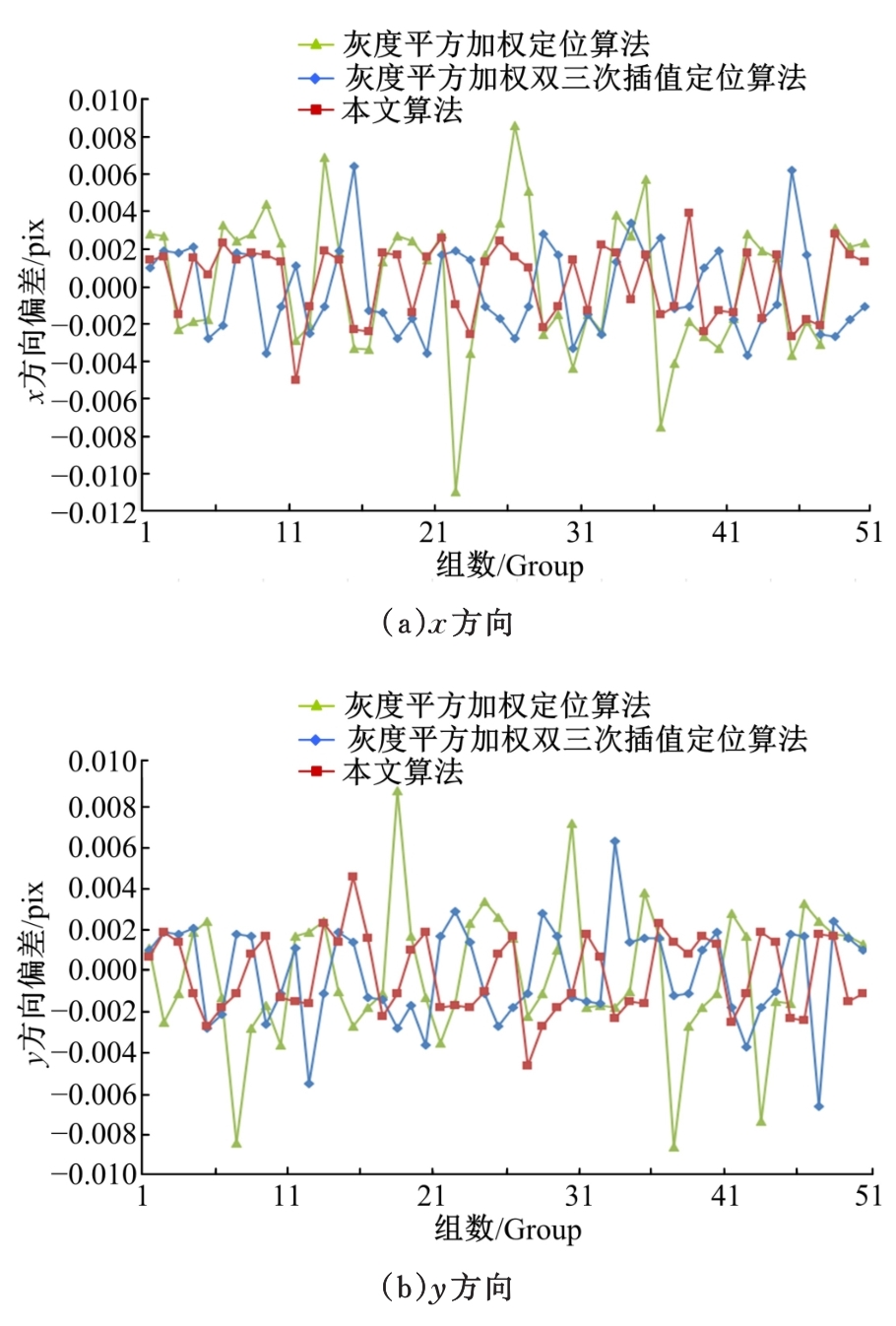
针对大尺寸单目视觉坐标测量系统中二维像点的亚像素定位精度对三维坐标测量精度影响较大的问题,就光学特征点在像平面上的二维像点质心定位方法进行了分析。基于针孔成像原理建立了摄像机模型,讨论了光学特征点对应的二维像点的提取方法,重点研究了二维像点的亚像素定位。提出了基于阈值迭代的像点质心定位方法,该算法通过设置阈值并多次迭代,减小成像对称性差带来的误差;通过三次插值算法,增加参与定位计算的成像中心周围的有效像素点;通过灰度平方加权算法,增加灰度值大的像素点在定位计算中的权重,减小噪声误差。对比实验表明:本文提出的像点质心定位算法可实现1/100以上的像素细分。本文算法在x和y方向的定位标准差分别为0.0022和0.0019 pix,与灰度平方加权质心定位法和双三次插值灰度平方加权质心定位法相比均更小,定位精度更高。x和y方向的定位误差范围分别在0.0039和0.0046 pix以内,与前两种方法相比均更小,定位稳定性更好。本文提出的定位方法可应用于各类近圆形小光源图像的区域亚像素定位。
中图分类号:
- TH741

| 1 | 王向军, 曹雨, 周凯. 二维合作目标的单相机空间位姿测量方法[J]. 光学精密工程, 2017, 25(1): 274-280. |
| Wang Xiang-jun, Cao Yu, Zhou Kai. Methods of monocular pose measurement based on planar objects[J]. Optics and Precision Engineering, 2017, 25(1): 274-280. | |
| 2 | 周婧, 高印寒, 陈小林, 等. 基于单摄像机视觉测量系统的网络化数据融合[J]. 吉林大学学报: 工学版, 2013, 43(1): 92-97. |
| Zhou Jing, Gao Yin-han, Chen Xiao-lin, et al. Networked data fusion based on visual measure system with single camera[J]. Journal of Jilin University(Engineering and Technology Edition), 2013, 43(1): 92-97. | |
| 3 | 王凤艳, 黄润秋, 陈剑平, 等. 基于计算机视觉和测量平差理论的相机标定[J]. 吉林大学学报: 工学版, 2017, 47(3): 944-951. |
| Wang Feng-yan, Huang Run-qiu, Chen Jian-ping, et al. Camera calibration based on computer vision and surveying adjustment fundamentals[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(3): 944-951. | |
| 4 | 周婧, 高印寒, 刘长英, 等. 基于自适应算法的单目视觉系统的姿态解算[J]. 光学精密工程, 2012, 20(12): 2796-2803. |
| Zhou Jing, Gao Yin-han, Liu Chang-ying, et al. Attitude calculation of single camera visual system based on adaptive algorithm[J]. Optical and Precision Engineering, 2012, 20(12): 2796-2803. | |
| 5 | 刘长英, 高乐, 高印寒, 等. 单目视觉坐标测量方法[J]. 吉林大学学报:工学版, 2010, 40(5): 1278-1282. |
| Liu Chang-ying, Gao Le, Gao Yin-han, et al. Measurement of coordinates by single camera vision[J]. Journal of Jilin University(Engineering and Technology Edition), 2010, 40(5): 1278-1282. | |
| 6 | Wang Y Z, Geng B L, Long C. Contour extraction of a laser stripe located on a microscope image from a stereo light microscope[J]. Microscopy Research and Technique, 2019, 82(3): 260-271. |
| 7 | Bisht V, Salgado R. Local transmitting boundaries for the generalized interpolation material point method[J].International Journal for Numerical Methods in Engineering, 2018, 114(11): 1228-1244. |
| 8 | Luxen M. Variance component estimation in performance characteristics applied to feature extraction procedures[J]. Lecture Notes in Computer Science, 2003, 2781: 498-506. |
| 9 | Redert A, Hendriks E, Biemond J. Accurate and robust marker localization algorithm for camera calibration[C]∥IEEE Proceedings of the 1st International Symposium on 3D Data Proceeding Visualization and Transmission, Italy, 2002: 522-525. |
| 10 | Wang Q, Liu Y F, Chen Y Q. Precise locating approach of the beacon based on gray gradient segmentation interpolation in satellite optical communications[J]. Applied Optics, 2017, 56(7): 1826-1832. |
| 11 | Yu Z J, Chen G, Che R S, et al. Bilinear interpolation centroid algorithm using for circular optical target location[J]. Proceedings of Second International Conference on Image and Graphics, 2002, 4875: 333-339. |
| 12 | Idais H, Yasin M, Pasadas M, et al. Optimal knots allocation in the cubic and bicubic spline Interpolation problems[J]. Mathematics and Computers in Simulation, 2018, 164: 131-145. |
| [1] | 万平,吴超仲,马晓凤. 基于ROC曲线和驾驶行为特征的驾驶愤怒强度判别阈值[J]. 吉林大学学报(工学版), 2020, 50(1): 121-131. |
| [2] | 翁小辉,孙友宏,张书军,谢军,常志勇. 基于仿生鼻腔优化的油气检测方法与实验新技术[J]. 吉林大学学报(工学版), 2020, 50(1): 382-388. |
| [3] | 闫光,卢建中,张开宇,孟凡勇,祝连庆. 温度解耦大量程光纤光栅应变传感器[J]. 吉林大学学报(工学版), 2019, 49(5): 1682-1688. |
| [4] | 王家序,蒋倩倩,李俊阳,韩彦峰,张雷,唐挺. 双圆弧谐波传动柔轮齿形参数多目标优化设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1194-1202. |
| [5] | 仇艳凯, 李宝仁, 杨钢, 曹博, 刘真. 新型液压消声器吸收液压系统压力脉动的机理和特性[J]. 吉林大学学报(工学版), 2018, 48(4): 1085-1091. |
| [6] | 吴疆, 徐壮, 刘丽佳, 嵇艳鞠, 李肃义. 基于环绕式血氧探头的睡眠呼吸暂停综合征检测装置原型设计与开发[J]. 吉林大学学报(工学版), 2018, 48(2): 640-644. |
| [7] | 杨诚, 宋萍, 彭文家, 金昊龙, 潘志强. 基于混合总线的装甲车辆实车综合测试系统设计[J]. 吉林大学学报(工学版), 2018, 48(1): 186-198. |
| [8] | 高坤, 涂辉招, 时恒, 李振飞. 雾霾天气低能见度对不同跟驰状态驾驶行为的影响[J]. 吉林大学学报(工学版), 2017, 47(6): 1716-1727. |
| [9] | 杨诚, 宋萍, 彭文家, 邓高寿, 刘雄军. 装甲车辆综合测试系统上位机平台设计[J]. 吉林大学学报(工学版), 2017, 47(6): 1796-1803. |
| [10] | 柏德恩, 全齐全, 李贺, 陈雅文, 邓宗全. 伺服加载的谐波减速器启动力矩测试系统[J]. 吉林大学学报(工学版), 2017, 47(6): 1804-1810. |
| [11] | 王天皓, 王忠福, 王雨蒙, 杨开宇, 高印寒, 马喜来. 基于混沌多项式展开法的线束串扰统计模型[J]. 吉林大学学报(工学版), 2017, 47(5): 1568-1576. |
| [12] | 陈赫, 杨智君, 吴昭春, 冯志刚, 赵科佳, 李抵非, 田地. 标准失真模拟分量视频信号源及其校准方法[J]. 吉林大学学报(工学版), 2017, 47(4): 1159-1164. |
| [13] | 诸葛晶昌, 吴军, 詹湘琳, 于之靖. 基于自适应小波去噪法的精密超声波测距方法[J]. 吉林大学学报(工学版), 2017, 47(4): 1301-1307. |
| [14] | 刘晓为, 李海, 翁睿, 张海峰, 赵军. 应用静电力矩改善新型转子式陀螺的动态特性[J]. 吉林大学学报(工学版), 2017, 47(3): 850-854. |
| [15] | 林君, 赵越, 蒋川东, 王应吉. 基于优化Block反演的地面磁共振测深新方法[J]. 吉林大学学报(工学版), 2017, 47(2): 530-539. |
|
||