吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (4): 1017-1025.doi: 10.13229/j.cnki.jdxbgxb20180517
• •
基于纵向车速估算的商用车ABS神经网络滑模控制
李静( ),石求军,刘鹏,户亚威
),石求军,刘鹏,户亚威
- 吉林大学 汽车仿真与控制国家重点实验室, 长春 130022
Neural network sliding mode control of commercial vehicle ABS based on longitudinal vehicle speed estimation
Jing LI(),Qiu⁃jun SHI,Peng LIU,Ya⁃wei HU
- State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
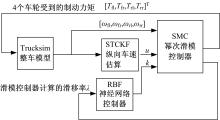
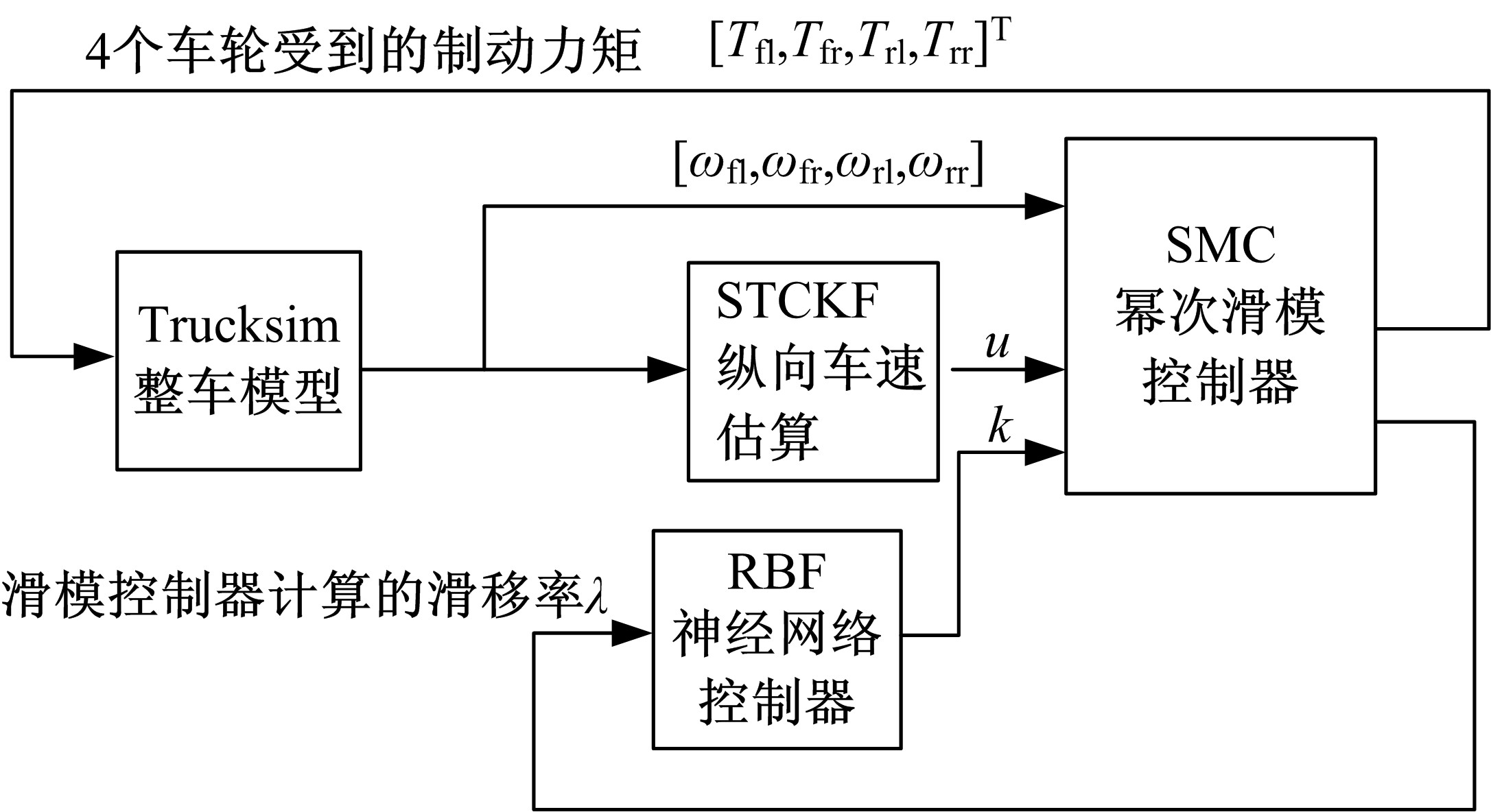
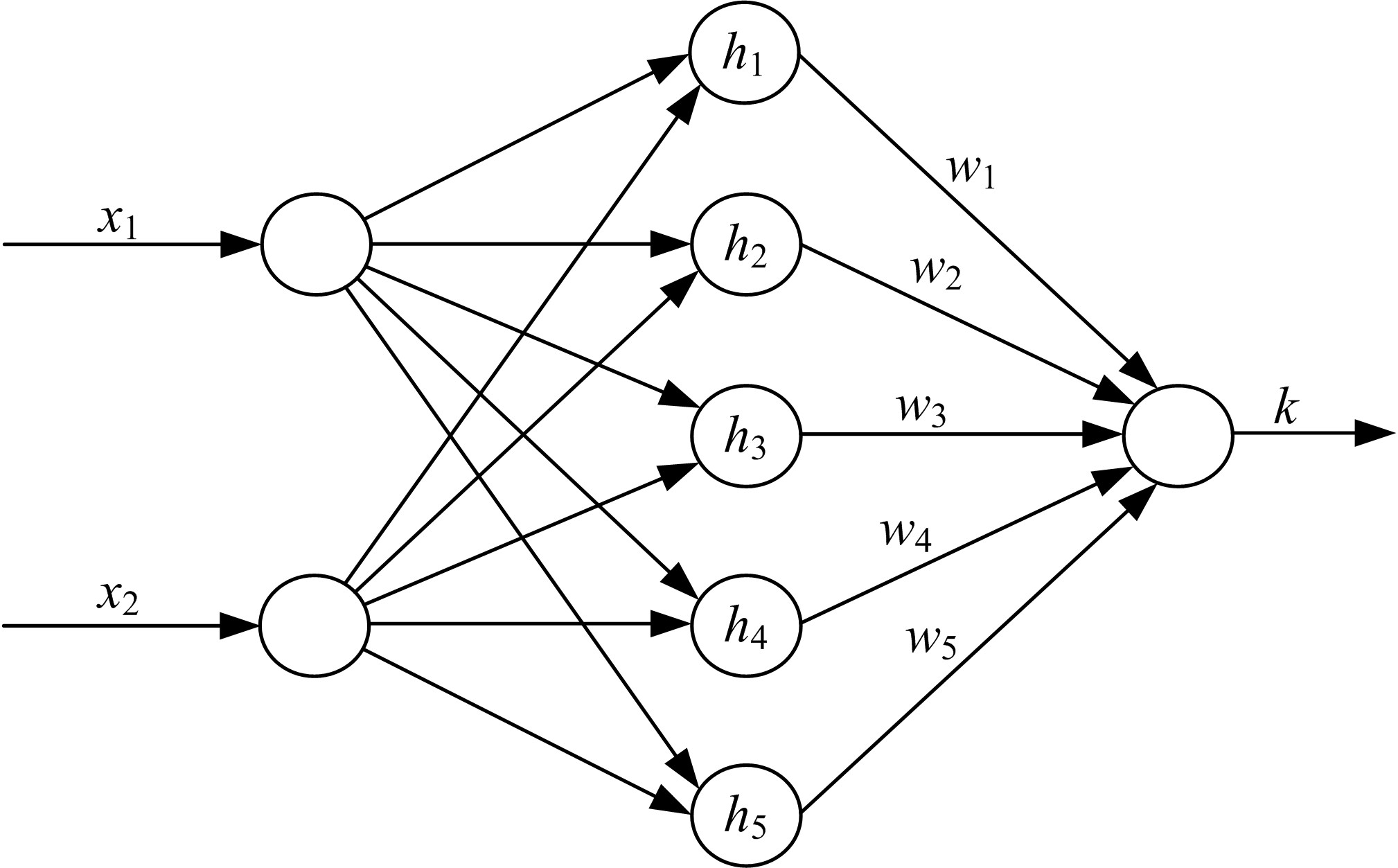
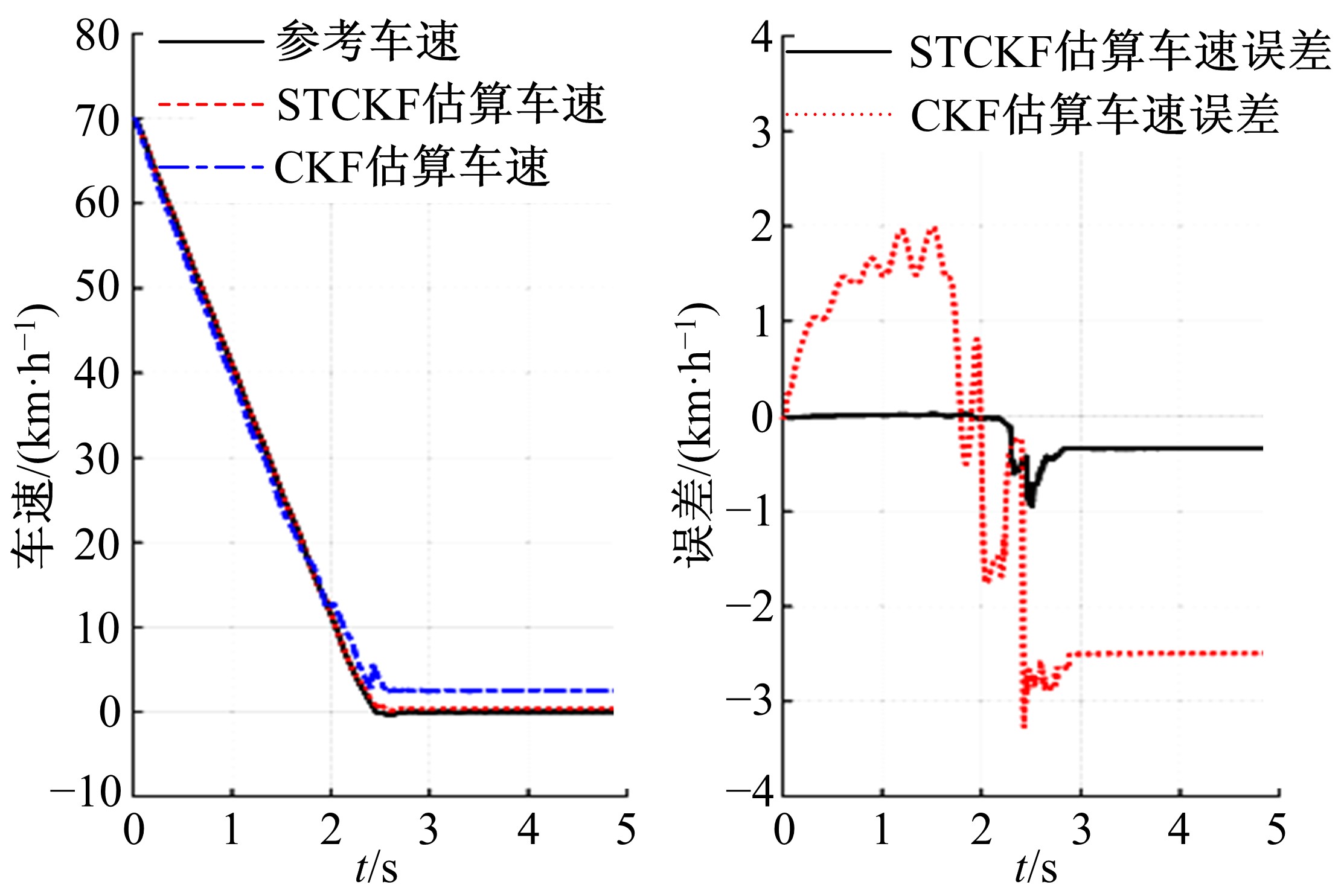
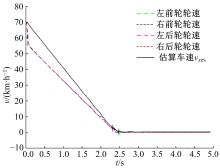
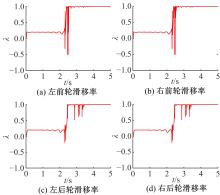
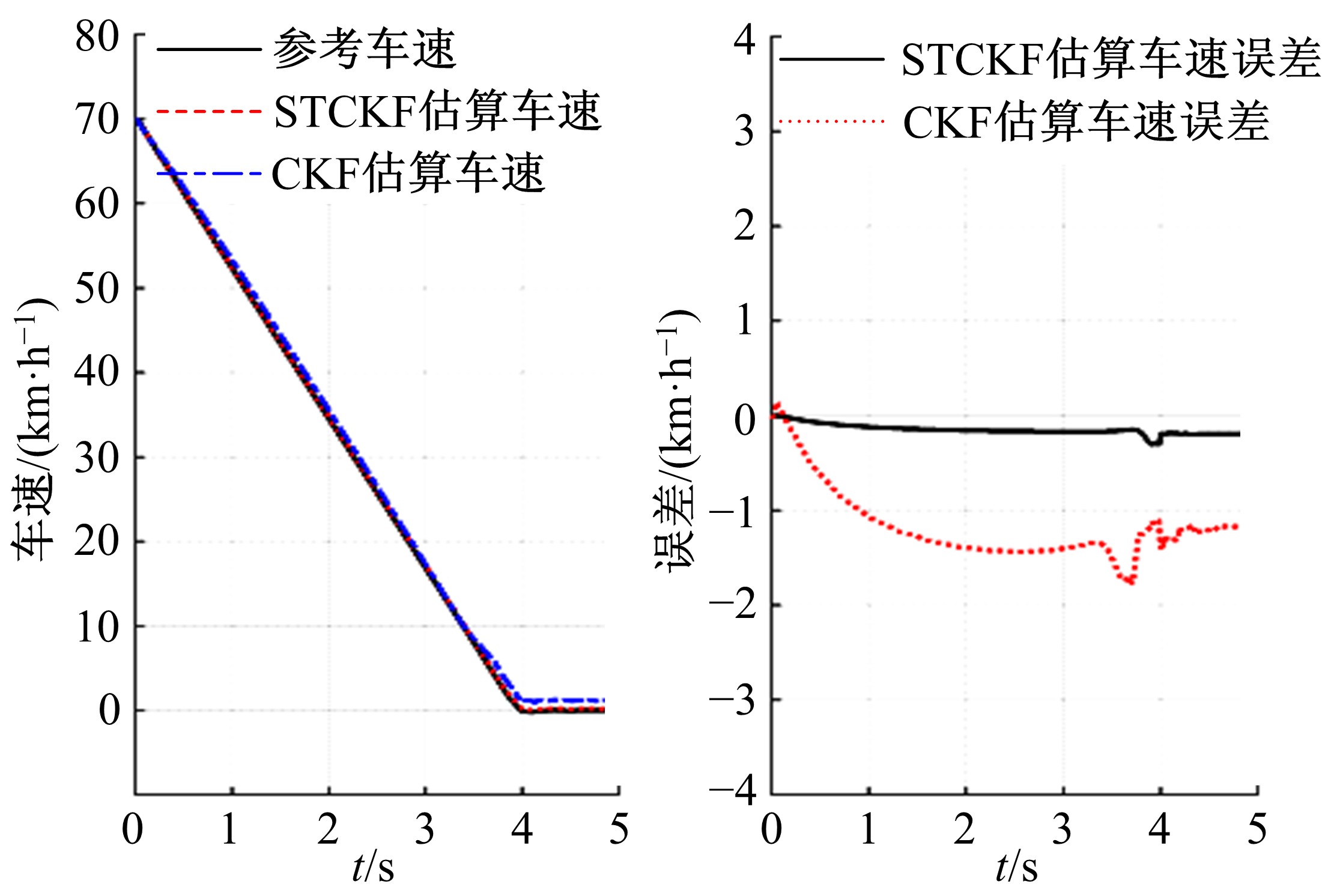
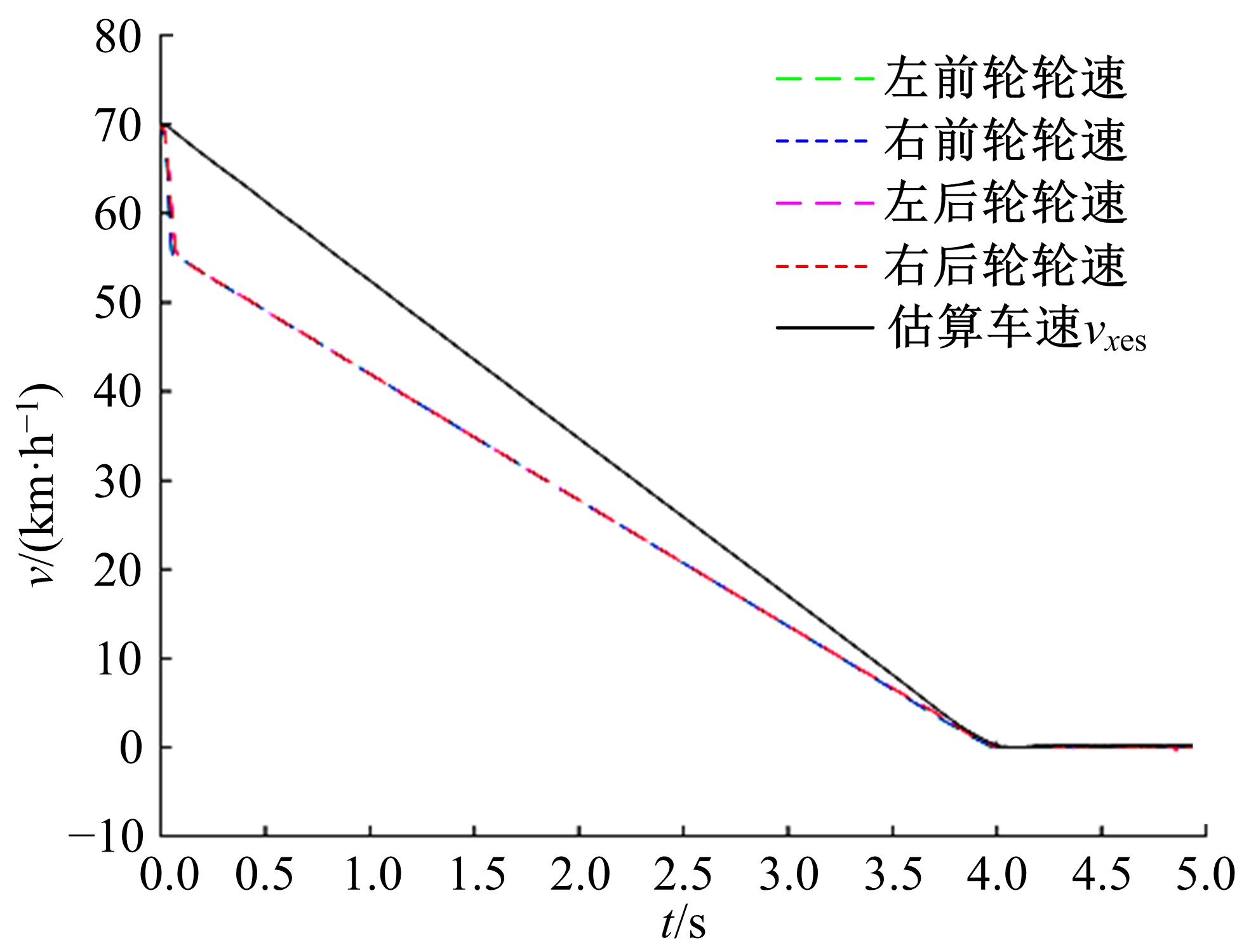
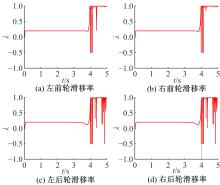
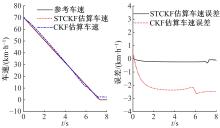
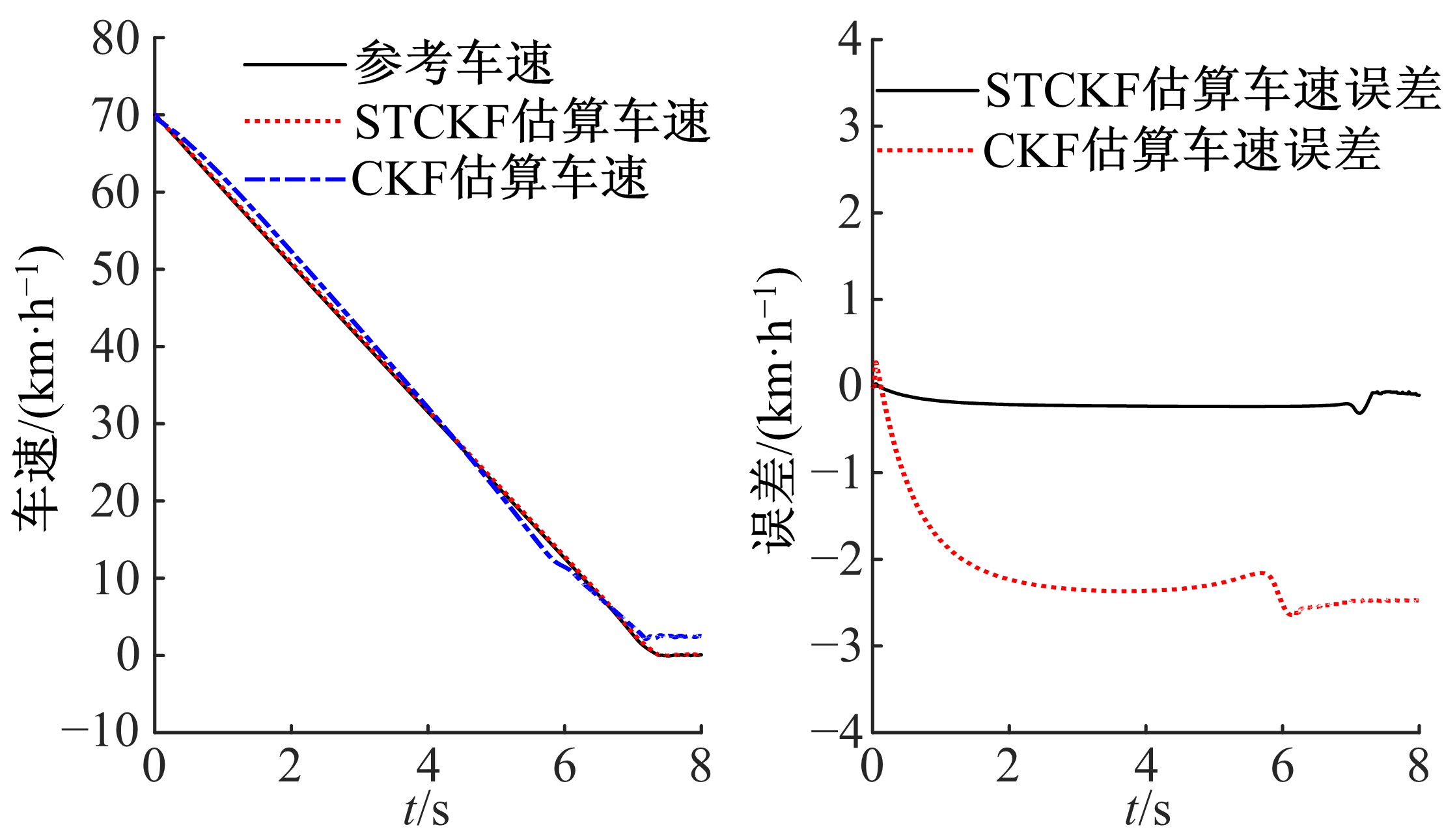
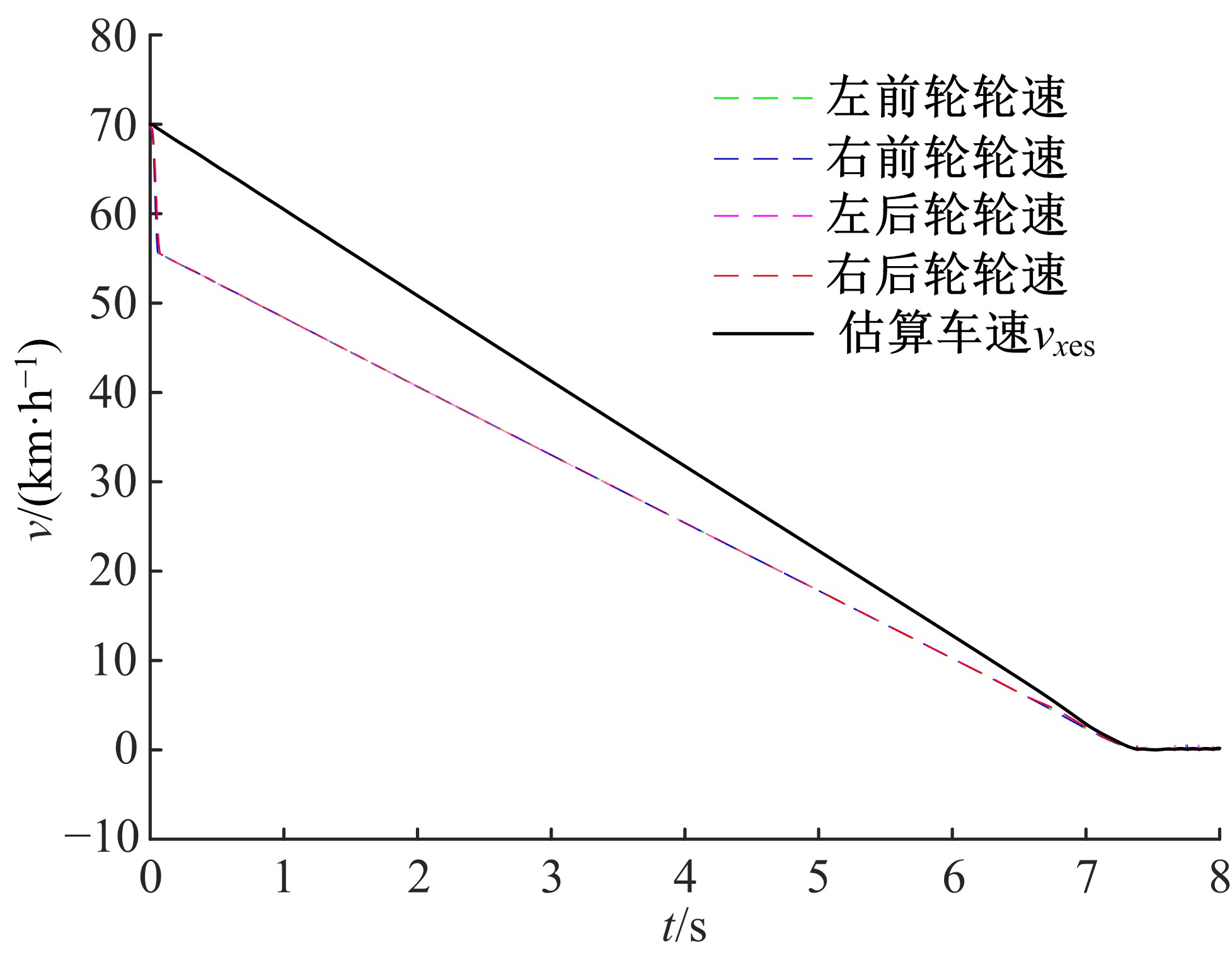
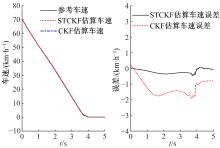
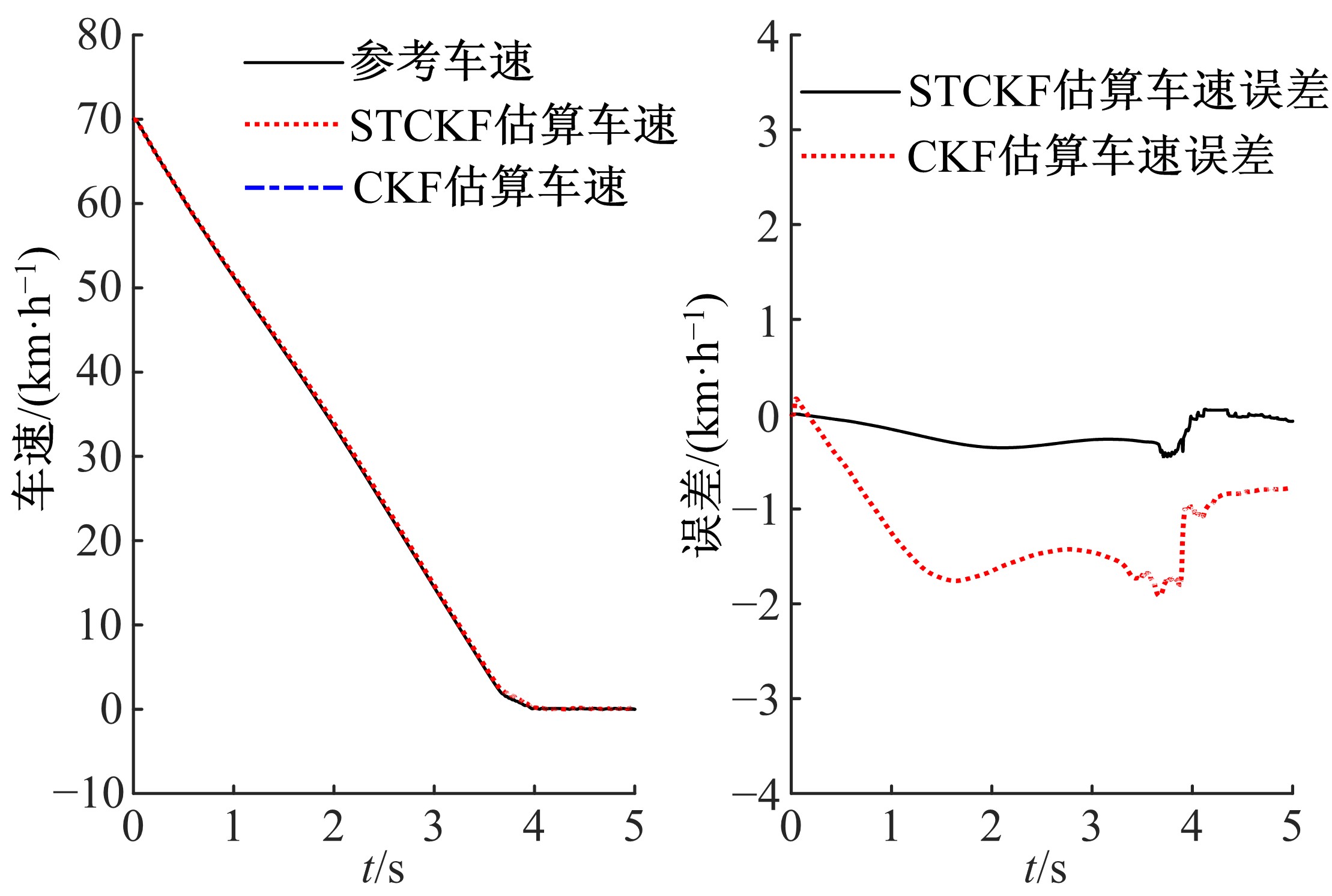
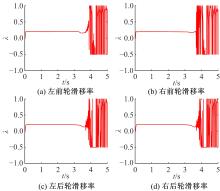
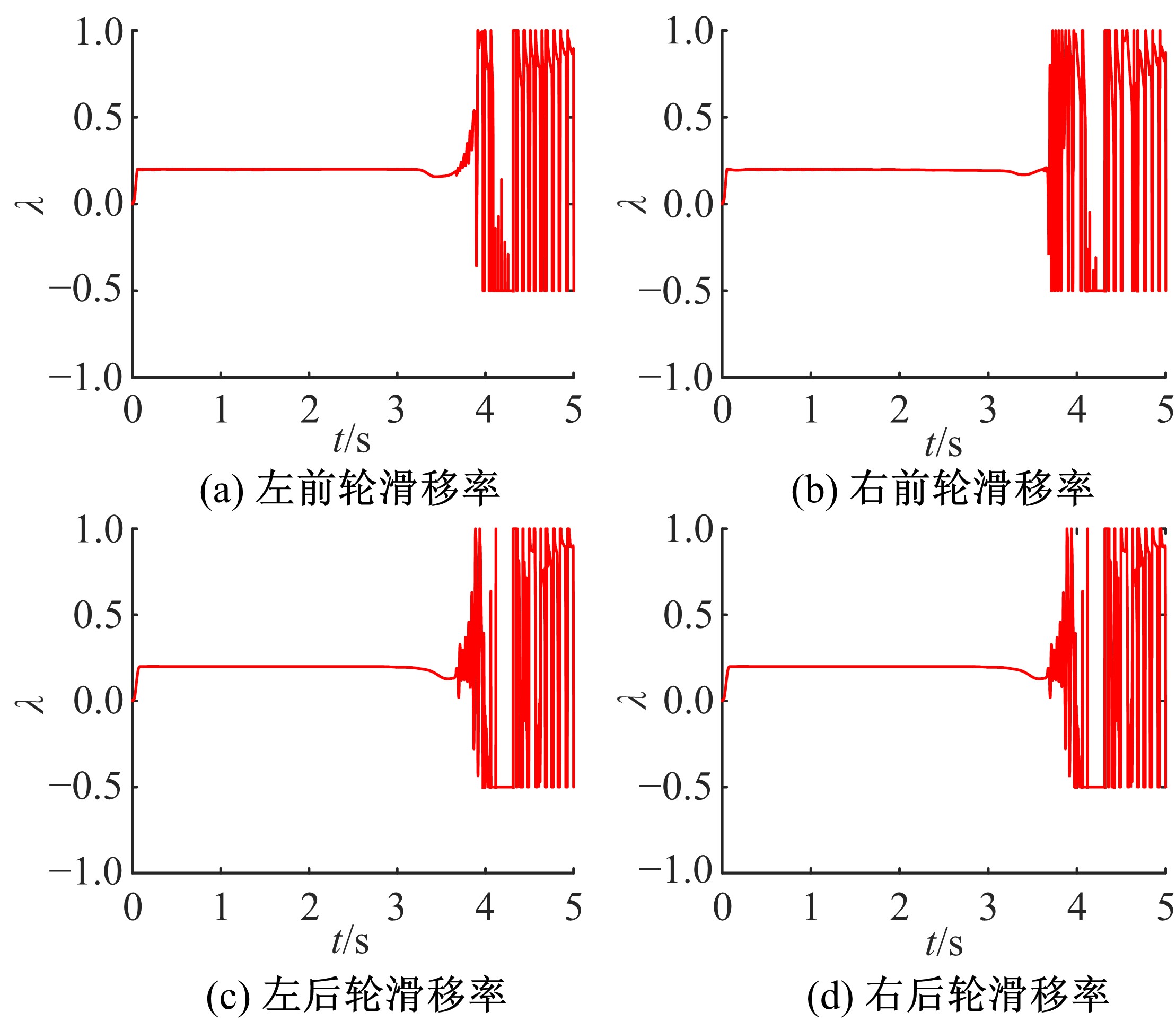
针对商用车防抱死制动系统(ABS)控制中纵向车速难以直接获得,提出了强跟踪容积卡尔曼滤波(STCKF)算法对制动过程中的纵向车速进行估算。然后根据ABS控制需求,提出了商用车ABS神经网络滑模控制算法,利用滑模算法对ABS的滑移率进行控制,再利用神经网络对滑模控制器的参数进行自适应调节。最后通过Matlab/Simulink与TruckSim联合仿真,分别在高、中、低附着系数路面和对开路面上进行仿真验证。仿真结果表明:强跟踪容积卡尔曼滤波算法对纵向车速的估算较为精确,ABS神经网络滑模控制效果良好。
中图分类号:
- U461.1








| 1 | Hashemi E , Kasaiezadeh A , Khosravani S , et al . Estimation of longitudinal speed robust to road conditions for ground vehicles[J]. Vehicle System Dynamics, 2016, 54(8): 1120⁃1146. |
| 2 | Antonov S , Fehn A , Kugi A . Unscented Kalman filter for vehicle state estimation[J].Vehicle System Dynamics, 2011, 49(9): 1497⁃1520. |
| 3 | Reif K , Renner K , Saeger M . Using the unscented kalman filter and a non⁃linear two⁃track model for vehicle state estimation[J]. IFAC Proceedings Volumes, 2008, 17(1):8570⁃8575. |
| 4 | 金贤建, 殷国栋, 陈南,等 . 分布式驱动电动汽车的平方根容积卡尔曼滤波状态观测[J].东南大学学报: 自然科学版, 2016, 46(5): 992⁃996. |
| Jin Xian⁃jian , Yin Guo⁃dong , Chen Nan , et al . State observation of distributed drive electric vehicle using square root cubature Kalman filter[J]. Journal of Southeast University(Natural Science Edition), 2016, 46(5): 992⁃996. | |
| 5 | Li Jing , Zhang Jia⁃xu . Vehicle Sideslip Angle estimation based on hybrid kalman filter[J]. Mathematical Problems in Engineering, 2016(3): 1⁃10. |
| 6 | Sun Ren⁃Yun , Wang Bo , Zhan Yong⁃Fu . Fuzzy control of automobile ECBS on varying pavement[J]. Advanced Materials Research, 2012(383⁃390): 7338⁃7344. |
| 7 | Drakunov S , Ozguner U , Dix P , et al . ABS control using optimum search via sliding modes[J]. IEEE Transactions on Control Systems Technology, 2002, 3(1):79⁃85. |
| 8 | 何祥坤, 季学武, 杨恺明, 等 . 基于集成式线控液压制动系统的轮胎滑移率控制[J]. 吉林大学学报: 工学版, 2018, 48(2): 364⁃372. |
| He Xiang⁃kun , Ji Xue⁃wu , Yang Kai⁃ming , et al . Tire slip control based on integrated⁃electro⁃hydraulic braking system[J]. Journal of Jinlin University(Engineering and Technology Edition), 2018, 48(2): 364⁃372. | |
| 9 | 张炳超 . 商用车气制动ABS鲁棒控制方法研究[D]. 重庆:重庆大学机械工程学院, 2011.Zhang Bing⁃chao. A study of robust control method for pneumatic brake ABS on commercial vehicles[D]. Chongqing: College of Mechanical Engineering, Chongqing University,2011. |
| 10 | 戴彦 . 汽车ABS滑移率的模糊滑模控制研究[J]. 机械设计与制造, 2015(6): 80⁃82. |
| Dai Yan . Study on fuzzy sliding mode control of anti⁃skid⁃brake system based on slip ratio[J]. Machinery Design & Manufacture, 2015(6): 80⁃82. | |
| 11 | Li Qiu⁃rong , Sun Feng . Strong tracking cubature Kalman filter algorithm for GPS/INS Integrated Navigation System[C]∥IEEE International Conference on Mechatronics and Automation. IEEE, 2013:1113⁃1117. |
| 12 | Xia Bi⁃zhong , Wang Hai⁃qing , Wang Ming⁃wang , et al . A new method for state of charge estimation of lithium⁃ion battery based on strong tracking cubature kalman filter[J]. Energies, 2015, 8(12): 13458⁃13472. |
| 13 | 朱为文 . 某客车复合制动系统控制策略研究[D]. 长春: 吉林大学汽车工程学院, 2017.Zhu Wei⁃wen. Study on control of composite braking system for a bus[D]. Changchun: College of Automotive Engineering, Jilin University, 2017. |
| 14 | Dugoff H , Fancher P S , Segel L . An analysis of tire traction properties and their influence on vehicle dynamic performance[C]∥SAE Papers, 700377. |
| 15 | 李秋荣 . 改进容积卡尔曼滤波算法及其导航应用研究[D]. 哈尔滨: 哈尔滨工程大学自动化学院, 2015.Li Qiu⁃rong. Research on improved cubatrue Kalman filter and its application in navigation[D]. Harbin: College of Automation, Harbin Engineering University, 2015. |
| 16 | 王建敏, 董小萌, 吴云洁 . 高超声速飞行器RBF神经网络滑模变结构控制[J]. 电机与控制学报, 2016, 20(5):103⁃110. |
| Wang Jian⁃min , Dong Xiao⁃meng , Wu Yun⁃jie . Hypersonic flight vehicle of sliding mode variable structure control based on RBF neural network[J]. Electric Machines and Control, 2016, 20(5): 103⁃110. |
| [1] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
| [2] | 欧阳丹彤,肖君,叶育鑫. 基于实体对弱约束的远监督关系抽取[J]. 吉林大学学报(工学版), 2019, 49(3): 912-919. |
| [3] | 常成,宋传学,张雅歌,邵玉龙,周放. 双馈电机驱动电动汽车变频器容量最小化[J]. 吉林大学学报(工学版), 2018, 48(6): 1629-1635. |
| [4] | 席利贺,张欣,孙传扬,王泽兴,姜涛. 增程式电动汽车自适应能量管理策略[J]. 吉林大学学报(工学版), 2018, 48(6): 1636-1644. |
| [5] | 何仁,杨柳,胡东海. 冷藏运输车太阳能辅助供电制冷系统设计及分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1645-1652. |
| [6] | 那景新,慕文龙,范以撒,谭伟,杨佳宙. 车身钢-铝粘接接头湿热老化性能[J]. 吉林大学学报(工学版), 2018, 48(6): 1653-1660. |
| [7] | 刘玉梅,刘丽,曹晓宁,熊明烨,庄娇娇. 转向架动态模拟试验台避撞模型的构建[J]. 吉林大学学报(工学版), 2018, 48(6): 1661-1668. |
| [8] | 江涛,林学东,李德刚,杨淼,汤雪林. 基于人工神经网络的放热规律的量化预测[J]. 吉林大学学报(工学版), 2018, 48(6): 1747-1754. |
| [9] | 徐岩,孙美双. 基于卷积神经网络的水下图像增强方法[J]. 吉林大学学报(工学版), 2018, 48(6): 1895-1903. |
| [10] | 赵伟强, 高恪, 王文彬. 基于电液耦合转向系统的商用车防失稳控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1305-1312. |
| [11] | 宋大凤, 吴西涛, 曾小华, 杨南南, 李文远. 基于理论油耗模型的轻混重卡全生命周期成本分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1313-1323. |
| [12] | 朱剑峰, 张君媛, 陈潇凯, 洪光辉, 宋正超, 曹杰. 基于座椅拉拽安全性能的车身结构改进设计[J]. 吉林大学学报(工学版), 2018, 48(5): 1324-1330. |
| [13] | 那景新, 浦磊鑫, 范以撒, 沈传亮. 湿热环境对Sikaflex-265铝合金粘接接头失效强度的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1331-1338. |
| [14] | 王炎, 高青, 王国华, 张天时, 苑盟. 混流集成式电池组热管理温均特性增效仿真[J]. 吉林大学学报(工学版), 2018, 48(5): 1339-1348. |
| [15] | 金立生, 谢宪毅, 高琳琳, 郭柏苍. 基于二次规划的分布式电动汽车稳定性控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1349-1359. |
|
||