吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (5): 1420-1427.doi: 10.13229/j.cnki.jdxbgxb20180673
• • 上一篇
基于联合概率数据关联的车用多传感器目标跟踪融合算法
王鹏宇1( ),赵世杰1,马天飞1(),熊晓勇1,程馨2
),赵世杰1,马天飞1(),熊晓勇1,程馨2
- 1. 吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2. 哈尔滨工业大学(威海) 信息科学与工程学院,山东 威海 264209
Vehicle multi-sensor target tracking and fusion algorithm based on joint probabilistic data association
Peng-yu WANG1(),Shi-jie ZHAO1,Tian-fei MA1(),Xiao-yong XIONG1,Xin CHENG2
- 1. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China
2. School of Information Science and Engineering, Harbin Institute of Technology in Weihai, Weihai 264209, China
摘要:
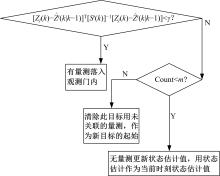
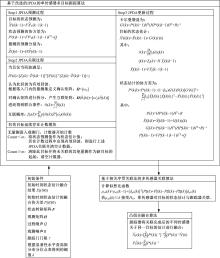
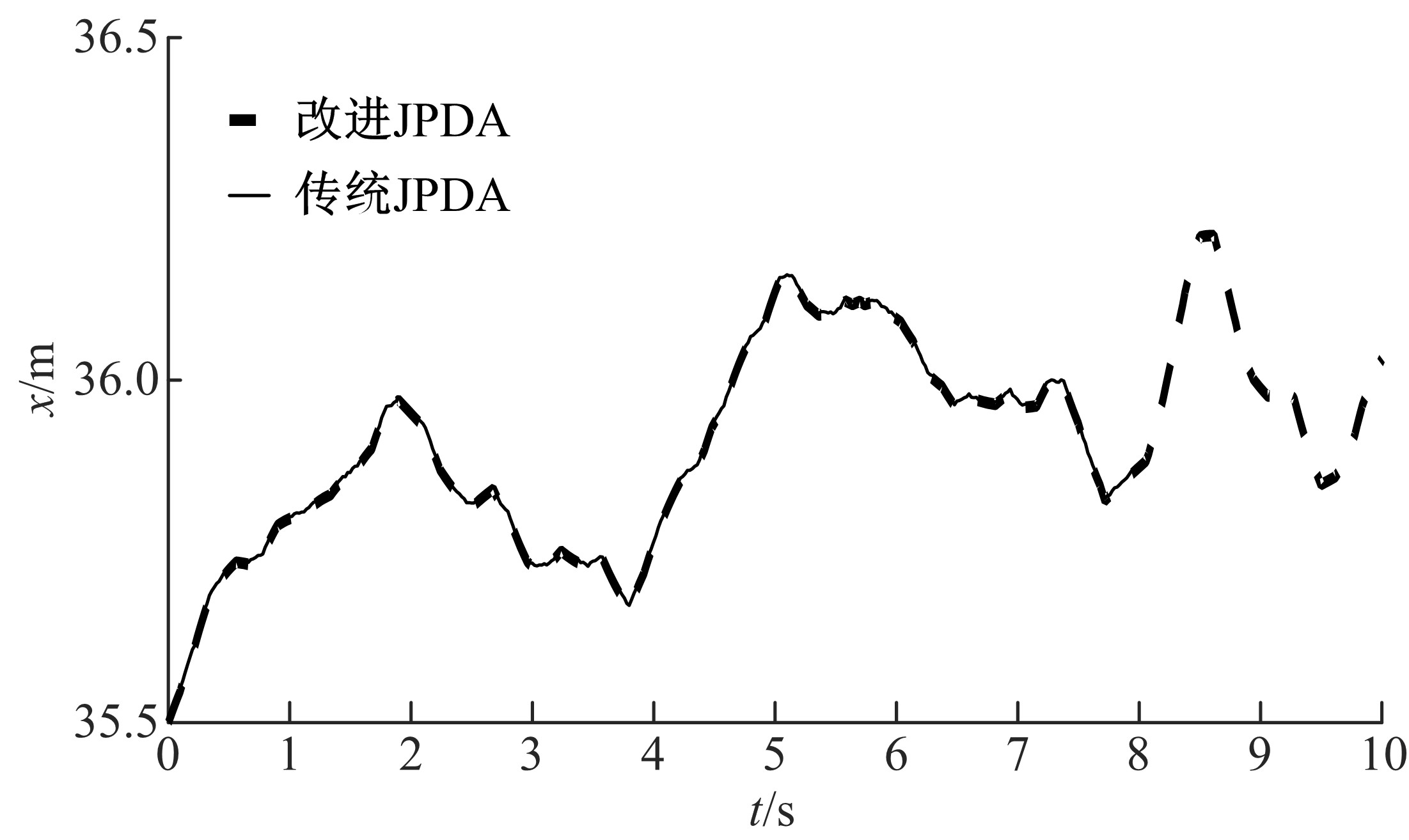
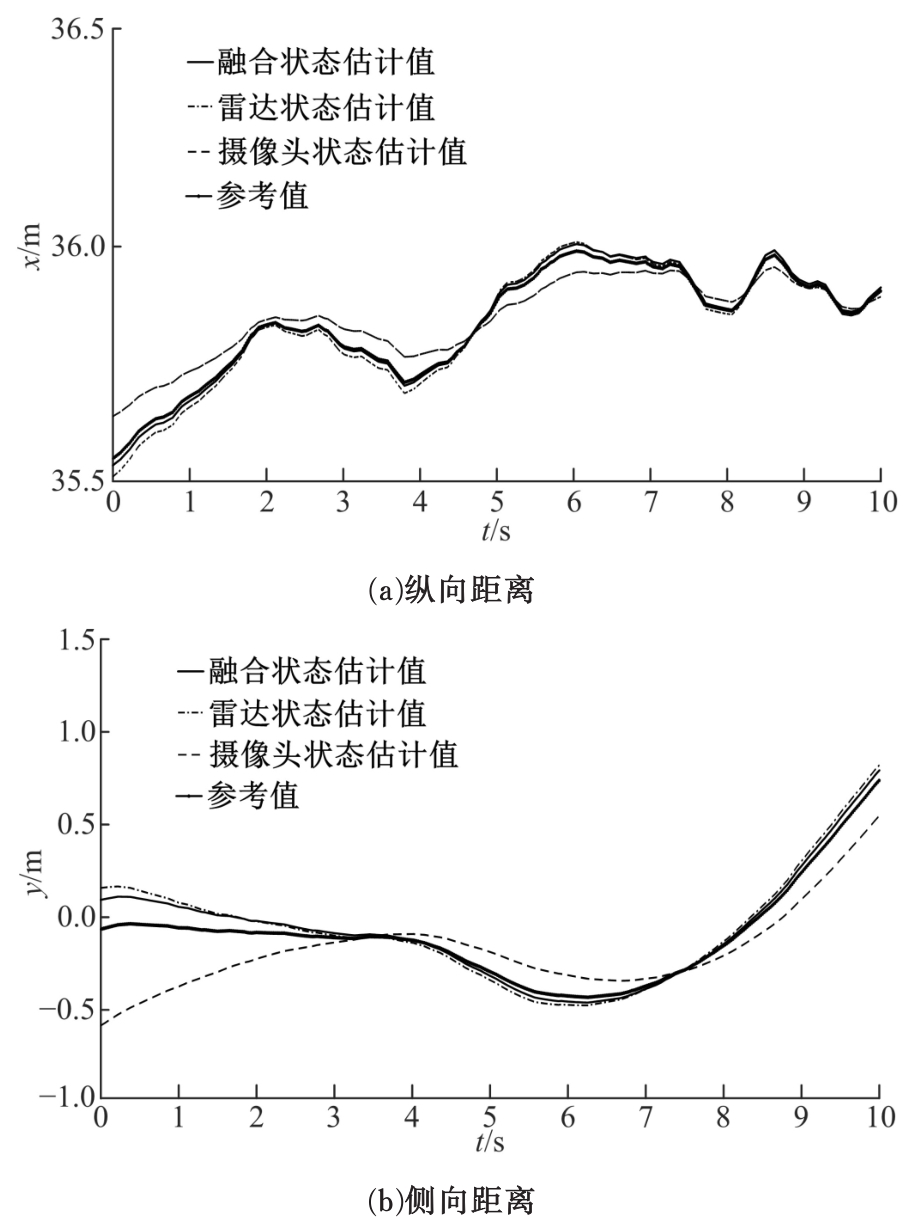
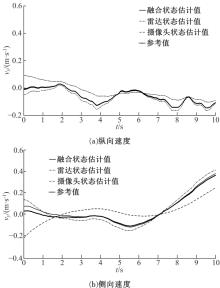
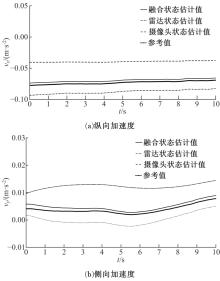
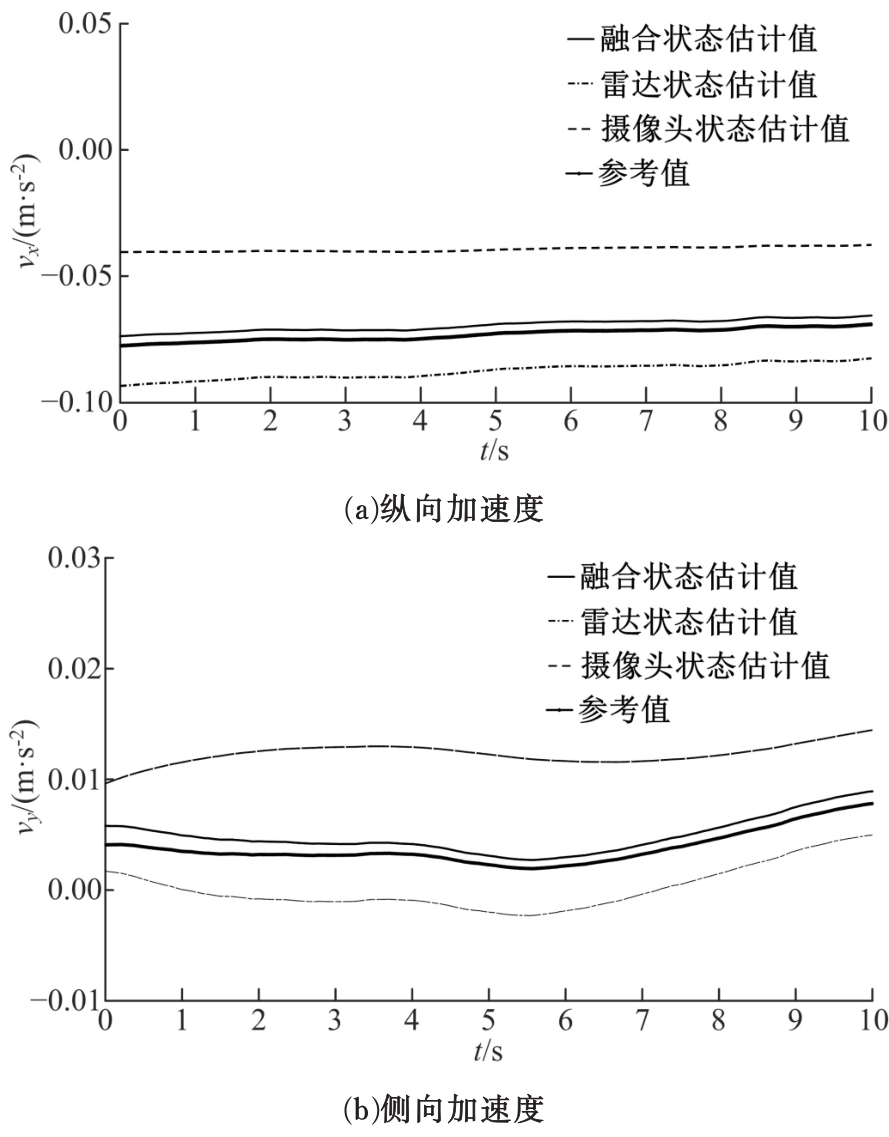
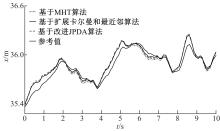
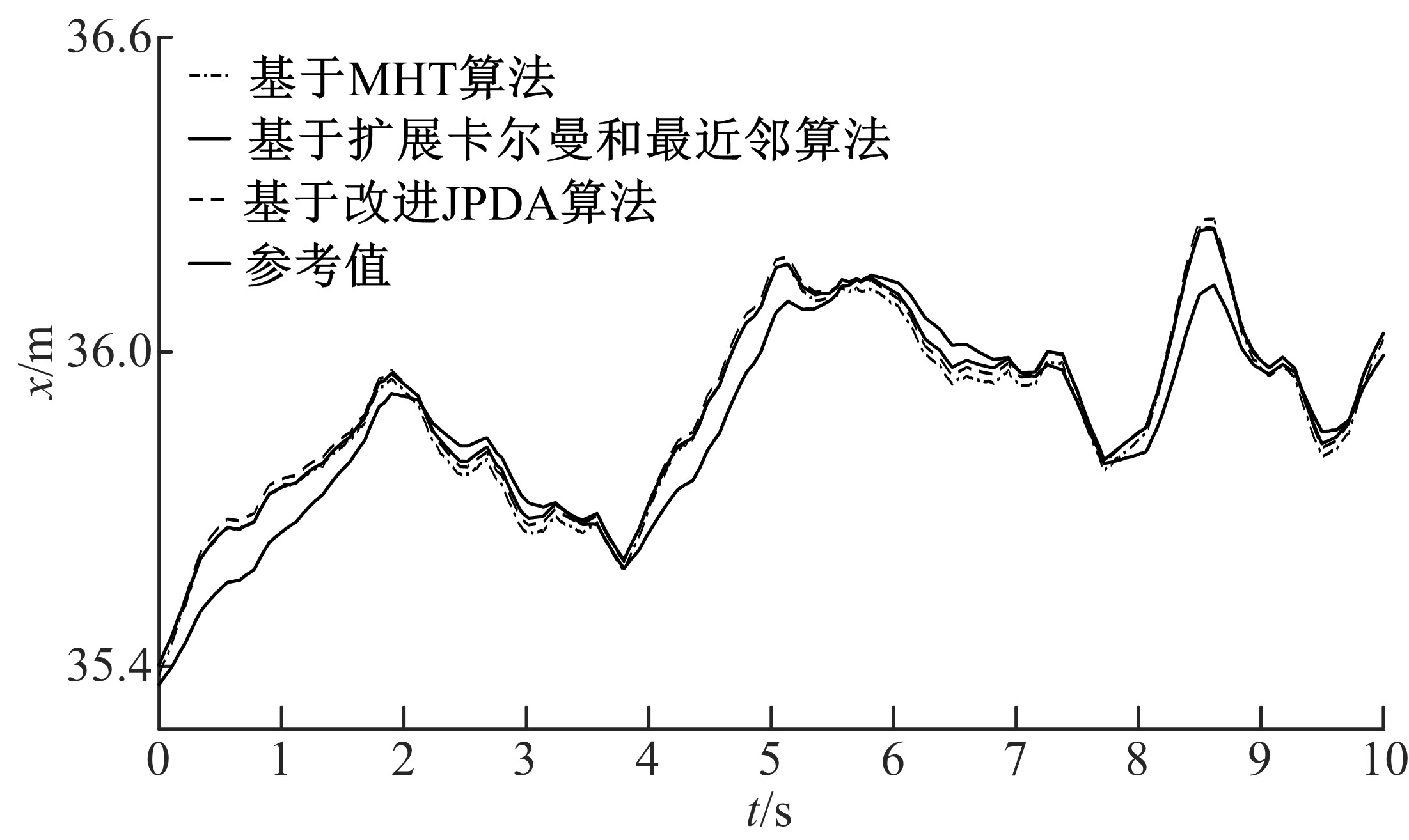
针对智能车辆前向多传感器多目标跟踪融合问题,提出一种基于改进的联合概率数据关联的车用多传感器跟踪融合算法。首先,根据车辆坐标系和各传感器坐标系的相对运动关系,对多传感器数据进行坐标变换,之后采用基于改进的联合概率数据关联的单传感器多目标跟踪算法、基于相关序贯关联法的多传感器关联算法和凸组合融合算法实现了对目标的稳定跟踪与准确融合。最终,通过装备毫米波雷达和摄像头的实验车在实际交通环境下进行实车试验,试验结果表明:目标被稳定跟踪且融合结果具有良好的精度,验证了算法的可行性和有效性。
中图分类号:
- U461.91









| 1 | Xiao F Y , Qin B . A weighted combination method for conflicting evidence in multi-sensor data fusion[J]. Sensors, 2018, 18(5): 1487-1506. |
| 2 | Singer R A , Stein J J . An optimal tracking filter for processing sensor data of imprecisely determined origin in surveillance systems [C]⫽1971 IEEE Conference on Decision and Control, IEEE Miami Beach, 1971: 171-175. |
| 3 | Bar-Shalom Y , Tse E . Tracking in a cluttered environment with probabilistic data association[J]. Automatica, 1975, 11(5): 451-460. |
| 4 | Chang K C , Bar-Shalom Y . Joint probabilistic data association for multitarget tracking with possibly unresolved measurements and maneuvers[J]. IEEE Transactions on Automatic Control, 1983, 29(7): 585-594. |
| 5 | Reid D . An algorithm for tracking multiple targets[J]. IEEE Transactions on Automatic Control, 1978, 24(6): 1202-1211. |
| 6 | 高振海, 王竣, 佟静, 等 . 车载毫米波雷达对前方目标的运动状态估计[J]. 吉林大学学报: 工学版, 2014, 44(6): 1537-1544. |
| Gao Zhen-hai , Wang Jun , Tong Jing , et al . Target motion state estimation for vehicle-borne millimeter-wave radar[J]. Journal of Jilin University (Engineering and Technology Edition), 2014, 44(6): 1537-1544. | |
| 7 | 耿峰, 祝小平 . 一种改进的多传感器多目标跟踪联合概率数据关联算法研究[J]. 系统仿真学报, 2007, 19(20): 4671-4675. |
| Geng Feng , Zhu Xiao-ping . Research of improved joint pro-babilistic data association algorithm for multisensor-multitarget tracking[J]. Journal of System Simulation, 2007, 19(20): 4671-4675. | |
| 8 | 宋晓虹, 陈白帆 . 多传感器信息融合在智能车中的应用研究[J]. 计算机仿真, 2012, 29(6): 320-322, 368. |
| Song Xiao-hong , Chen Bai-fan . Multi-sensor information fusion in intelligent car[J]. Computer Simulation, 2012, 29(6): 320-322, 368. | |
| 9 | 孙晓峰, 郭徽东 . 异类传感器数据融合系统的模型设计与实现[J]. 舰船电子工程, 2016, 36(7): 47-50. |
| Sun Xiao-feng , Guo Hui-dong . Model design and application of dissimilar sensor data fusion system[J]. Ship Electronic Engineering, 2016, 36(7): 47-50. | |
| 10 | 周炳玉, 卢野, 刘珍阳 . 多传感器数据融合中的数据预处理技术研究[J]. 红外与激光工程, 2007, 36(增刊2): 246-249. |
| Zhou Bing-yu , Lu Ye , Liu Zhen-yang . Research on the data preprocessing technique in multi-sensor data fusion system[J]. Infrared and Laser Engineering, 2007,36(Sup.2): 246-249. | |
| 11 | 何友, 高志永 . 多传感器数据融合系统中两种新的航迹相关算法[J]. 电子学报, 1997(9): 10-14. |
| He You , Gao Zhi-yong . Two new track correlation algorithms in a multisensor data fusion system[J]. Acta Electronica Sinica, 1997(9): 10-14. | |
| 12 | Chong C Y , Mori S , Barker W H , et al . Architectures and algorithms for track association and fusion[J]. Aerospace & Electronic Systems Magazine IEEE, 2000, 15(1): 5-13. |
| 13 | 刘卫东, 刘洋, 高立娥 . 基于凸组合和Bar-Shalom-Campo的航迹融合算法研究[J]. 计算机工程与应用, 2014, 50(2): 49-53. |
| Liu Wei-dong , Liu Yang , Gao Li-e . Research of track fusion based on convex combination and Bar-Shalom-Campo[J]. Computer Engineering and Applications, 2014, 50(2): 49-53. | |
| 14 | 康耀红 . 数据融合理论与应用[M]. 西安: 西安电子科技大学出版社, 1997. |
| 15 | Jin B , Guo J , Su B , et al . Adaptive waveform selection for maneuvering target tracking in cognitive radar[J]. Digital Signal Processing, 2018, 75: 210-221. |
| 16 | Yuan T , Krishnan K , Chen Q , et al . Object matching for inter-vehicle communication systems——an IMM-based track association approach with sequential multiple hypothesis test[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(12): 3501-3512. |
| [1] | 马芳武,韩露,周阳,王世英,蒲永锋. 采用聚乳酸复合材料的汽车零件多材料优化设计[J]. 吉林大学学报(工学版), 2019, 49(5): 1385-1391. |
| [2] | 高振海,孙天骏,何磊. 汽车纵向自动驾驶的因果推理型决策[J]. 吉林大学学报(工学版), 2019, 49(5): 1392-1404. |
| [3] | 张博,张建伟,郭孔辉,丁海涛,褚洪庆. 路感模拟用永磁同步电机电流控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1405-1413. |
| [4] | 胡兴军,惠政,郭鹏,张扬辉,张靖龙,王靖宇,刘飞. 基于流固耦合的汽车气动特性[J]. 吉林大学学报(工学版), 2019, 49(5): 1414-1419. |
| [5] | 李静,石求军,刘鹏,户亚威. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1017-1025. |
| [6] | 杨顺,蒋渊德,吴坚,刘海贞. 基于多类型传感数据的自动驾驶深度强化学习方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1026-1033. |
| [7] | 陈鑫,李铭,阮新建,王宁,王佳宁. 基于浸入单元法和延迟分离涡模型的Ahmed车模尾流涡旋结构[J]. 吉林大学学报(工学版), 2019, 49(4): 1034-1042. |
| [8] | 周华,杨志刚,朱晖. 基于整车风洞试验的MIRA车型数值计算[J]. 吉林大学学报(工学版), 2019, 49(4): 1043-1053. |
| [9] | 陈吉清,刘蒙蒙,兰凤崇. 三元动力电池及其成组后的过充安全性试验[J]. 吉林大学学报(工学版), 2019, 49(4): 1072-1080. |
| [10] | 柳润东,毛军,郗艳红,张宏宇,彭飞. 横风下高速列车会车压力波对风障的气动冲击[J]. 吉林大学学报(工学版), 2019, 49(4): 1054-1062. |
| [11] | 秦国锋,那景新,慕文龙,谭伟,栾建泽,申浩. 高温老化对CFRP/铝合金粘接接头失效的影响[J]. 吉林大学学报(工学版), 2019, 49(4): 1063-1071. |
| [12] | 张立斌,吴岛,单洪颖,邓祥敬. 基于制动试验台架的多轴车轴荷自调系统设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1081-1091. |
| [13] | 李寿涛,李秋媛,刘辉,丁辉,田彦涛,于丁力. 可实现车辆稳定性控制的滑模变结构策略[J]. 吉林大学学报(工学版), 2019, 49(4): 1288-1292. |
| [14] | 李雄飞,宋璐,张小利. 基于协同经验小波变换的遥感图像融合[J]. 吉林大学学报(工学版), 2019, 49(4): 1307-1319. |
| [15] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
|
||