吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (8): 2703-2710.doi: 10.13229/j.cnki.jdxbgxb.20231190
基于中心选择大逃杀优化算法的机器人逆运动学求解
张宇飞1,2( ),王丽敏3(),赵建平2,贾智尧3,李明洋4
),王丽敏3(),赵建平2,贾智尧3,李明洋4
- 1.长春大学 计算机科学技术学院,长春 130022
2.长春理工大学 计算机科学技术学院,长春 130022
3.广东财经大学 信息学院,广州 510320
4.长春工业大学 经济管理学院,长春 130012
Robot inverse kinematics solution based on center selection battle royale optimization algorithm
Yu-fei ZHANG1,2(),Li-min WANG3(),Jian-ping ZHAO2,Zhi-yao JIA3,Ming-yang LI4
- 1.College of Computer Science and Technology,Changchun University,Changchun 130022,China
2.School of Computer Science and Technology,Changchun University of Science and Technology,Changchun 130022,China
3.School of Information,Guangdong University of Finance and Economics,Guangzhou 510320,China
4.School of Economics and Management,Changchun University of Technology,Changchun 130012,China
摘要:
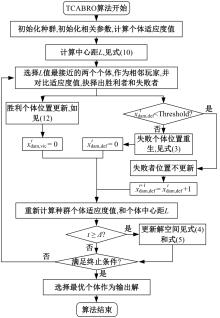
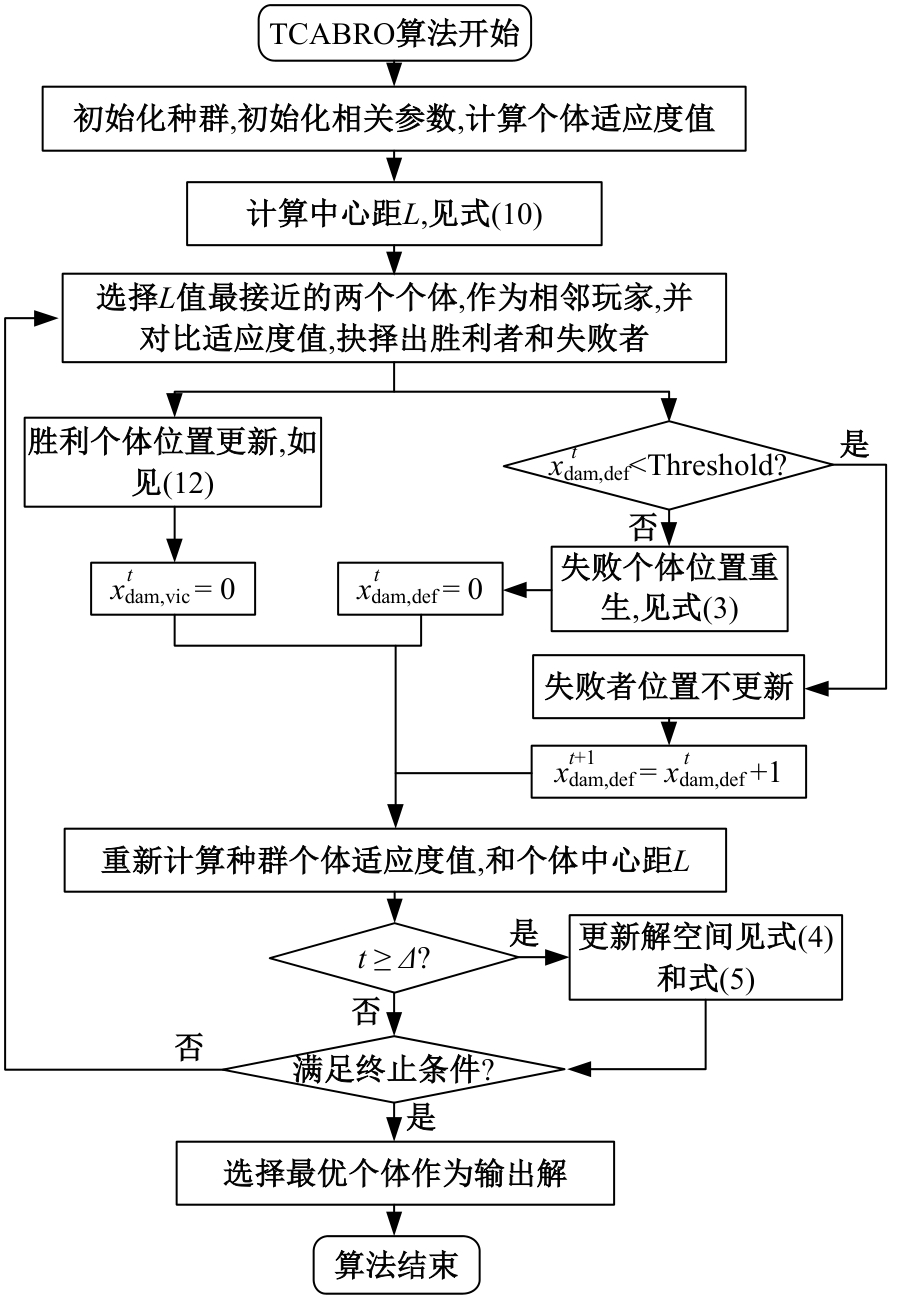
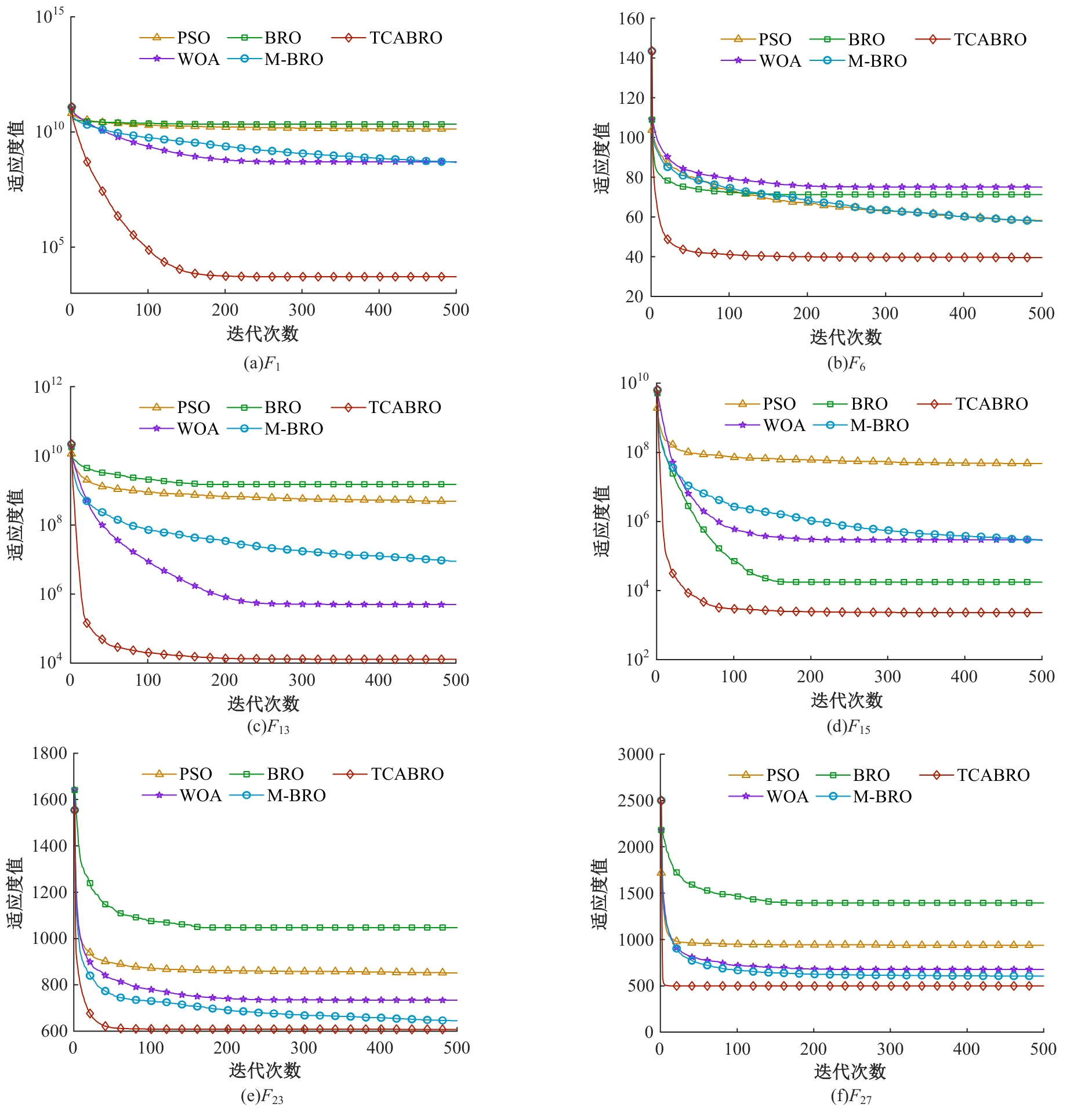
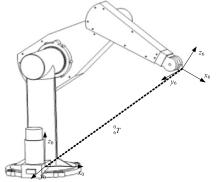
为解决大逃杀优化算法时间复杂度高和全局探索能力不足的问题,提出了一种基于混沌映射、中心选择和精英自适应策略的改进大逃杀优化算法。与粒子群优化算法、鲸鱼优化算法和大逃杀优化算法在基准函数上的测试结果相比,改进大逃杀优化算法的时间复杂度明显降低,收敛精度、速度和稳定性显著提高。在求解机器人逆运动学问题的应用中,改进大逃杀优化算法的求解精度和稳定性优于传统大逃杀优化算法,证明了其在解决机器人逆运动学问题上的实用性和发展潜力。
中图分类号:
- TP301.6

| [1] | Kong Y, Song S, Zhang N, et al. Design and kinematic modeling of in-situ torsionally-steerable flexible surgical robots[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1864-1871. |
| [2] | Li J, Yu H, Shen N, et al. A novel inverse kinematics method for 6-DOF robots with non-spherical wrist[J]. Mechanism and Machine Theory, 2021, 157: 104180. |
| [3] | Starke S, Hendrich N, Zhang J. Memetic evolution for generic full-body inverse kinematics in robotics and animation[J]. IEEE Transactions on Evolutionary Computation, 2019, 23(3): 406-420. |
| [4] | Rahkar F T. Battle royale optimization algorithm[J]. Neural Computing and Applications, 2021, 33(4): 1139-1157. |
| [5] | Wu H, Zhang X, Song L, et al. A hybrid improved BRO algorithm and its application in inverse kinematics of 7R 6DOF robot[J]. Advances in Mechanical Engineering, 2022, 14(3): 16878132221085125. |
| [6] | Alamgir F M, Alam M S. A novel deep learning-based bidirectional elman neural network for facial emotion recognition[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2022, 36(10): 2252016. |
| [7] | Karamnejadi A K, Kakouee A, Mollajafari M, et al. Developed design of battle royale optimizer for the optimum identification of solid oxide fuel cell[J]. Sustainability, 2022, 14(16): 14169882. |
| [8] | Akan T, Agahian S, Dehkharghani R. Battle royale optimizer for solving binary optimization problems[J]. Software Impacts, 2022, 12: 100274. |
| [9] | Akan S, Akan T. Battle royale optimizer with a new movement strategy[J]. Handbook of Nature-Inspired Optimization Algorithms, 2022, 9: 265-279. |
| [10] | 国强, 朱国会, 李万臣. 基于混沌麻雀搜索算法的TDOA/FDOA定位[J]. 吉林大学学报: 工学版, 2023, 53(2): 593-600. |
| Guo Qiang, Zhu Guo-hui, Li Wan-chen. TDOA/FDOA localization based on chaotic sparrow search algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(2): 593-600. | |
| [11] | Wu G, Mallipeddi R, Suganthan P. Problem definitions and evaluation criteria for the CEC 2017 competition on constrained real-parameter optimization[R]. Changsha: National University of Defense Technology, 2017. |
| [12] | Kennedy J, Eberhart R. Particle swarm optimization[C]∥Proceedings of IEEE International Conference on Neural Networks. Perth: IEEE, 1995: 1942-1948. |
| [13] | Mirjalili S, Lewis A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| [14] | Elsherbiny A, Elhosseini M A, Haikal A Y. A new ABC variant for solving inverse kinematics problem in 5 DOF robot arm[J]. Applied Soft Computing, 2018, 73: 24-38. |
| [15] | Lv X, Zhao M. Application of improved BQGA in robot kinematics inverse solution[J]. Journal of Robotics, 2019, 2019: 1659180. |
| [1] | 李文辉,杨晨. 基于对比学习文本感知的小样本遥感图像分类[J]. 吉林大学学报(工学版), 2025, 55(7): 2393-2401. |
| [2] | 车翔玖,李良. 融合全局与局部细粒度特征的图相似度度量算法[J]. 吉林大学学报(工学版), 2025, 55(7): 2365-2371. |
| [3] | 车翔玖,孙雨鹏. 基于相似度随机游走聚合的图节点分类算法[J]. 吉林大学学报(工学版), 2025, 55(6): 2069-2075. |
| [4] | 周丰丰,郭喆,范雨思. 面向不平衡多组学癌症数据的特征表征算法[J]. 吉林大学学报(工学版), 2025, 55(6): 2089-2096. |
| [5] | 王健,贾晨威. 面向智能网联车辆的轨迹预测模型[J]. 吉林大学学报(工学版), 2025, 55(6): 1963-1972. |
| [6] | 胡云峰,李佳敏,唐志国. 移动装弹机械臂的逆运动学多种群灰狼算法求解方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1443-1452. |
| [7] | 车翔玖,武宇宁,刘全乐. 基于因果特征学习的有权同构图分类算法[J]. 吉林大学学报(工学版), 2025, 55(2): 681-686. |
| [8] | 梁礼明,周珑颂,尹江,盛校棋. 融合多尺度Transformer的皮肤病变分割算法[J]. 吉林大学学报(工学版), 2024, 54(4): 1086-1098. |
| [9] | 拉巴顿珠,扎西多吉,珠杰. 藏语文本标准化方法[J]. 吉林大学学报(工学版), 2024, 54(12): 3577-3588. |
| [10] | 叶育鑫,夏珞珈,孙铭会. 增强现实环境中基于假想键盘的手势输入方法[J]. 吉林大学学报(工学版), 2024, 54(11): 3274-3282. |
| [11] | 车娜,朱奕明,赵剑,孙磊,史丽娟,曾现伟. 基于联结主义的视听语音识别方法[J]. 吉林大学学报(工学版), 2024, 54(10): 2984-2993. |
| [12] | 薛珊,张亚亮,吕琼莹,曹国华. 复杂背景下的反无人机系统目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 891-901. |
| [13] | 时小虎,吴佳琦,吴春国,程石,翁小辉,常志勇. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. |
| [14] | 张铮,朱齐丹,吕晓龙,樊星. 冗余机械臂运动学逆解的求解优化方法[J]. 吉林大学学报(工学版), 2023, 53(12): 3379-3387. |
| [15] | 王振,杨宵晗,吴楠楠,李国坤,冯创. 基于生成对抗网络的序列交叉熵哈希[J]. 吉林大学学报(工学版), 2023, 53(12): 3536-3546. |
|