吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (8): 2395-2403.doi: 10.13229/j.cnki.jdxbgxb.20211090
• 通信与控制工程 • 上一篇
基于点云直方图的回环检测算法和车辆定位方法
李寿涛1( ),李嘉霖1,2,孟庆瑜1,2,郭洪艳1,2()
),李嘉霖1,2,孟庆瑜1,2,郭洪艳1,2()
- 1.吉林大学 通信工程学院,长春 130022
2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Loop-closure detection algorithm based on point cloud histogram and vehicle positioning method
Shou-tao LI1(),Jia-lin LI1,2,Qing-yu MENG1,2,Hong-yan GUO1,2()
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
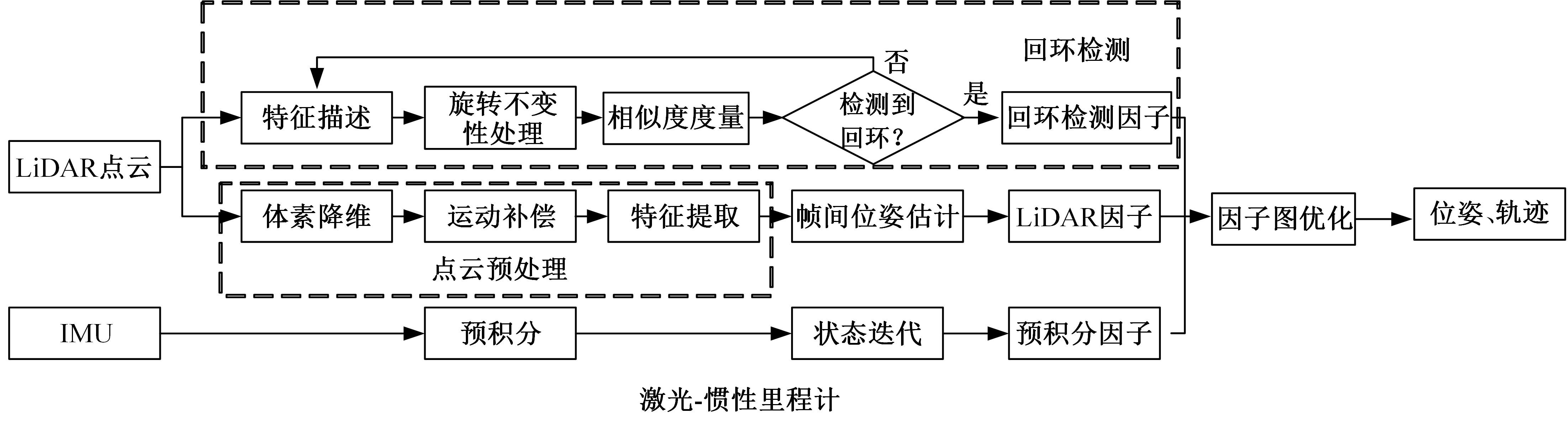
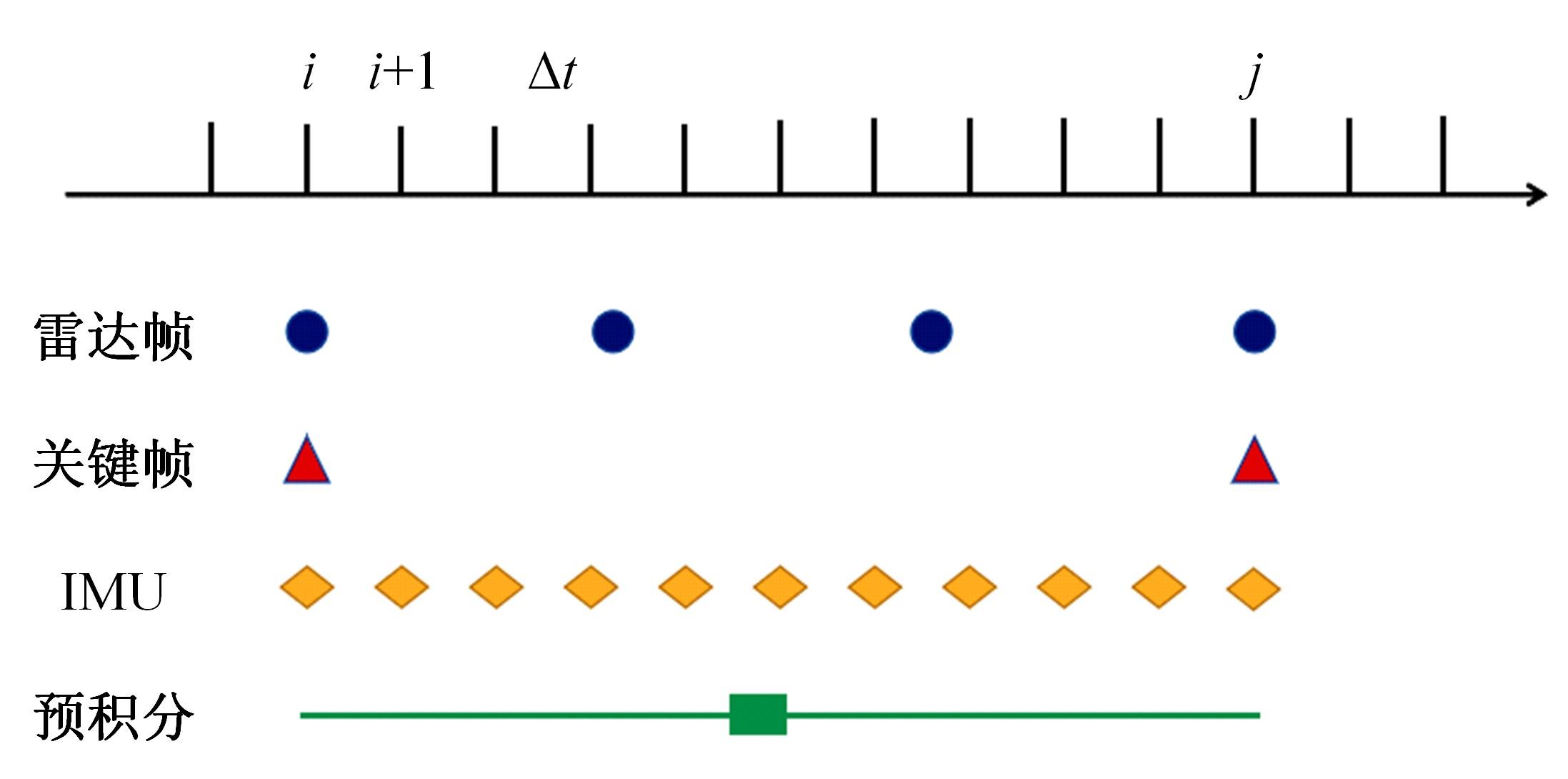
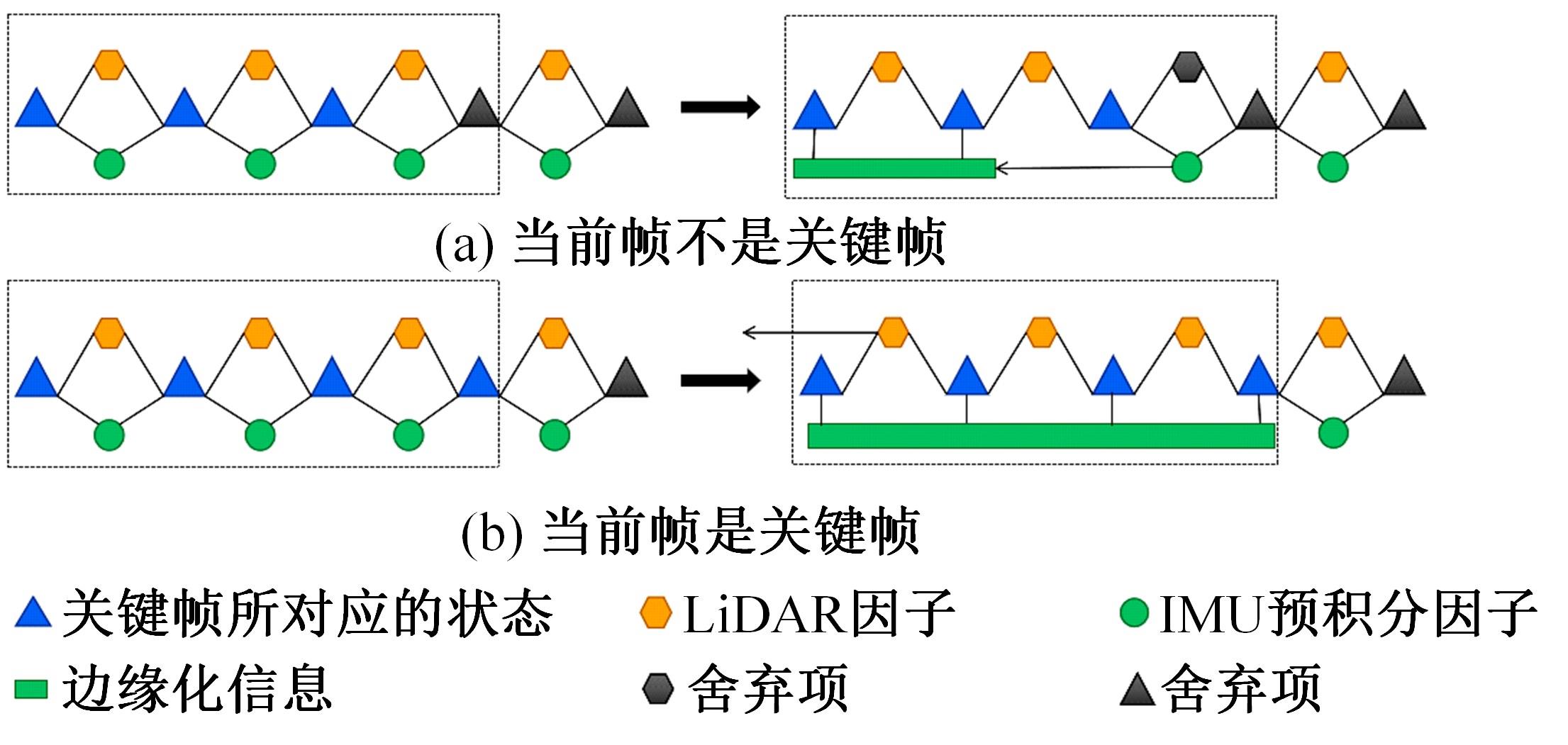
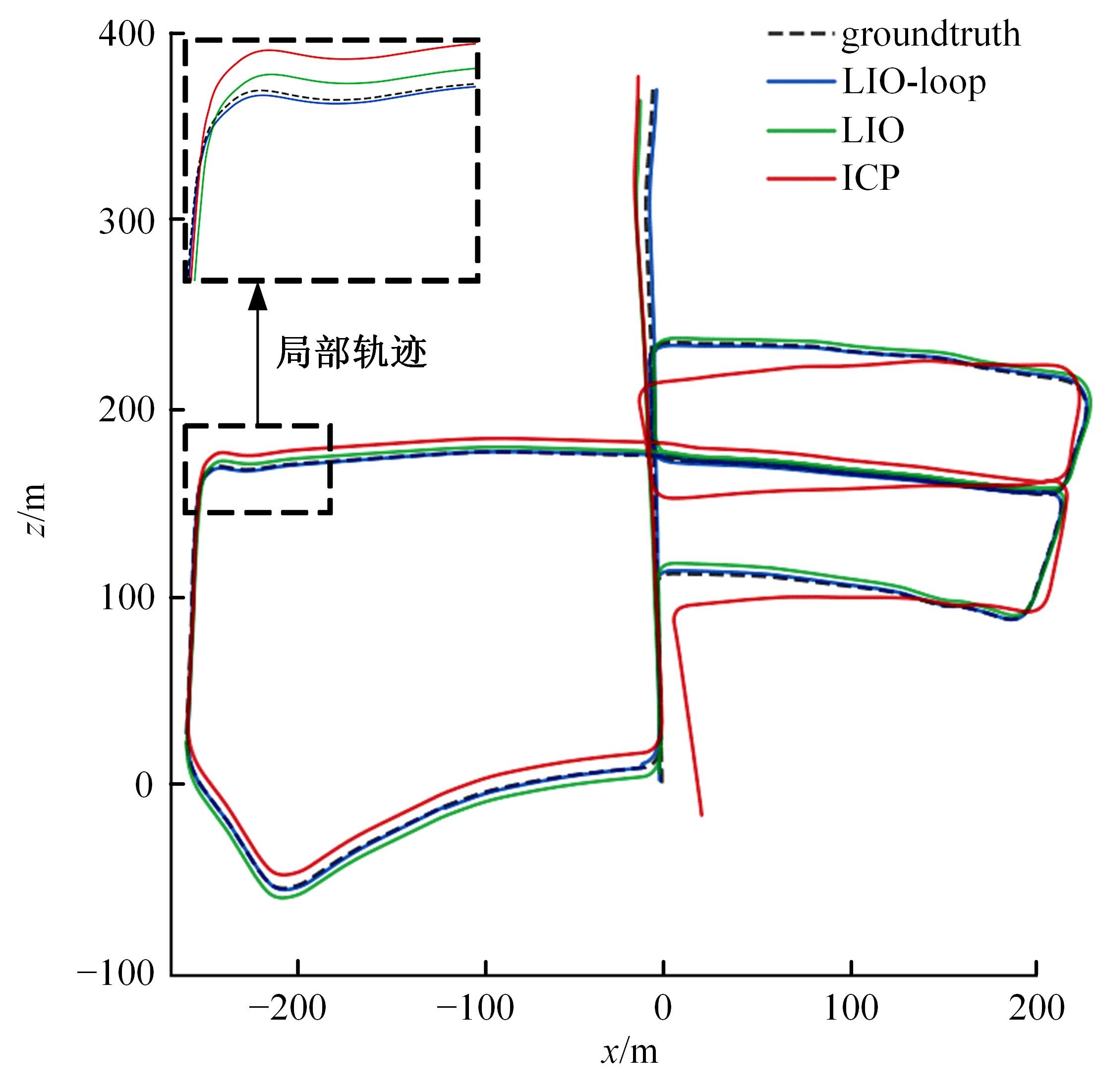
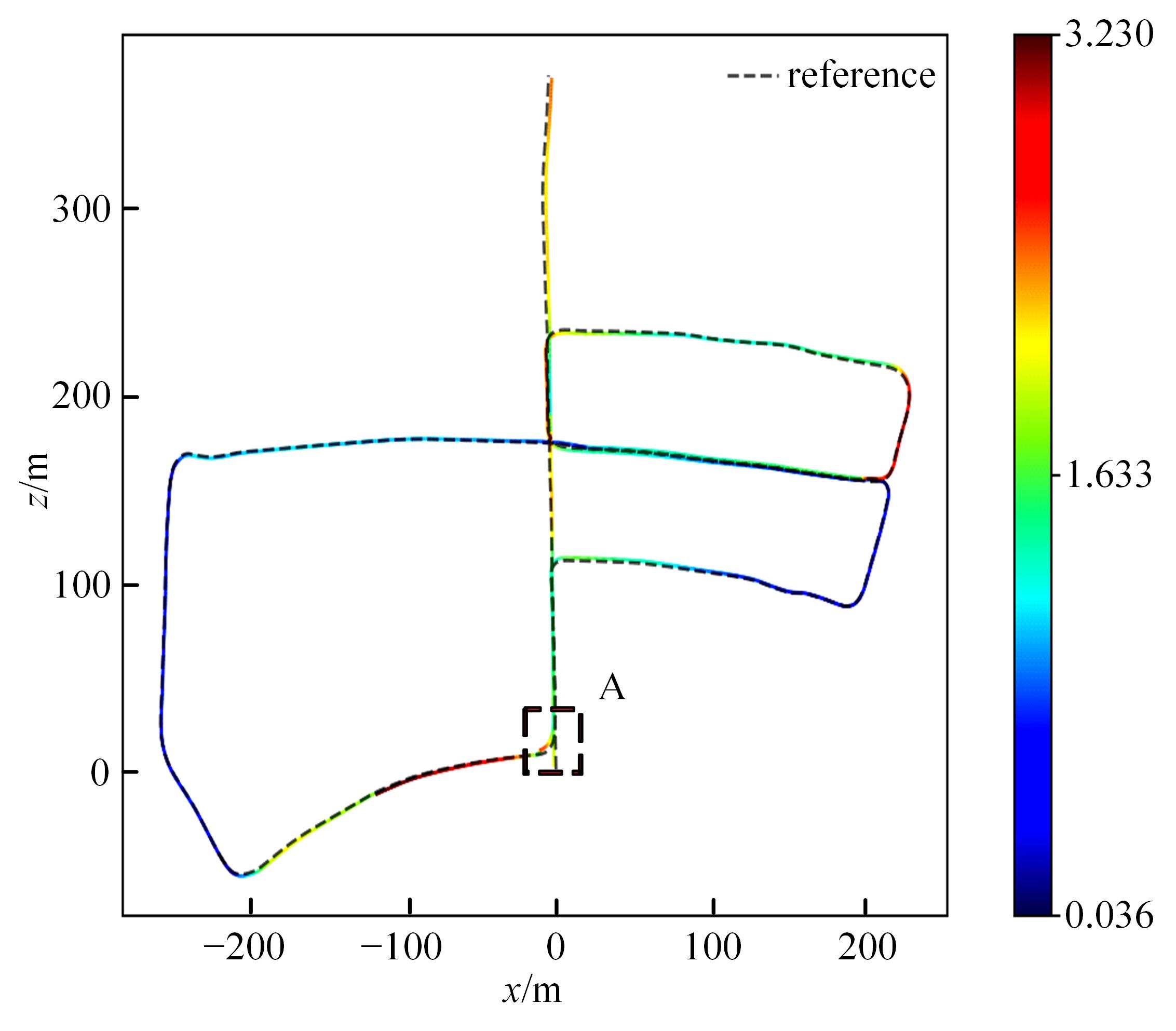
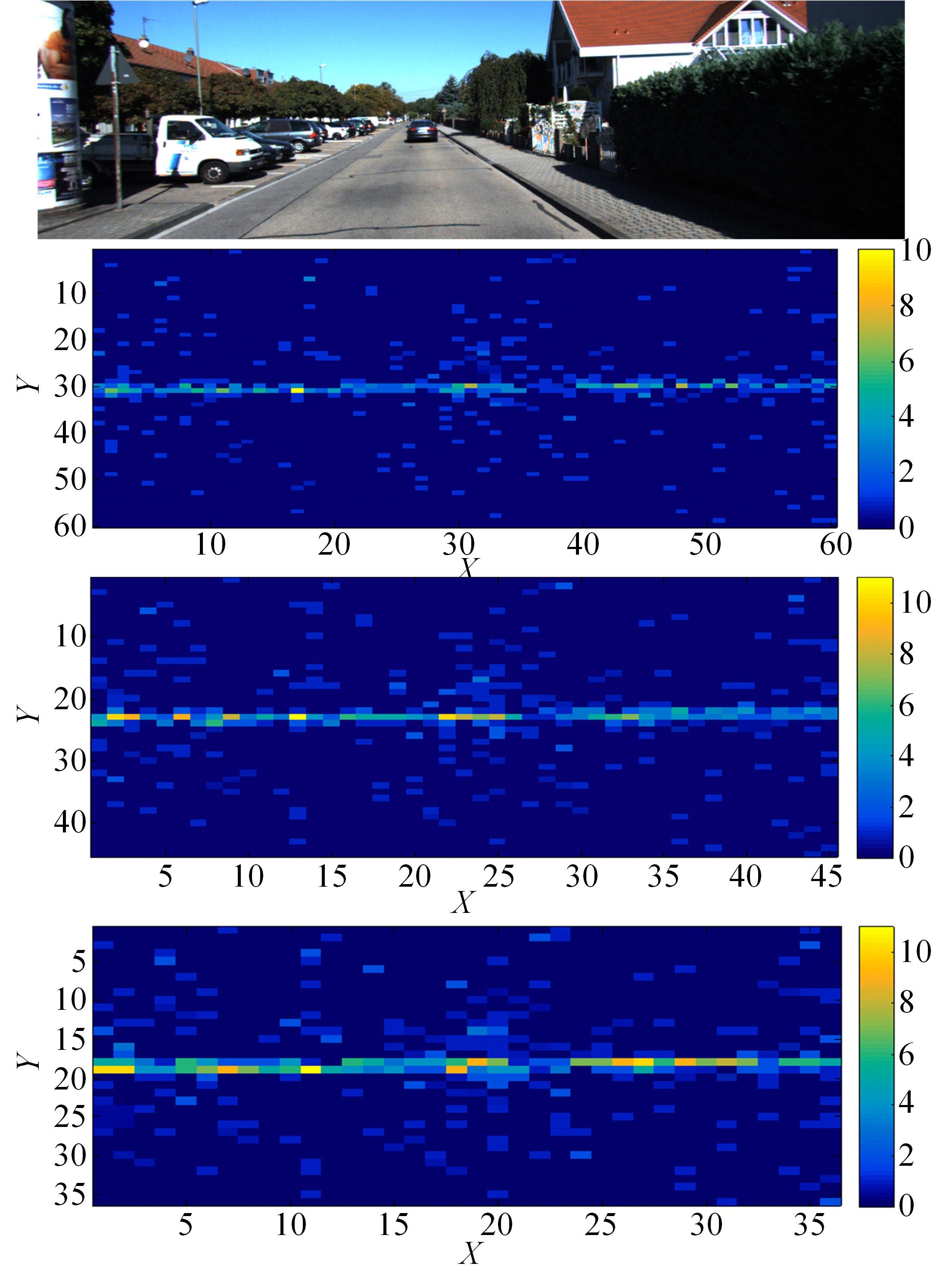
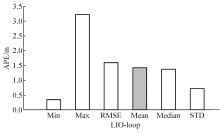
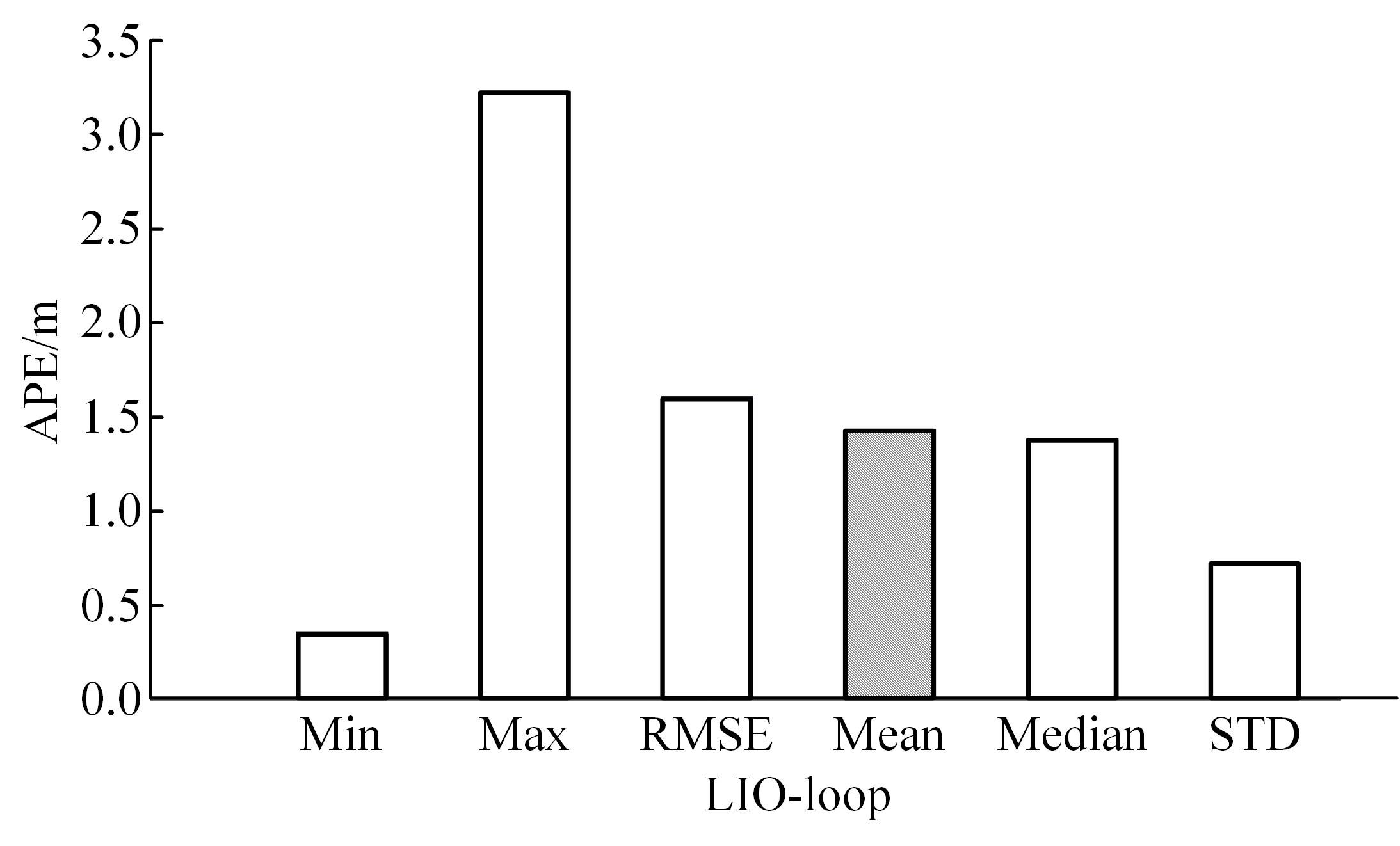
针对智能车辆在城市复杂路段由于全球定位系统GPS信号丢失导致的定位失准问题,建立因子图优化模型对激光雷达和惯性测量单元进行数据融合,提出一种紧耦合框架下的激光-惯性里程计(LIO)车辆定位方法,实时估计车辆状态信息;并提出基于点云直方图的回环检测算法,通过计算车辆当前位置与历史时刻位置间点云的相似度判断车辆是否到达同一位置,进而结合上一次经过该位置时的信息校正车辆当前状态,减少定位误差的积累。KITTI数据集上的测试结果表明:回环检测模块可有效降低LIO的误差积累,带有回环检测模块的LIO具备良好的定位精度。
中图分类号:
- TP391.4


| 1 | 肖光年, 隽志才, 高晶鑫. 基于GPS定位数据的出行端点推断[J]. 吉林大学学报: 工学版, 2016, 46(3): 770-776. |
| Xiao Guang-nian, Zhi-cai Jun, Gao Jing-xin. Travel endpoint inference based on GPS positioning data[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(3): 770-776. | |
| 2 | Qin C, Ye H, Pranata C E, et al. Lins: a lidar-inertial state estimator for robust and efficient navigation[C]∥IEEE International Conference on Robotics and Automation, Paris, 2020: 8899-8906. |
| 3 | 兰凤崇, 李继文, 陈吉清. 面向动态场景复合深度学习与并行计算的DG-SLAM算法[J]. 吉林大学学报: 工学版, 2021, 51(4): 1437-1446. |
| Lan Feng-chong, Li Ji-wen, Chen Ji-qing. DG-SLAM algorithm for dynamic scene compound deep learning and parallel computing[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1437-1446. | |
| 4 | Xie G, Zong Q, Zhang X, et al. Loosely-coupled lidar-inertial odometry and mapping in real time[J]. International Journal of Intelligent Robotics and Applications, 2021, 5(2): 119-129. |
| 5 | Zhang J, Singh S. LOAM: lidar odometry and mapping in real-time[J]. Robotics: Science and Systems. 2014, 2(9) : 1-9. |
| 6 | Chen P, Shi W, Bao S, et al. Low-drift odometry, mapping and ground segmentation using a backpack LiDAR system[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7285-7292. |
| 7 | 宋锐, 方勇纯, 刘辉. 基于LiDAR/INS的野外移动机器人组合导航方法[J]. 智能系统学报, 2020, 15(4): 804-810. |
| Song Rui, Fang Yong-chun, Liu Hui. Integrated navigation method for mobile robots in the field based on LiDAR/INS[J]. Journal of Intelligent Systems, 2020, 15(4): 804-810. | |
| 8 | Ye H, Chen Y, Liu M. Tightly coupled 3d lidar inertial odometry and mapping[C]∥International Conference on Robotics and Automation, Shenyang, China, 2019: 3144-3150. |
| 9 | Meng Q, Guo H, Zhao X, et al. Loop-closure detection with a multiresolution point cloud histogram mode in lidar odometry and mapping for intelligent vehicles[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1307-1317. |
| 10 | Jiang K, Zhang X, Qin B, et al. Feature-based loop closure detection and optimization for LiDAR mapping[J]. SAE Technical Paper, 2020-01-5225. |
| 11 | Li K, Li M, Hanebeck U D. Towards high-performance solid-state-lidar-inertial odometry and mapping[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5167-5174. |
| 12 | 吴环宇. 基于激光雷达的智能车辆三维地图构建和定位算法研究[D].长春: 吉林大学汽车工程学院, 2020. |
| Wu Huan-yu. Research on intelligent vehicle 3D map construction and positioning algorithm based on lidar[D]. Changchun: College of Automotive Engineering, Jilin University, 2020. | |
| 13 | Shan T, Englot B, Meyers D, et al. Lio-sam: tightly-coupled lidar inertial odometry via smoothing and mapping[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, 2020: 5135-5142. |
| 14 | Zhang J, Singh S. Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2): 401-416. |
| 15 | Liu Z, Li Y, Chen C. Application of IMU pre-integration in variable-height lidar odometry[C]∥4th International Conference on Robotics and Automation Sciences, Wuhan, China, 2020: 112-116. |
| 16 | Qin T, Li P, Shen S. Vins-mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. |
| 17 | Magnusson M, Andreasson H, Nüchter A, et al. Automatic appearance-based loop detection from three-dimensional laser data using the normal distributions transform[J]. Journal of Field Robotics, 2009, 26(11/12): 892-914. |
| 18 | Geiger A, Lenz P, Stiller C, et al. Vision meets robotics: The kitti dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 19 | Kim G, Park B, Kim A. 1-day learning, 1-year localization: long-term lidar localization using scan context image[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 1948-1955. |
| [1] | 张冲,胡云峰,宫洵,孙耀. 燃料电池阴极流量无模型自适应滑模控制器设计[J]. 吉林大学学报(工学版), 2022, 52(9): 2085-2095. |
| [2] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [3] | 刘远红,郭攀攀,张彦生,李鑫. 基于黎曼流形的稀疏图保持投影的特征提取[J]. 吉林大学学报(工学版), 2021, 51(6): 2268-2279. |
| [4] | 何德峰,罗捷,舒晓翔. 自主网联车辆时滞反馈预测巡航控制[J]. 吉林大学学报(工学版), 2021, 51(1): 349-357. |
| [5] | 王荣本, 顾柏园, 郭烈, 余天洪. 基于分形盒子维数的车辆定位和识别方法[J]. 吉林大学学报(工学版), 2006, 36(03): 331-0335. |
|
||