吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (1): 349-357.doi: 10.13229/j.cnki.jdxbgxb20190949
• 通信与控制工程 • 上一篇
自主网联车辆时滞反馈预测巡航控制
何德峰( ),罗捷,舒晓翔
),罗捷,舒晓翔
- 浙江工业大学 信息工程学院,杭州 310023
Delay-feedback predictive cruise control of autonomous and connected vehicles
De-feng HE(),Jie LUO,Xiao-xiang SHU
- College of Information Engineering,Zhejiang University of Technology,Hangzhou 310023,China
摘要:
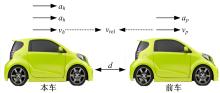
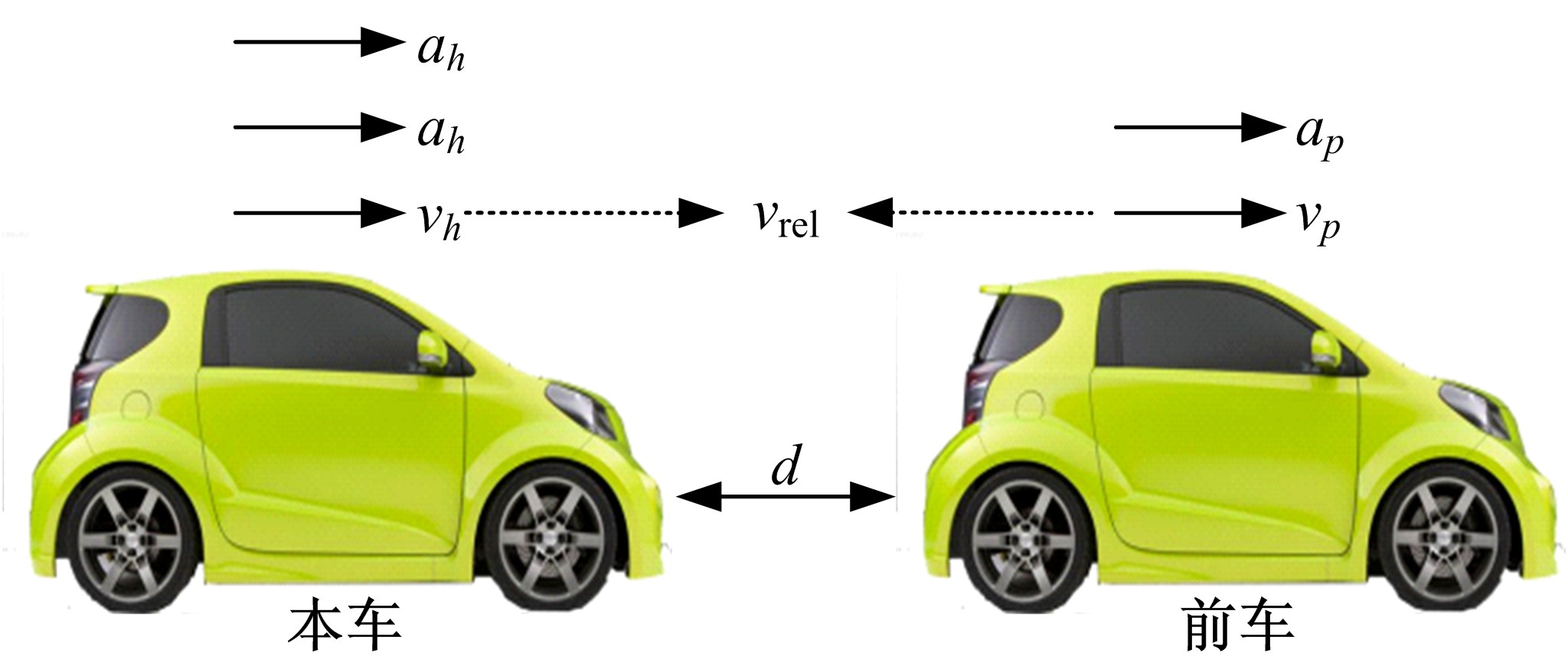
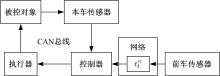
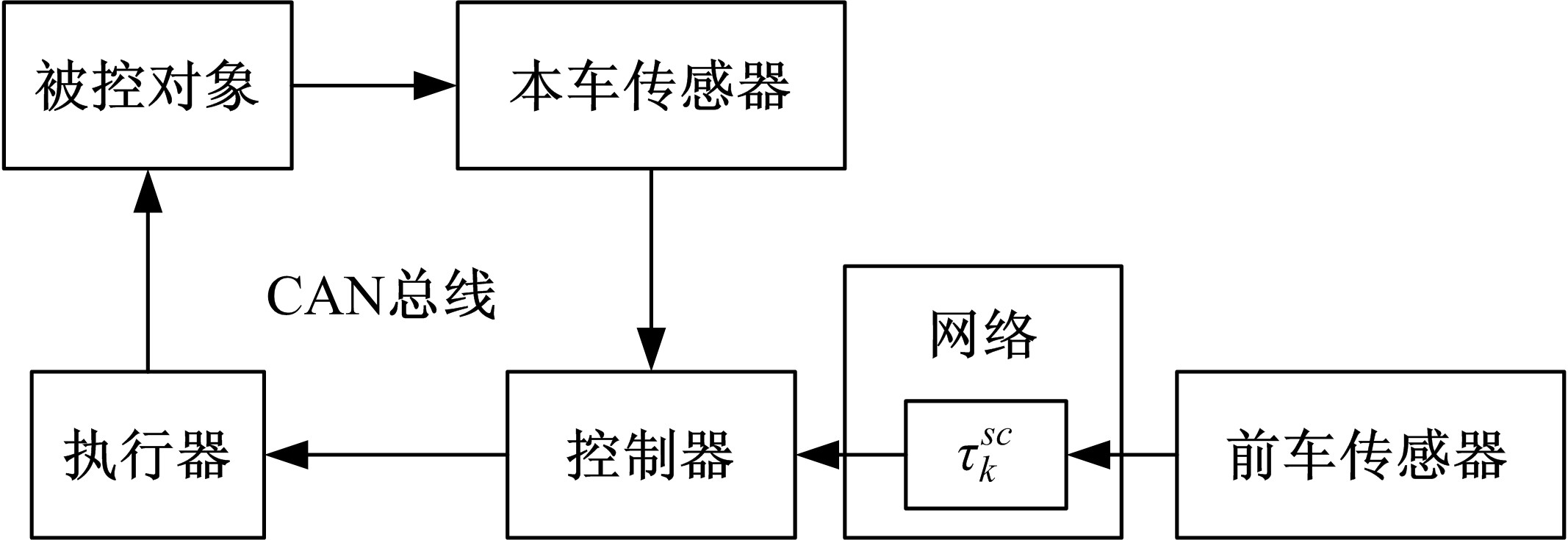
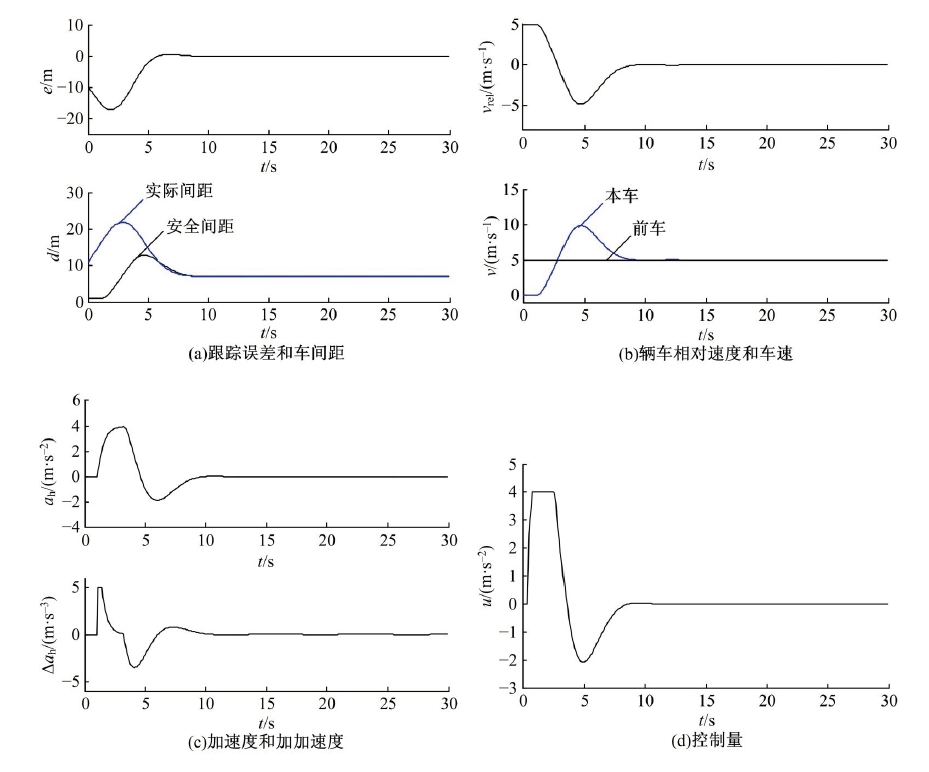
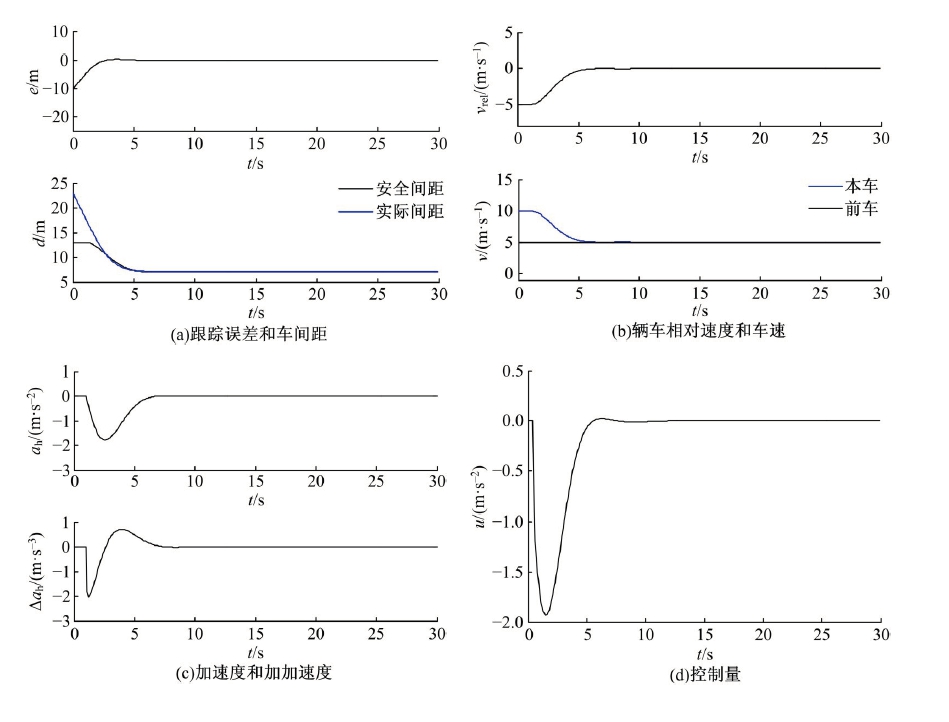
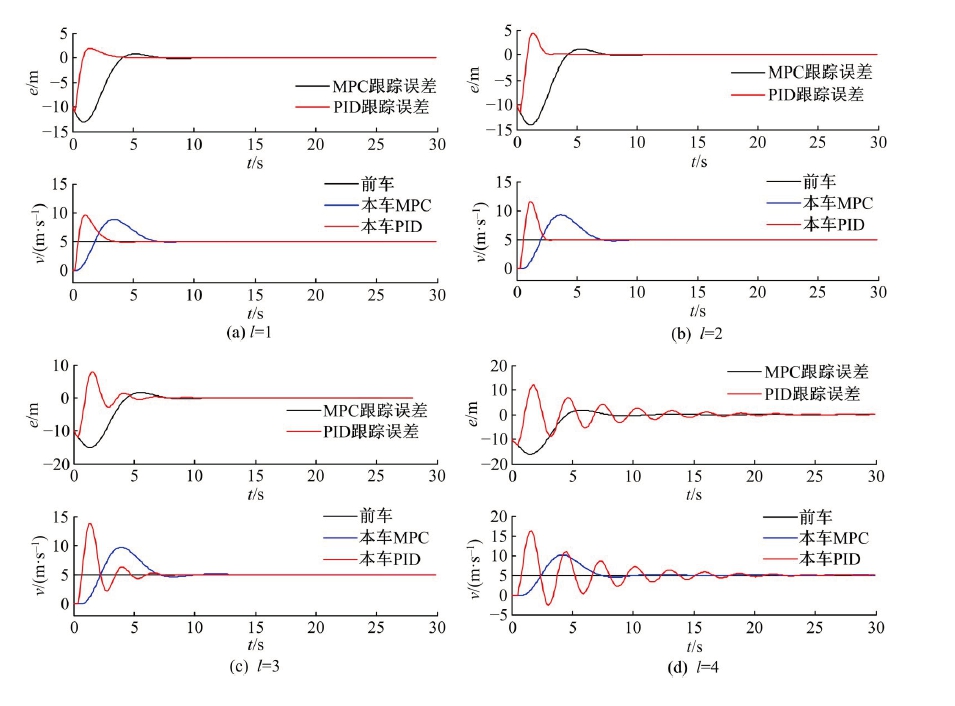
考虑车联网环境下的车辆自适应巡航控制问题,提出一种针对前车信息传输存在有界长时延的自主车辆时滞反馈预测巡航控制策略。首先建立自主网联车辆自适应巡航系统的增量控制时滞模型,再考虑车辆行驶安全性、舒适性和燃油经济性等指标,结合滚动优化原理定义时滞反馈预测巡航控制器。进一步,利用Lyapunov稳定性定理和线性矩阵不等式技术,建立保证自主车辆预测巡航控制系统闭环稳定性的时滞相关充分性条件。最后,通过与PID控制比较仿真验证本文方法的有效性。
中图分类号:
- TP273

| 1 | 李升波. 车辆多目标协调式自适应巡航控制[D]. 北京:清华大学车辆学院, 2009. |
| Li Sheng-bo. Vehicular multi-objective coordinated adaptive cruise control[D]. Beijing: School of Vehicles, Tsinghua University, 2009. | |
| 2 | 孙煜, 何德峰, 吴赛男, 等. 基于Eclipse平台的车辆自适应巡航控制仿真[J]. 计算机工程与应用, 2017,53(23): 250-255, 266. |
| Sun Yu, He De-feng, Wu Sai-nan, et al. Simulation of vehicle adaptive cruise control based on Eclipse platform[J]. Computer Engineering and Applications, 2017, 53(23): 250-255, 266. | |
| 3 | 何文韬, 何德峰, 崔靖龙, 等. 网联车辆自适应巡航控制算法验证平台设计[J]. 计算机工程与应用, 2019, 55(14): 235-241. |
| He Wen-tao, He De-feng, Cui Jing-long, et al. Design of verification platform for adaptive cruise control algorithm of connected vehicles[J]. Computer Engineering and Applications, 2019, 55(14): 235-241. | |
| 4 | 岳伟, 郭戈. 通讯网络影响下自主车队的控制[J]. 控制理论与应用, 2011, 28(7): 1041-1048. |
| Yue Wei, Guo Ge. Control of autonomous platoon under networked communication effect[J]. Control Theory and Applications, 2011, 28(7): 1041-1048. | |
| 5 | 岳伟, 郭戈, 王丽媛. 通讯网络影响下自主车队分散式控制[J]. 东南大学学报:自然科学版, 2011, 41(): 144-151. |
| Yue Wei, Guo Ge, Wang Li-yuan. Decentralized control of autonomous platoon under networked communication effect[J]. Journal of Southeast University(Natural Science Edition), 2011, 41(Sup.1): 144-151. | |
| 6 | 张俊, 罗大庸. 网络控制系统的Smith预估时滞补偿方法[J]. 哈尔滨理工大学学报, 2012, 17(5): 34-38. |
| Zhang Jun, Luo Da-yong. Smith predictive method for time delay of networked control systems[J]. Journal of Harbin University of Science and Technology, 2012, 17(5): 34-38. | |
| 7 | 马永光, 贾君茹, 薄俊青. 网络控制系统Smith预估时滞补偿方法的研究[J]. 工业控制计算机, 2014, 27(10): 41-42, 45. |
| Ma Yong-guang, Jia Jun-ru, Bo Jun-qing. Smith predictive time-delay compensation methods in network control systems[J]. Industrial Control Computer, 2014, 27(10): 41-42, 45. | |
| 8 | 杨蒙蒙, 钱伟. 基于神经网络预测的网络化控制系统故障检测[J]. 信息与控制, 2018, 47(1): 36-40, 47. |
| Yang Meng-meng, Qian Wei. Fault detection of networked control systems based on neural network prediction[J]. Information and Control, 2018, 47(1): 36-40, 47. | |
| 9 | 邱占芝, 李世峰. 基于神经网络的PID网络化控制系统建模与仿真[J]. 系统仿真学报, 2018, 30(4): 1423-1432. |
| Qiu Zhan-zhi, Li Shi-feng. Modeling and simulation of PID networked control systems based on neural network[J]. Journal of System Simulation, 2018, 30(4): 1423-1432. | |
| 10 | 李春茂, 肖建, 张玥. 网络化控制系统两种时延预测算法及其比较[J]. 计算机应用, 2007, 27(2): 257-260, 264. |
| Li Chun-mao, Xiao Jian, Zhang Yue. Comparison of two predictive algorithms for time delay in networked control systems[J]. Computer Applications, 2007, 27(2): 257-260, 264. | |
| 11 | 李春茂, 肖建, 张玥. 基于LS-SVM的网络化控制系统自适应预测控制[J]. 系统仿真学报, 2007, 19(15): 3494-3498, 3502. |
| Li Chun-mao, Xiao Jian, Zhang Yue. Approach of adaptive prediction control on networked control systems based on least-squares support vector machines[J]. Journal of System Simulation, 2007, 19(15): 3494-3498, 3502. | |
| 12 | 席裕庚. 预测控制[M]. 北京: 国防科技出版社, 1993. |
| 13 | 刘国平, 孙键, 赵云波. 网络化预测控制系统的设计、分析与实时实现(英文)[J]. 自动化学报, 2013, 39(11): 1769-1777. |
| Liu Guo-ping, Sun Jian, Zhao Yun-bo. Design, analysis and real time implementation of networked predictive control systems[J]. Acta Automatica Sinica, 2013, 39(11): 1769-1777. | |
| 14 | Zhang Tian-yong, Liu Guo-ping. Predictive tracking control of network-based agents with communication delays[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(6): 1150-1156. |
| 15 | 周洲, 何德峰, 俞立. 网络化动态矩阵控制及在倒立摆控制中的应用[J]. 化工自动化及仪表, 2012, 39(8): 1043-1046. |
| Zhou Zhou, He De-feng, Yu Li. Networked dynamic matrix control and its application to inverted pendulum control[J]. Control and Instruments in Chemical Industry, 2012, 39(8): 1043-1046. | |
| 16 | 谢成祥, 胡维礼. 时延网络控制系统的模型预测控制[J]. 信息与控制, 2008, 37(2): 171-175. |
| Xie Cheng-xiang, Hu Wei-li. Model predictive control of networked control systems with time-delay[J]. Information and Control, 2008, 37(2): 171-175. | |
| 17 | 胡吉. 基于MPC算法的混合动力汽车自适应巡航控制研究[D]. 重庆: 重庆大学汽车工程学院, 2015. |
| Hu Ji. The research on adaptive cruise control for a hybrid electric vehicle based on MPC algorithm[D]. Chongqing: College of Automotive Engineering, Chongqing University, 2015. | |
| 18 | 王秋. 基于滚动优化的车辆自适应巡航控制[D]. 长春: 吉林大学通信工程学院, 2017. |
| Wang Qiu. Vehicle adaptive cruise control based on rolling optimization[D]. Changchun: College of Communication Engineering, Jilin University, 2017. | |
| 19 | 孙小雨. 基于模型预测控制的车辆协同式自适应巡航控制[D]. 哈尔滨: 哈尔滨工业大学航天学院, 2018. |
| Sun Xiao-yu. Vehicle cooperative adaptive cruise control based on model predictive control[D]. Harbin: School of Astronautics, Harbin Institute of Technology, 2018. | |
| 20 | He D, He W, Song X, et al. Predictive cruise control of vehicles with pre-planned acceleration/ deceleration command[C]∥The 29th Chinese Control And Decision Conference(CCDC), Chongqing, 2017: 7558-7563. |
| 21 | Gao Zhen-hai, Hai Song. Study on the electric vehicle adaptive cruise control based on the model predictive control algorithm[C]∥International Conference on Green Intelligent Transportation Systems, Singapore, 2017: 39-51. |
| 22 | 罗莉华, 龚李龙, 李平, 等. 考虑驾驶员行驶特性的双模式自适应巡航控制设计[J]. 浙江大学学报:工学版, 2011, 45(12): 2073-2078. |
| Luo Li-hua, Gong Li-long, Li Ping, et al. Two-mode adaptive cruise control design with humans' driving habits consideration[J]. Journal of Zhejiang University(Engineering Science), 2011, 45(12): 2073-2078. | |
| 23 | 余世明, 吴赛男, 何德峰. 传感器量程和行驶约束车辆队列模型预测控制[J]. 信息与控制, 2018, 47(1): 60-67, 74. |
| Yu Shi-ming, Wu Sai-nan, He De-feng. Model predictive control of vehicle platoons subject to constraints on limited range of sensors and driving[J]. Information and Control, 2018, 47(1): 60-67, 74. | |
| 24 | 吴志红, 黄思源, 朱元. 汽车自适应巡航控制的间距策略[J]. 科学技术与工程, 2014, 14(15): 295-299, 311. |
| Wu Zhi-hong, Huang Si-yuan, Zhu Yuan. Distance strategy of adaptive cruise control of vehicle[J]. Science Technology and Engineering, 2014, 14(15): 295-299, 311. | |
| 25 | Oncu S, Ploeg J, van de Wouw N, et al. Cooperative adaptive cruise control: network-aware analysis of string stability[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1527-1537. |
| 26 | 刘安东, 季鹏, 张文安, 等. 具有时延和乱序网络化系统的动态矩阵控制[J]. 系统科学与数学, 2017, 37(7): 1555-1565. |
| Liu An-dong, Ji Peng, Zhang Wen-an, et al. Dynamic matrix control for networked system with time delay and packet disordering[J]. Journal of Systems Science and Mathematical Sciences, 2017, 37(7): 1555-1565. | |
| 27 | 周洲. 多变量时变时延系统DMC算法及应用研究[D]. 杭州:浙江工业大学信息工程学院, 2012. |
| Zhou Zhou. Research on dynamic matrix control algorithms and its applications for multivariable time-varying delay systems[D]. Hangzhou: College of Information Engineering, Zhejiang University of Technology, 2012. | |
| 28 | 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014. |
| 29 | 俞立. 鲁棒控制-线性矩阵不等式处理方法[M]. 北京: 清华大学出版社, 2003. |
| [1] | 梁泉,翁剑成,周伟,荣建. 基于关联规则的公共交通通勤稳定性人群辨识[J]. 吉林大学学报(工学版), 2019, 49(5): 1484-1491. |
| [2] | 秦嘉浩,李臻,光岡宗司,井上英二,宋正河,朱忠祥. 基于模型实验的拖拉机配置对稳定性的影响差异[J]. 吉林大学学报(工学版), 2019, 49(4): 1236-1245. |
| [3] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [4] | 贾拓,赵丁选,崔玉鑫. 铰接式装载机倾翻预警方法[J]. 吉林大学学报(工学版), 2018, 48(6): 1762-1769. |
| [5] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [6] | 金立生, 谢宪毅, 高琳琳, 郭柏苍. 基于二次规划的分布式电动汽车稳定性控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1349-1359. |
| [7] | 秦静, 徐鹤, 裴毅强, 左子农, 卢莉莉. 初始温度和初始压力对甲烷-甲醇裂解气预混层流燃烧特性的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1475-1482. |
| [8] | 宫洵, 蒋冰晶, 胡云峰, 曲婷, 陈虹. 柴油机主-从双微元Urea-SCR系统非线性状态观测器设计与分析[J]. 吉林大学学报(工学版), 2018, 48(4): 1055-1062. |
| [9] | 牟宗磊, 宋萍, 翟亚宇, 陈晓笑. 分布式测试系统同步触发脉冲传输时延的高精度测量方法[J]. 吉林大学学报(工学版), 2018, 48(4): 1274-1281. |
| [10] | 陈东辉, 吕建华, 龙刚, 张宇晨, 常志勇. 基于ADAMS的半悬挂式农业机组静侧翻稳定性[J]. 吉林大学学报(工学版), 2018, 48(4): 1176-1183. |
| [11] | 宫亚峰, 何钰龙, 谭国金, 申杨凡. 三跨独柱连续曲线梁桥抗倾覆稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(1): 133-140. |
| [12] | 何仁, 陈珊珊. 基于液力缓速器换挡控制的半挂汽车列车制动稳定性[J]. 吉林大学学报(工学版), 2017, 47(6): 1677-1687. |
| [13] | 罗蓉, 曾哲, 张德润, 冯光乐, 董华均. 基于插板法膜压力模型的沥青混合料水稳定性评价[J]. 吉林大学学报(工学版), 2017, 47(6): 1753-1759. |
| [14] | 汤华国, 马贤锋, 赵伟, 刘建伟, 赵振业. 高性能金属铝的制备、微观结构及其热稳定性[J]. 吉林大学学报(工学版), 2017, 47(5): 1542-1547. |
| [15] | 林君, 赵越, 蒋川东, 王应吉. 基于优化Block反演的地面磁共振测深新方法[J]. 吉林大学学报(工学版), 2017, 47(2): 530-539. |
|
||