吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (11): 3604-3613.doi: 10.13229/j.cnki.jdxbgxb.20240126
• 交通运输工程·土木工程 • 上一篇
考虑自动驾驶小客车的高速公路施工区上游过渡区间距
杨柳1,2( ),李鸿辉1,2,李文芳3
),李鸿辉1,2,李文芳3
- 1.长沙理工大学 公路养护技术国家工程实验室,长沙 410114
2.长沙理工大学 交通学院,长沙 410114
3.黄河交通学院,河南 焦作 454950
Distance between upstream transition zones of freeway work zone considering automatic cars
Liu YANG1,2(),Hong-hui LI1,2,Wen-fang LI3
- 1.National Engineering Laboratory of Highway Maintenance Technology,Changsha University of Science & Technology,Changsha 410114,China
2.School of Transportation,Changsha University of Science & Technology,Changsha 410114,China
3.Huanghe Jiaotong University,Jiaozuo 454950,China
摘要:
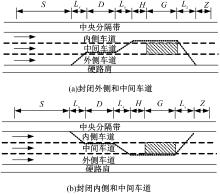
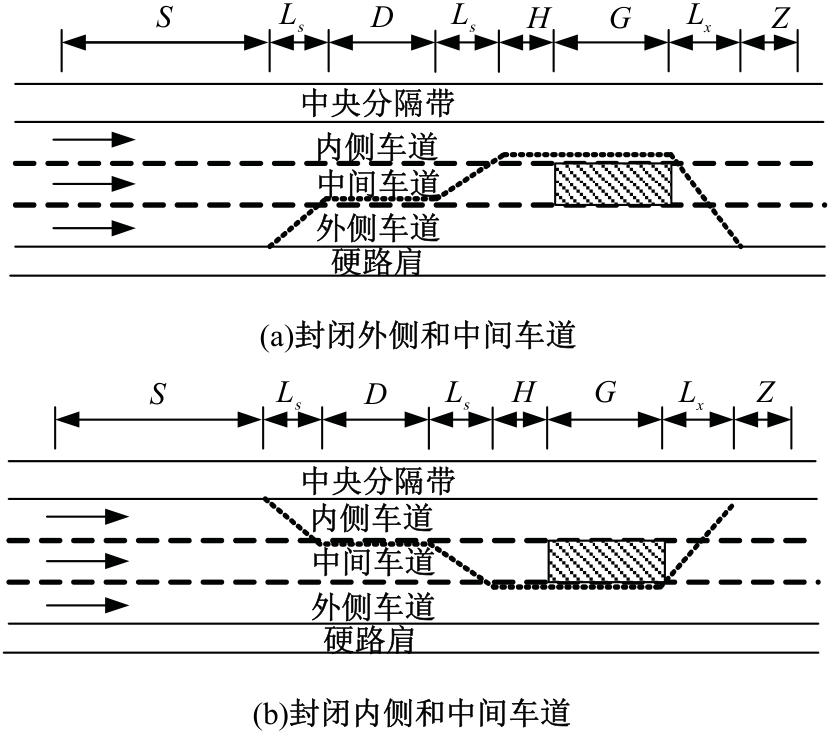
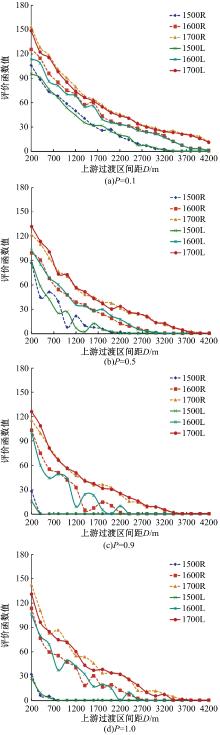
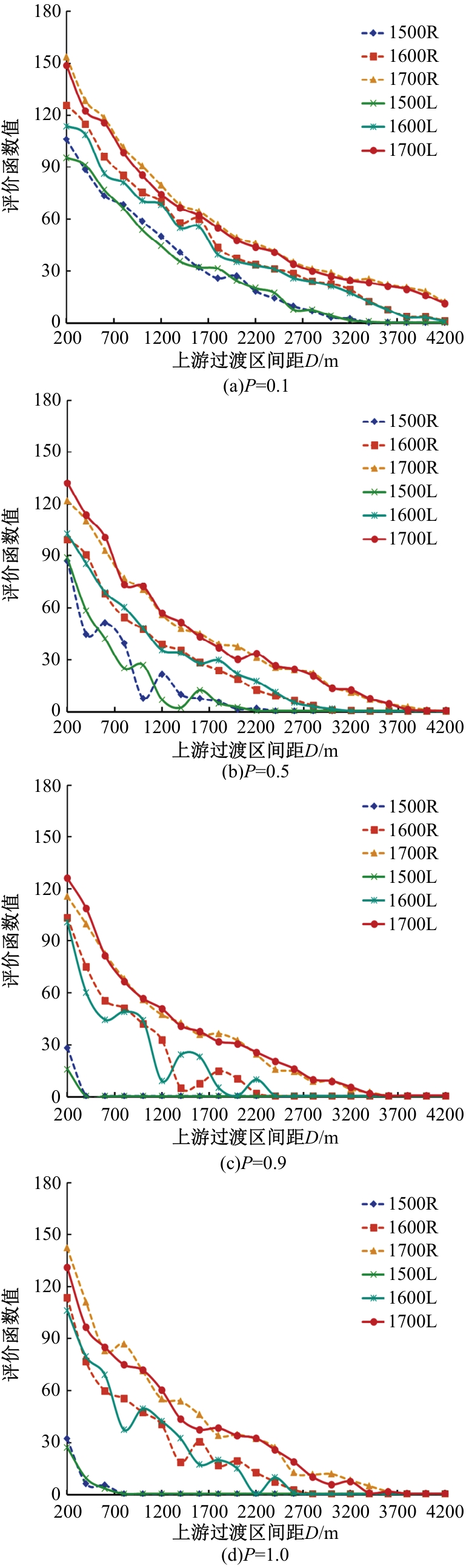
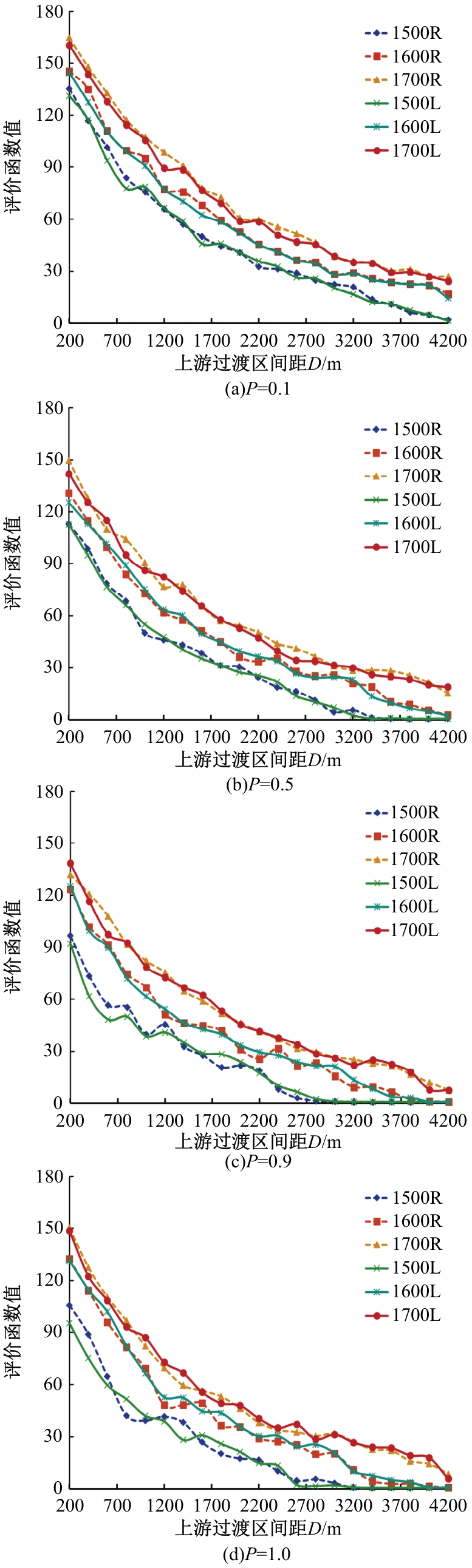
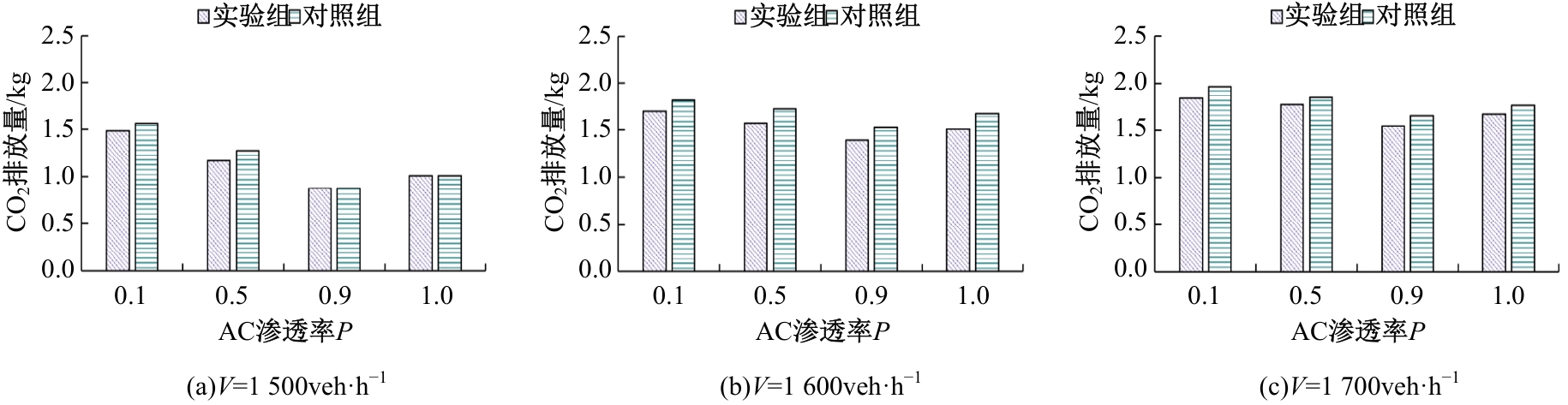
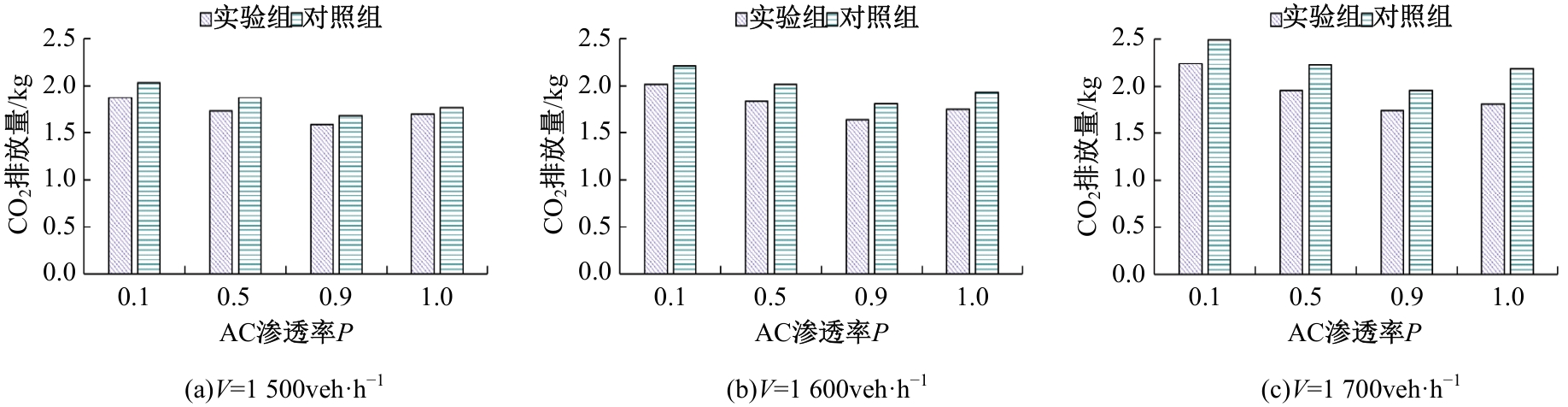
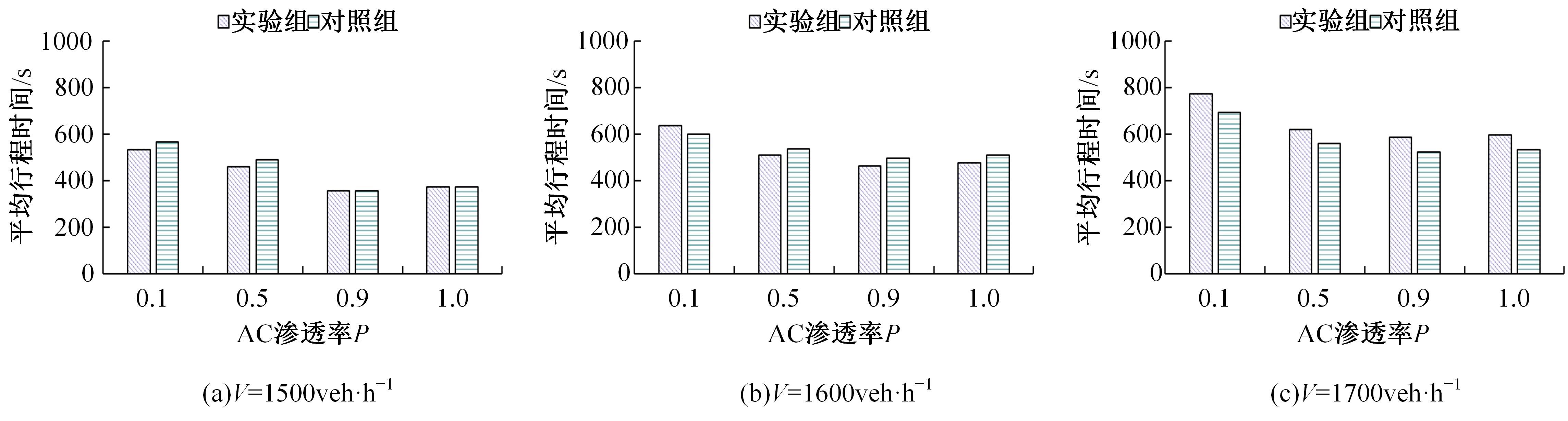
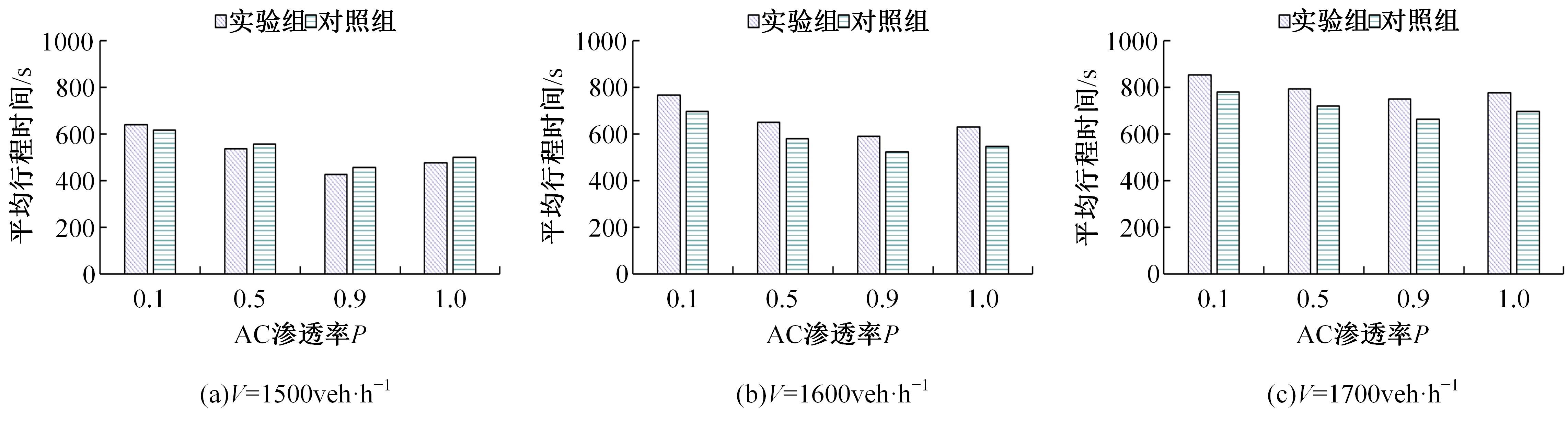
六车道高速公路封闭相邻两个车道时需设置两个上游过渡区,但现行规范并未规定两者间距的具体取值,考虑自动驾驶小客车(AC)的混入,研究该间距的取值问题。首先,定义警告区通行效率作为上游过渡区间距D的评价依据,构造动态综合评价函数,进行警告区通行效率分级;其次,通过SUMO软件建模,基于不同的交通条件,即不同的交通量V、人类驾驶大货车混入率T、AC渗透率P,进行D取不同值的模拟实验,分析警告区通行效率的变化规律;然后,基于通行效率分级,通过实验探讨D在不同交通条件下的取值范围;最后,分析D在不同交通条件下对施工区环境和通行效率的影响。模拟实验表明:D越大警告区通行效率越高,该变化是非线性的,提高幅度随D的增大而变缓;随着V或T升高,警告区通行效率降低,增大D才能保持其不变;随着P升高,警告区通行效率先升高后降低,存在一个最佳的P使其达到最大且D达到最小;相对于D取最小值,增大D能降低CO2排放量,在适当的交通条件下,能同时提高警告区通行效率和缩短平均行程时间。
中图分类号:
- U418

| [1] | Raj A, Kumar J A, Bansal P. A multicriteria decision making approach to study barriers to the adoption of autonomous vehicles[J]. Transportation Research Part A: Policy and Practice, 2020, 133: 122-137. |
| [2] | 孟祥海, 张龙钊, 李生龙. 四车道高速公路部分占用超车道交通控制区交通特性及通行能力研究[J]. 交通运输系统工程与信息, 2020, 20(2): 218-224. |
| Meng Xiang-hai, Zhang Long-zhao, Li Sheng-long. Traffic characteristics and capacity of overtaking lane partly occupied traffic control zone of four-lane freeway[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(2): 218-224. | |
| [3] | Algomaiah M, Li Z. Exploring work zone late merge strategies with and without enabling connected vehicles technologies[J]. Transportation Research Interdisciplinary Perspectives, 2021, 9(1): 100316. |
| [4] | 郝嘉田, 吴忠广, 田万利, 等. 高速公路改扩建中央分隔带开口长度通用计算模型构建与验证[J]. 交通运输系统工程与信息, 2023, 23(4): 262-269. |
| Hao Jia-tian, Wu Zhong-guang, Tian Wan-li, et al. Construction and validation of a general calculation model for the length of the median opening for expressway renovation and expansion project[J]. Journal of Transportation Systems Engineering and Information Technology, 2023, 23(4): 262-269. | |
| [5] | Zou H, Zhu S Y, Jiang R X, et al. Traffic conflicts in the lane-switching sections at highway reconstruction zones[J]. Journal of Safety Research, 2023, 84: 280-289. |
| [6] | 李晓虎, 麦乐, 任杰, 等. 高速公路施工区自动车辆行驶轨迹优化方法[J]. 交通信息与安全, 2020, 38(3): 40-47. |
| Li Xiao-hu, Le Mai, Ren Jie, et al. A trajectory optimization method of automatic vehicles at freeway work zone[J]. Journal of Transport Information and Safety, 2020, 38(3): 40-47. | |
| [7] | Abdulsattar H, Mostafizi A, Siam M R K, et al. Measuring the impacts of connected vehicles on travel time reliability in a work zone environment: an agent-based approach[J]. Journal of Intelligent Transportation Systems, 2020, 24: 421-436. |
| [8] | 陈玲娟, 张思琦, 马东方. 施工区混行车流跟驰及换道模型研究[J]. 交通运输系统工程与信息, 2021, 21(2): 58-64. |
| Chen Ling-juan, Zhang Si-qi, Ma Dong-fang. Car-following and lane-changing behavior of mixed traffic in work area[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(2): 58-64. | |
| [9] | Tajalli M, Niroumand R, Hajbabaie A. Distributed cooperative trajectory and lane changing optimization of connected automated vehicles: freeway segments with lane drop[J]. Transportation Research Part C: Emerging Technologies, 2022, 143: 103761. |
| [10] | 彭余华, 王晓玉, 吕纪娜, 等. 基于服务水平的高速公路养护作业工作区长度确定方法[J]. 中国公路学报, 2016, 29(5): 130-136. |
| Peng Yu-hua, Wang Xiao-yu, Lv Ji-na, et al. Length determination method for expressway maintenance work zone based on service level[J]. China Journal of Highway and Transport, 2016, 29(5): 130-136. | |
| [11] | 姚志洪, 金玉婷, 王思琛, 等. 混入智能网联汽车的交通流稳定性与安全性分析[J]. 中国安全科学学报, 2021, 31(10): 136-143. |
| Yao Zhi-hong, Jin Yu-ting, Wang Si-chen, et al. Stability and safety analysis on traffic flow mixed with ICV[J]. China Safety Science Journal, 2021, 31(10): 136-143. | |
| [12] | Wang L C, Yang M, Li Y, et al. A model of lane-changing intention induced by deceleration frequency in an automatic driving environment[J]. Physica A: Statistical Mechanics and its Applications, 2022, 604:127905. |
| [13] | Li T N, Chen D J, Zhou H, et al. Car-following behavior characteristics of adaptive cruise control vehicles based on empirical experiments[J]. Transportation Research Part B, 2021, 147: 67-91. |
| [14] | 崔居福, 胡本旭, 夏辉, 等. SUMO平台下多种车辆跟驰模型的仿真对比分析[J]. 重庆大学学报, 2021, 44(7): 43-54. |
| Cui Ju-fu, Hu Ben-xu, Xia Hui, et al. Comparative analysis of simulation of multi-car-following models under SUMO platform[J]. Journal of Chongqing University, 2021, 44(7): 43-54. | |
| [15] | 梁国华, 石权, 李瑞, 等. 高速公路合流区主要参数对自动驾驶车辆的影响[J]. 哈尔滨工业大学学报, 2021, 53(9): 62-68. |
| Liang Guo-hua, Shi Quan, Li Rui, et al. Impact of main parameters of merging area in highway on autonomous vehicles[J]. Journal of Harbin Institute of Technology, 2021, 53(9): 62-68. | |
| [16] | 何巍楠, 刘莹, 孙胜阳, 等. 基于HBEFA的城市交通温室气体排放模型——以北京本地化建模为例[J]. 交通运输系统工程与信息, 2014, 14(4): 222-229. |
| He Wei-nan, Liu Ying, Sun Sheng-yang, et al. Greenhouse gas emissions model for urban transportation based on HBEFA——the case of beijing localization model[J]. Journal of Transportation Systems Engineering and Information Technology, 2014, 14(4): 222-229. | |
| [17] | 杨柳, 王创业, 王梦言, 等. 设置自动驾驶小客车专用车道的六车道高速公路交通流特性[J]. 吉林大学学报: 工学版, 2023, 53(7): 2043-2052. |
| Yang Liu, Wang Chuang-ye, Wang Meng-yan, et al. Traffic flow characteristics of six-lane freeways with a dedicated lane for automatic cars[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(7): 2043-2052. | |
| [18] | 蔺庆海, 何兆成, 谢俊,等. 基于AVI数据与深度强化学习的城市快速路匝道协调控制方法[J]. 中国公路学报, 2023, 36(10): 224-237. |
| Lin Qing-hai, He Zhao-cheng, Xie Jun, et al. Urban expressway coordinated ramp metering approach using automatic vehicle identification data and deep reinforcement learning[J]. China Journal of Highway and Transport, 2023, 36(10): 224-237. |
| [1] | 张毅,陈莎雯,陈艳,范翔宇,王思祺,吴欢,焦鹏飞. 高速公路机电设备动态运维评价及预测性维护[J]. 吉林大学学报(工学版), 2026, 56(1): 170-182. |
| [2] | 李博,梁媛,马云东,于露. 寒区高铁隧道口边坡冻融失稳智能监测预警方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2985-2997. |
| [3] | 于征磊,张超磊,陈立新,胡平,徐涛,郭滨恺. 高速公路声屏障板仿生结构设计及声学力学性能[J]. 吉林大学学报(工学版), 2025, 55(9): 3079-3088. |
| [4] | 张航,孙煜,马宝林,牛世豪,王星月,吕能超. 高速公路双车道出口辅助车道长度可靠性设计[J]. 吉林大学学报(工学版), 2025, 55(8): 2611-2618. |
| [5] | 徐凌,王小兵,袁捷,任华平,韩乙锋,徐西永. 回填狭窄区粉砂基可控低强度材料制备与性能[J]. 吉林大学学报(工学版), 2025, 55(8): 2657-2668. |
| [6] | 田耀刚,蒋静,赵成,杨小敏,张军,贾侃. 水性环氧树脂改性高早强砂浆的耐温机制[J]. 吉林大学学报(工学版), 2025, 55(7): 2203-2211. |
| [7] | 姚康,董侨,陈雪琴,史斌,颜世傲,王翔. 基于相场正则化黏聚区模型的混凝土混合型细观断裂行为[J]. 吉林大学学报(工学版), 2025, 55(7): 2286-2297. |
| [8] | 葛洪成,郭忠印,宋灿灿,王世伟. 半地下枢纽互通匝道隧道出口与二次分流点间安全距离[J]. 吉林大学学报(工学版), 2025, 55(7): 2223-2232. |
| [9] | 龙志友,万昭龙,董是,杨超,刘肖扬. 基于变分模态分解和极端梯度提升的公路边坡位移预测[J]. 吉林大学学报(工学版), 2025, 55(7): 2320-2332. |
| [10] | 韦万峰,张洪刚,张仰鹏,杨帆,唐伯明,孔令云. 废胶粉改性沥青改性机理、制备及性能研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1834-1853. |
| [11] | 杨轸,郑瑞平,巩喆. 路网道路服役性能和交通状态耦合仿真预测[J]. 吉林大学学报(工学版), 2025, 55(6): 1973-1983. |
| [12] | 徐慧智,郝东升,徐小婷,蒋时森. 基于深度学习的高速公路小目标检测算法[J]. 吉林大学学报(工学版), 2025, 55(6): 2003-2014. |
| [13] | 张安顺,付伟,张军辉,高峰. 长沙压实黏土剪切特性及应力-应变关系表征[J]. 吉林大学学报(工学版), 2025, 55(5): 1604-1616. |
| [14] | 孟祥海,王国锐,张明扬,田毕江. 基于选择集成的山区高速事故预测模型[J]. 吉林大学学报(工学版), 2025, 55(4): 1298-1306. |
| [15] | 王黎明,宋子坤,周辉,魏文,袁浩. 超声处置石油沥青的流变学响应及响应机理[J]. 吉林大学学报(工学版), 2025, 55(4): 1346-1355. |
|
||