吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (8): 2802-2816.doi: 10.13229/j.cnki.jdxbgxb.20231236
• 通信与控制工程 • 上一篇
基于自适应采样的智能车辆轨迹规划方法
赵俊武1( ),曲婷1,2,胡云峰1,3()
),曲婷1,2,胡云峰1,3()
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130025
2.吉林大学 重庆研究院,重庆 401120
3.吉林大学 通信工程学院,长春 130012
Trajectory planning for intelligent vehicles based on adaptive sampling
Jun-wu ZHAO1(),Ting QU1,2,Yun-feng HU1,3()
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130025,China
2.Chongqing Research Institute,Jilin University,Chongqing 401120,China
3.College of Communication Engineering,Jilin University,Changchun 130012,China
摘要:
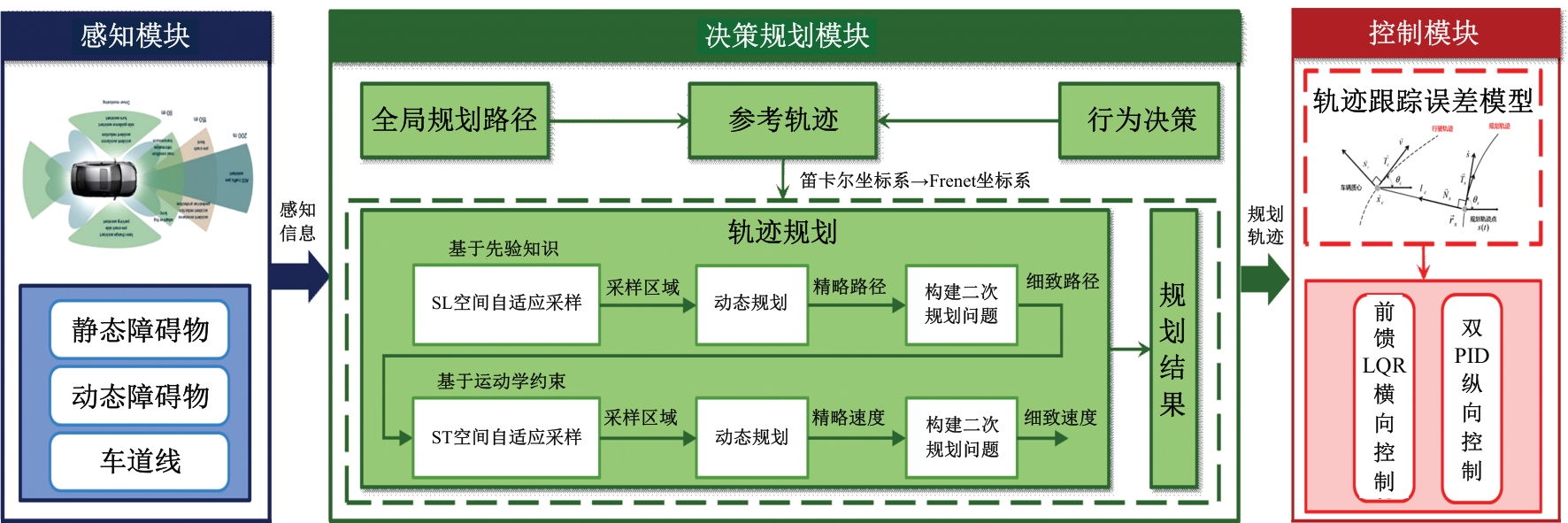
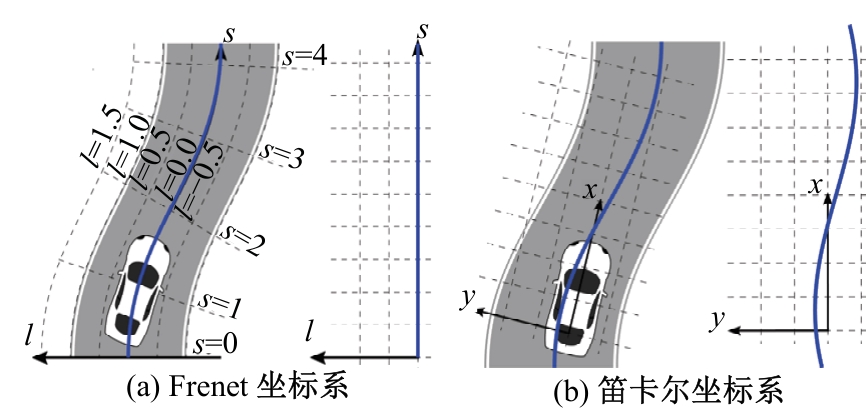
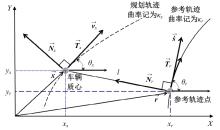
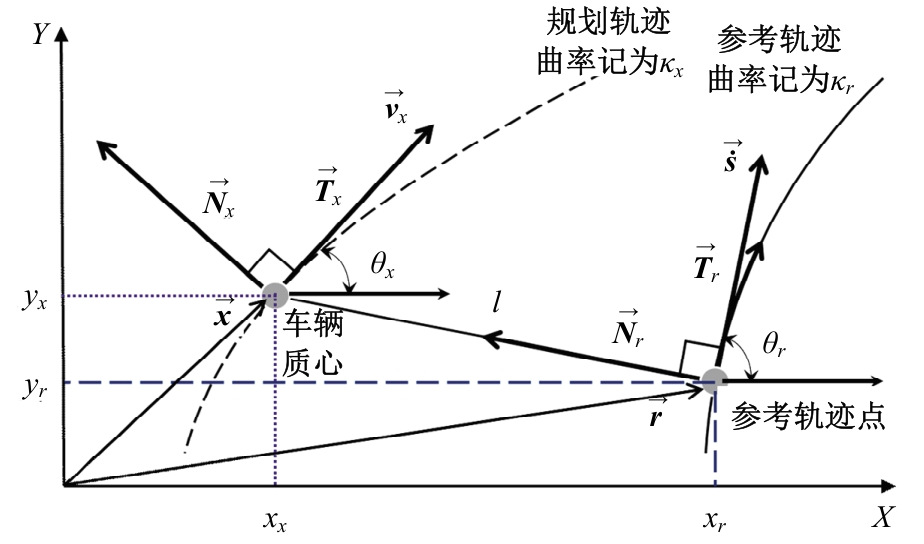
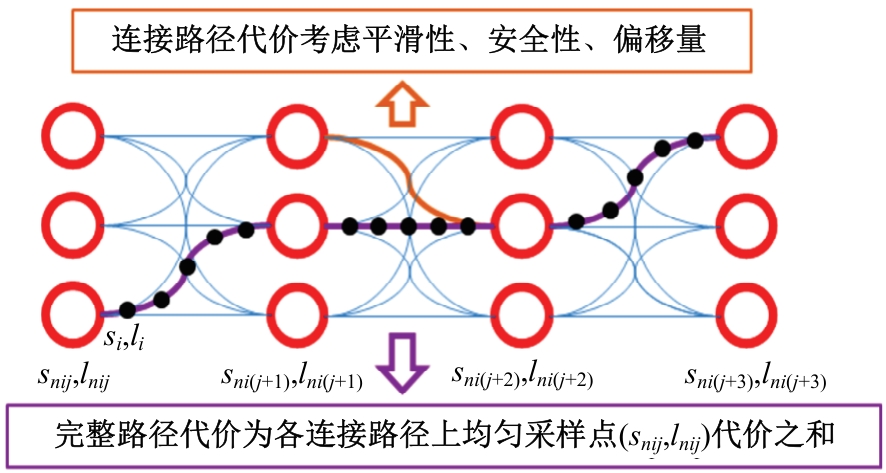
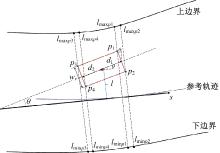
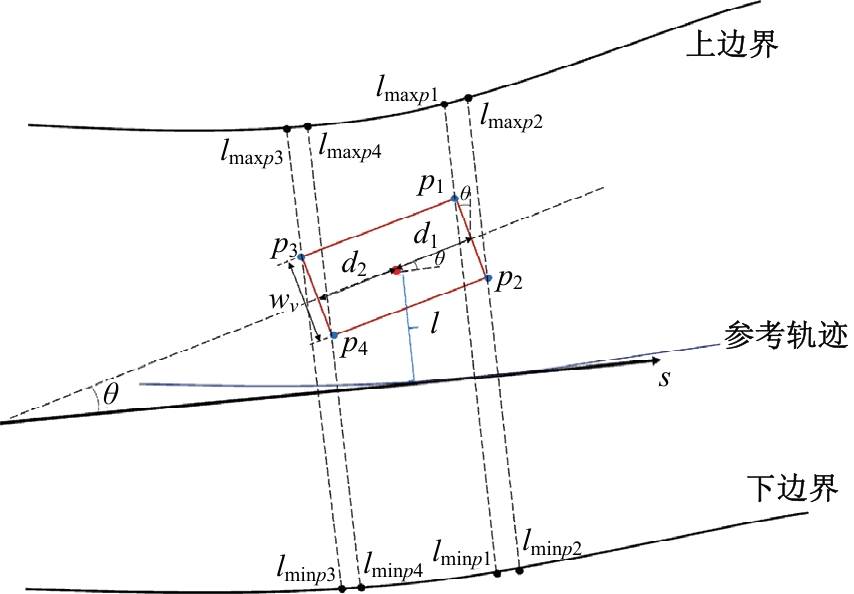
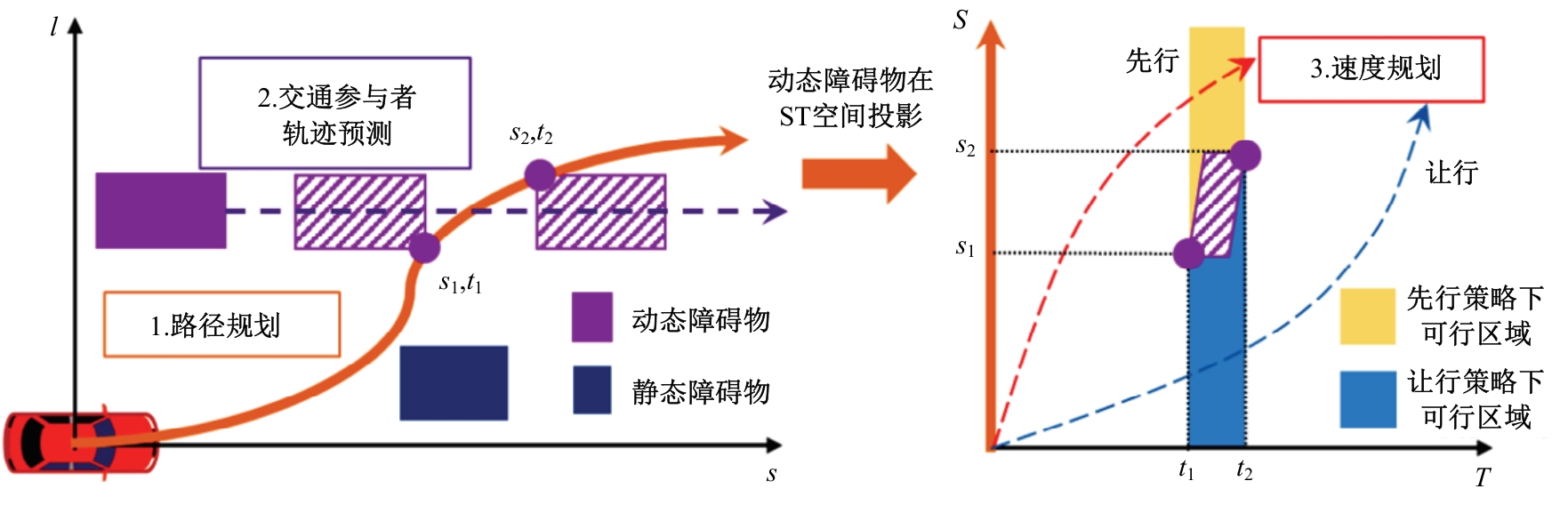
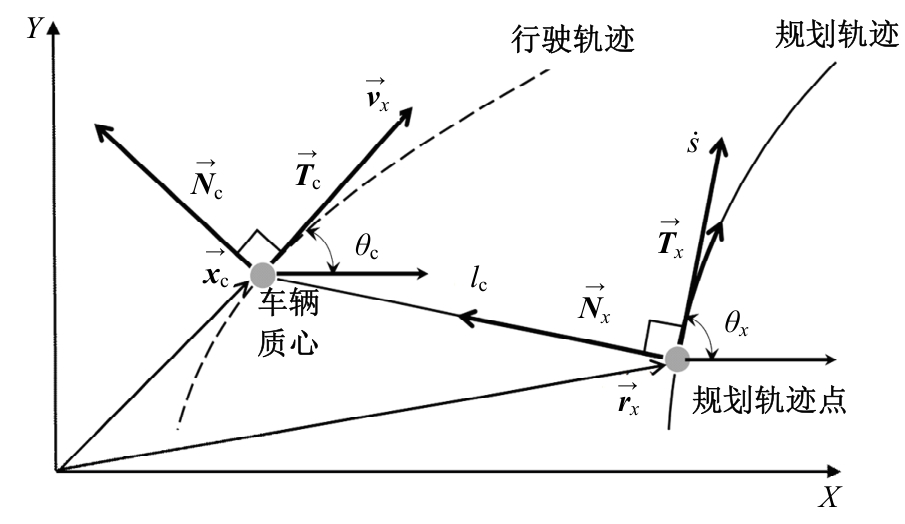
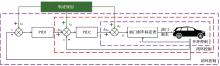
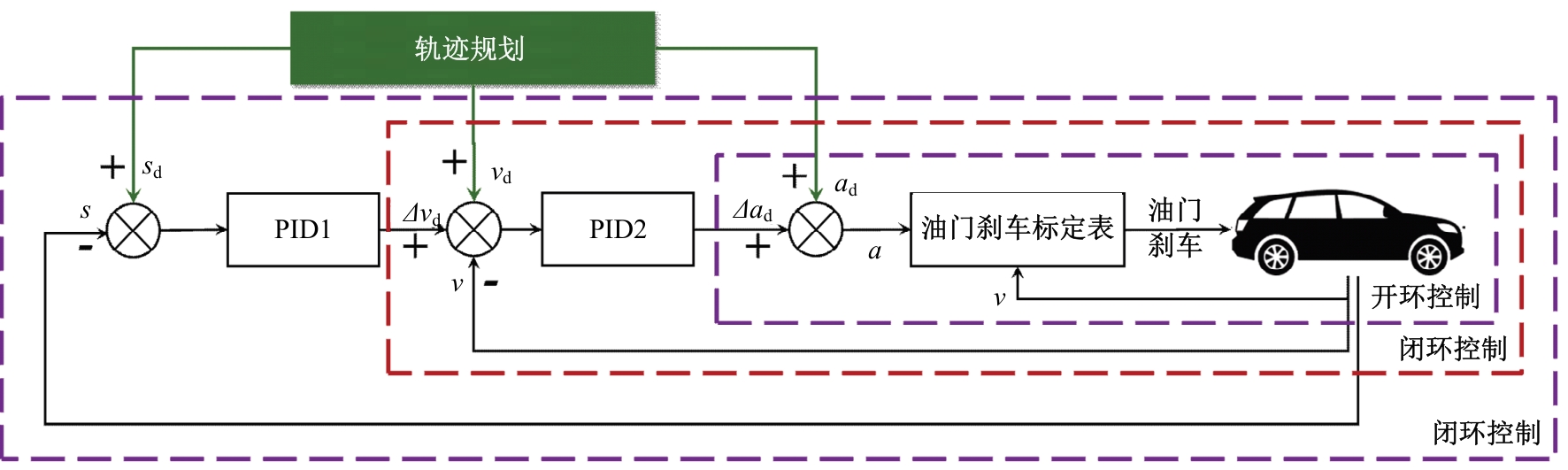
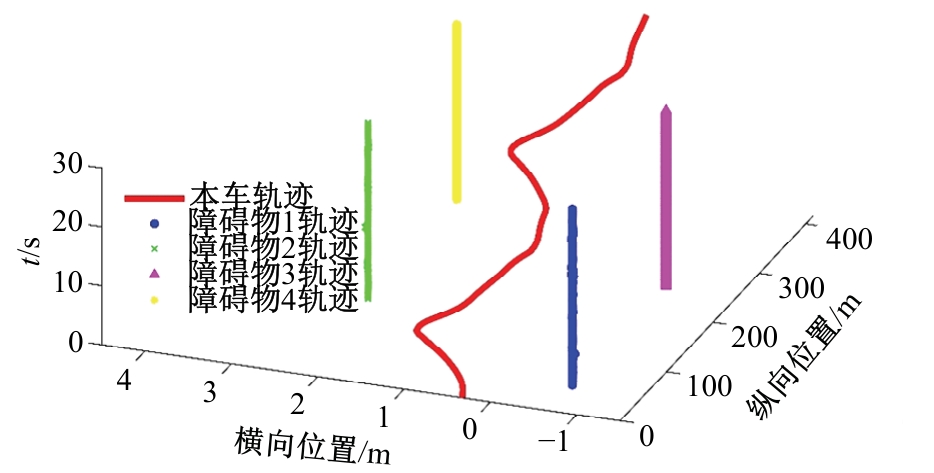
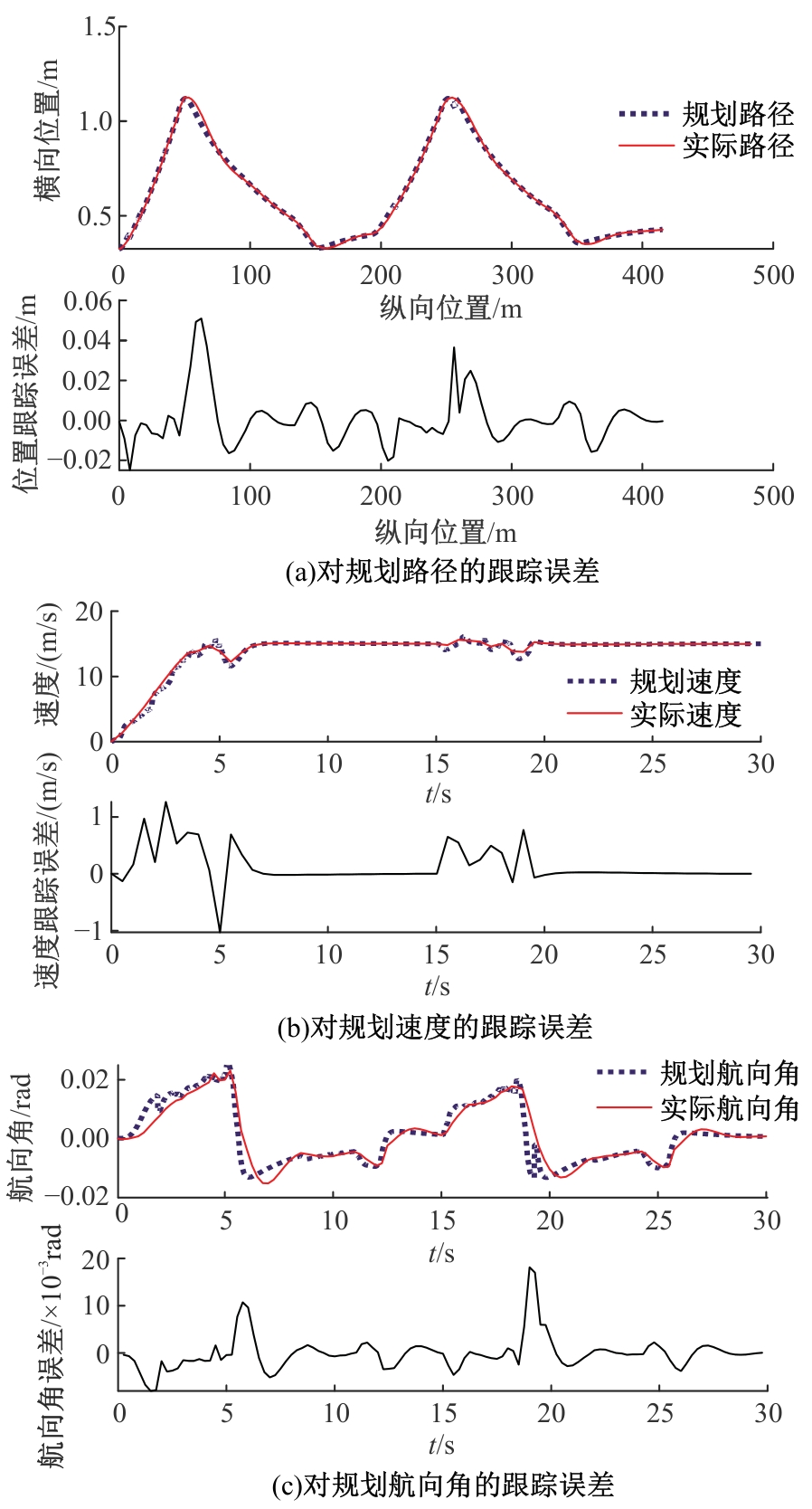
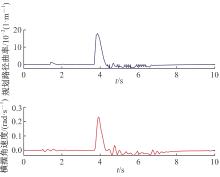
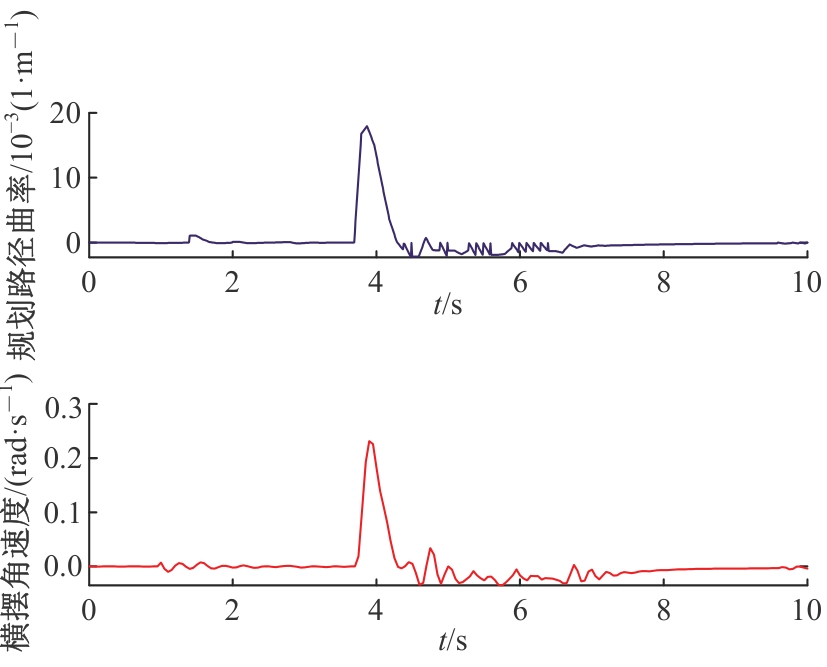
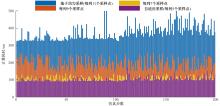
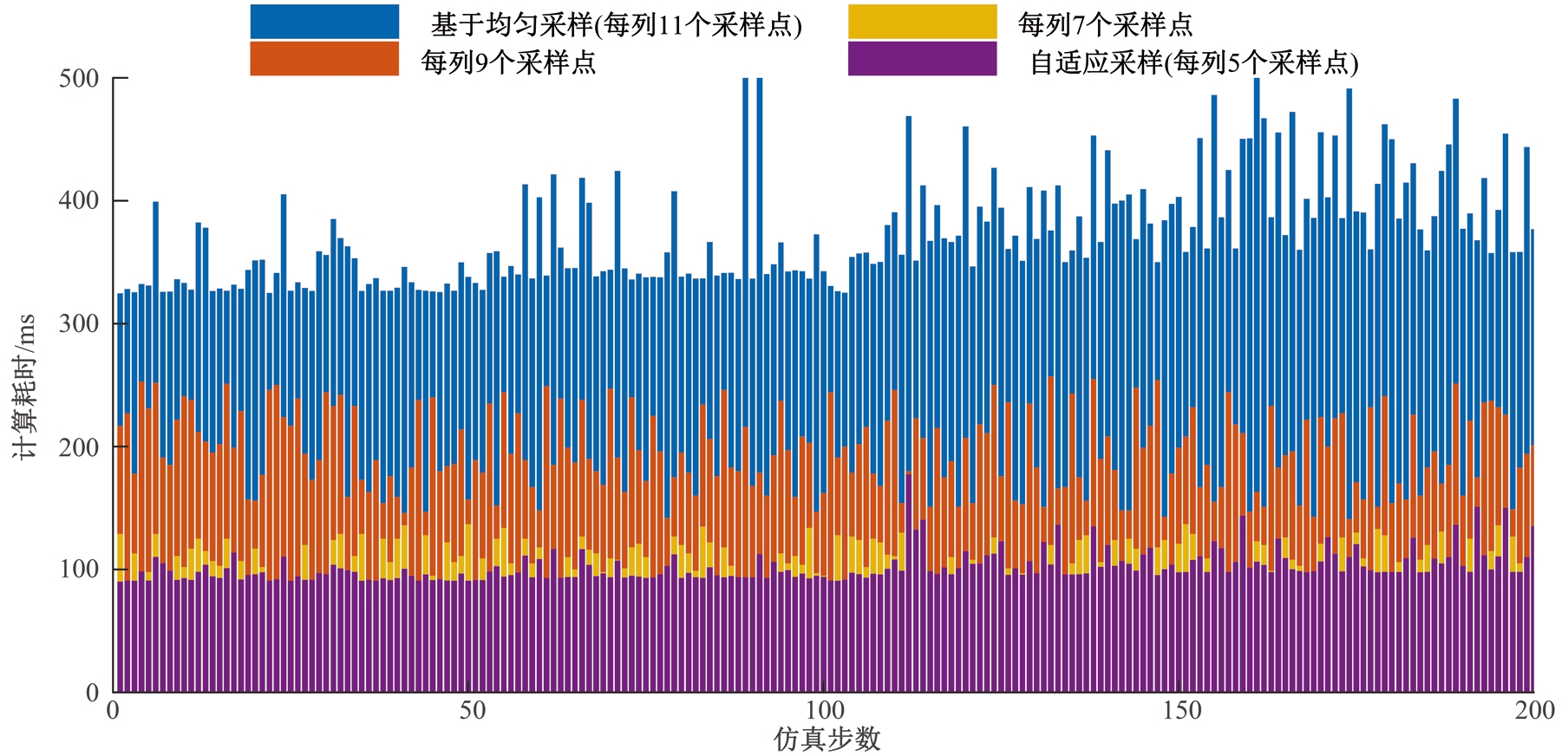
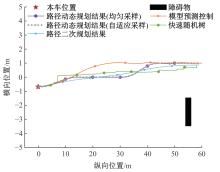
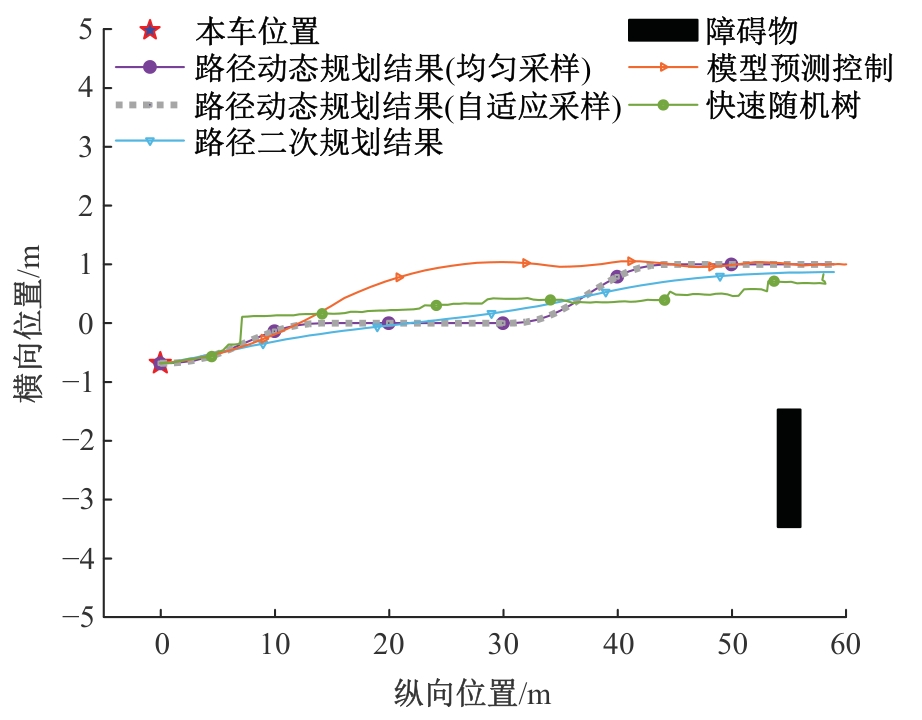
针对在三维空间(X-Y-T)进行智能车辆轨迹规划时计算复杂度高、耗时长的问题,本文提出了一种基于自适应采样的双层三阶段轨迹规划方法,基于Frenet坐标系把三维轨迹规划问题分解为路径规划和速度规划2个二维优化问题。首先,在路径规划方面,引入基于人工势场的自适应采样方法,以减少路径规划空间采样点数量,采用动态规划计算连接各采样点综合代价最低的路径曲线,构建二次规划问题进一步优化此路径,得到最终规划路径。其次,在速度规划方面,根据运动学约束确定速度规划空间自适应采样区域,使用动态规划方法计算连接各采样点综合代价最低的速度曲线,并依据此曲线构建二次规划问题,求解得到最终速度规划结果。最后,构建轨迹跟踪误差模型,设计横、纵向控制器对规划轨迹可跟踪性进行验证。仿真结果表明,本文所提方法能够将单次规划耗时降低至0.1 s左右,为智能车辆提供了更新频率为10 Hz的规划轨迹,实现了规划与控制的协同。
中图分类号:
- U270.1






| [1] | Qureshi K N, Abdullah A H. A survey on intelligent transportation systems[J]. Middle-East Journal of Scientific Research, 2013, 15(5): 629-642. |
| [2] | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| Xiong Lu, Yang Xing, Zhuo Gui-rong, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engneering, 2020, 56(10): 127-143. | |
| [3] | 彭浩楠, 唐明环, 查奇文, 等. 自动驾驶汽车双车道换道最优轨迹规划方法[J]. 吉林大学学报: 工学版, 2022, 52(12): 2852-2863. |
| Peng Hao-nan, Tang Ming-huan, Zha Qi-wen, et al. Optimization-based lane changing trajectory planning approach for autonomous vehicles on two-lane road[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(12): 2852-2863. | |
| [4] | 张利鹏, 苏泰, 严勇. 基于采样区域优化的智能车辆轨迹规划方法[J]. 机械工程学报, 2022, 58(14): 276-287. |
| Zhang Li-peng, Su Tai, Yan Yong. Trajectory planning method of intelligent vehicle based on sampling area optimization[J]. Journal of Mechanical Engneering, 2022, 58(14): 276-287. | |
| [5] | 张一鸣, 周兵, 吴晓建, 等. 基于前车轨迹预测的高速智能车运动规划[J]. 汽车工程, 2020, 42(5): 574-580. |
| Zhang Yi-ming, Zhou Bin, Wu Xiao-jian, et al. Motion planning of high speed intelligent vehicle based on front vehicle trajectory prediction[J]. Automotive Engineering, 2020, 42(5): 574-580. | |
| [6] | Chen L, Qin D F, Xu X, et al. A path and velocity planning method for lane changing collision avoidance of intelligent vehicle based on cubic 3-D Bezier curve[J]. Advances in Engineering Software, 2019, 132: 65-73. |
| [7] | Werling M, Kammel S, Ziegler J, et al. Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J]. The International Journal of Robotics Research, 2012, 31(3): 346-359. |
| [8] | 余卓平, 李奕姗, 熊璐. 无人车运动规划算法综述[J]. 同济大学学报: 自然科学版, 2017, 45(8): 1150-1159. |
| Yu Zhuo-ping, Li Yi-shan, Xiong Lu. A review of the motion planning problem of autonomous vehicle[J]. Journal of Tongji University (Natural Science), 2017, 45(8): 1150-1159. | |
| [9] | Fan H Y, Fan Z, Liu C C, et al. Baidu apollo EM motion planner[J]. Arxiv Preprint, 2018, 9: No.180708048. |
| [10] | Lim W, Lee S, Sunwoo M, et al. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(2): 613-626. |
| [11] | 唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报: 自然科学版, 2018, 40(6): 174-182. |
| Tang Zhi-rong, Ji Jie, Wu Ming-yang, et al. Vehicle path planning and tracking based on improved artificial potential field method[J]. Journal of Southwest University (Natural Science Edition), 2018, 40(6): 174-182. | |
| [12] | Lu B, Li G F, Yu H L, et al. Adaptive potential field-based path planning for complex autonomous driving scenarios[J]. IEEE Access, 2020, 8: 225294-225305. |
| [13] | Liu Z X, Yuan X F, Huang G M, et al. Two potential fields fused adaptive path planning system for autonomous vehicle under different velocities[J]. ISA Transactions, 2021, 112: 176-185. |
| [14] | Qu T, Chen H, Cao D P, et al. Switching-based stochastic model predictive control approach for modeling driver steering skill[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 16(1): 365-375. |
| [15] | 许芳, 张君明, 胡云峰, 等. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报: 工学版, 2021, 51(6): 2287-2294. |
| Xu Fang, Zhang Jun-ming, Hu Yun-feng, et al. Lateral and longitudinal coupling real-time predictive controller for intelligent vehicle path tracking[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(6): 2287-2294. | |
| [16] | Qu T, Zhao J W, Gao H H, et al. Multi-mode switching-based model predictive control approach for longitudinal autonomous driving with acceleration estimation[J]. IET Intelligent Transport Systems, 2020, 14(14): 2102-2112. |
| [17] | Hang P, Lv C, Xing Y, et al. Human-like decision making for autonomous driving: a noncooperative game theoretic approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(4): 2076-2087. |
| [18] | Polack P, Altché F, Andréa N B, et al. Guaranteeing consistency in a motion planning and control architecture using a kinematic bicycle model[C]∥Proceeding of the 2018 Annual American Control Conference (ACC). Piscataway, N J: IEEE, 2018: 3981-3987. |
| [19] | Mouhagir H, Talj R, Cherfaoui V, et al. Evidential-based approach for trajectory planning with tentacles, for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(8): 3485-3496. |
| [20] | Ji J L, Yang T K, Xu C, et al. Real-time trajectory planning for aerial perching[C]∥Proceeding of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, N J:IEEE, 2022: 10516-10522. |
| [1] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [2] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [3] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [4] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [5] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [6] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [7] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [8] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
| [9] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
| [10] | 卢荡,王晓凡,吴海东. TWEEL轮胎接地压力均布特性分析[J]. 吉林大学学报(工学版), 2025, 55(3): 811-819. |
| [11] | 陈鑫,张祥源,武子涛,于贵申,杨立飞. 工艺顺序对车用铝薄板胶-PFSSW接头拉剪性能的影响[J]. 吉林大学学报(工学版), 2025, 55(2): 468-475. |
| [12] | 朱冰,范天昕,赵文博,李伟男,张培兴. 自动驾驶汽车连续测试场景复杂度评估方法[J]. 吉林大学学报(工学版), 2025, 55(2): 456-467. |
| [13] | 曲俊龙,史文库,玄圣夷,陈志勇. 面向汽车传动系统多挡共振的多级吸振器参数设计方法[J]. 吉林大学学报(工学版), 2025, 55(2): 444-455. |
| [14] | 王军年,曹宇靖,罗智仁,李凯旋,赵文伯,孟盈邑. 基于双目视觉的道路水深在线检测算法[J]. 吉林大学学报(工学版), 2025, 55(1): 175-184. |
| [15] | 胡宏宇,张争光,曲优,蔡沐雨,高菲,高镇海. 基于双分支和可变形卷积网络的驾驶员行为识别方法[J]. 吉林大学学报(工学版), 2025, 55(1): 93-104. |
|
||