吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (1): 375-381.doi: 10.13229/j.cnki.jdxbgxb20180545
• 农业工程·仿生工程 • 上一篇
蜘蛛生物液压驱动原理及其功能仿生探索
刘春宝1,2( ),陈山石1,盛闯1,2,钱志辉2,任露泉2,任雷2,3()
),陈山石1,盛闯1,2,钱志辉2,任露泉2,任雷2,3()
- 1. 吉林大学 机械与航空航天工程学院,长春 130022
2. 吉林大学 工程仿生教育部重点实验室, 长春 130022
3. 曼彻斯特大学 机械工程学院,曼彻斯特M13 9PL 英国
Bionic hydraulic driving mechanism of spider and its bio⁃inspiration
Chun-bao LIU1,2(),Shan-shi CHEN1,Chuang SHENG1,2,Zhi-hui QIAN2,Lu-quan REN2,Lei REN2,3()
- 1. College of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China
2. Key Laboratory of Bionic Engineering, Ministry of Education, Jilin University, Changchun 130022, China
3. School of Mechanical, Aerospace and Civil Engineering, University of Manchester, Manchester M13 9PL, UK
摘要:
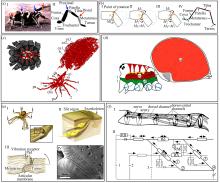
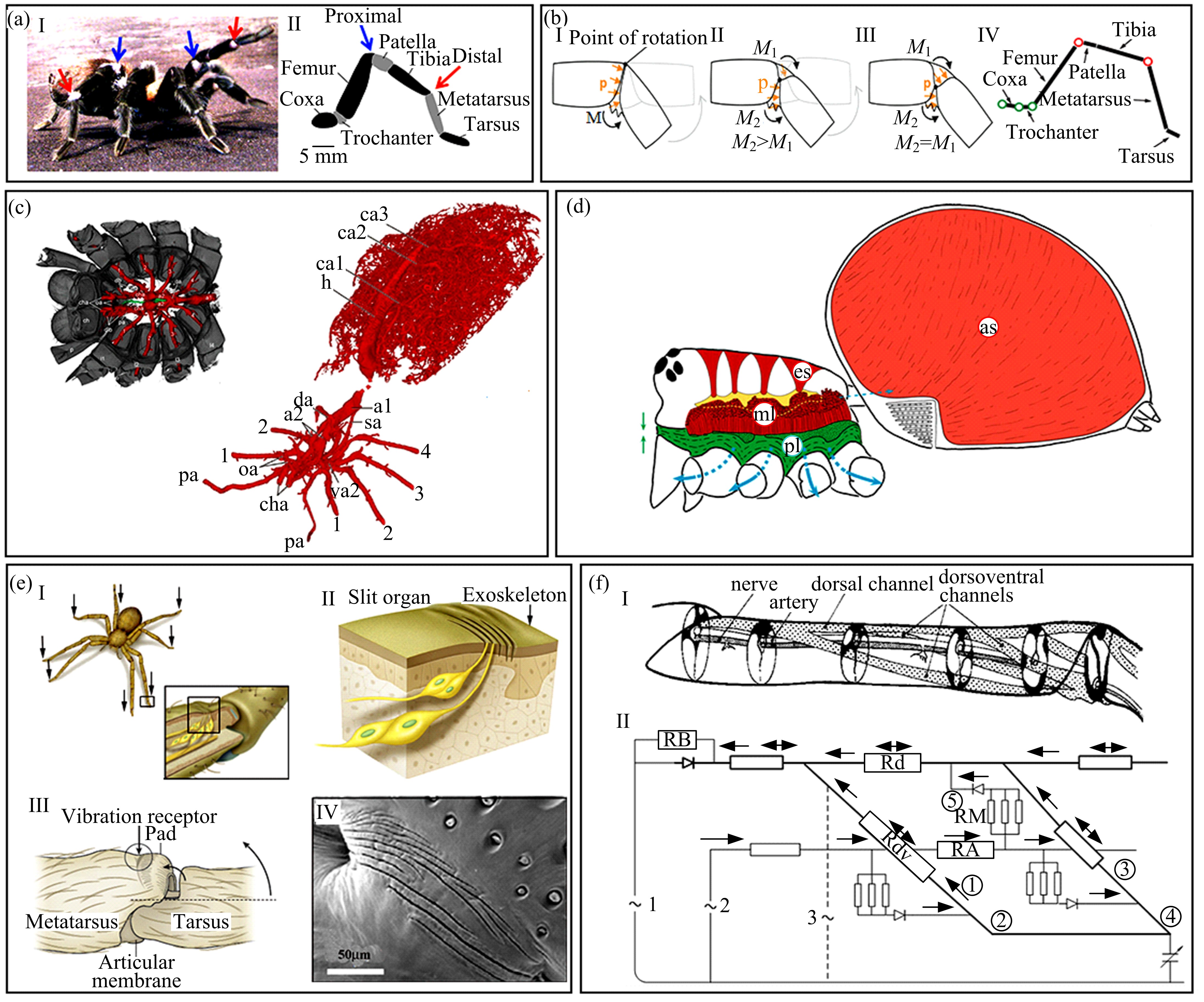
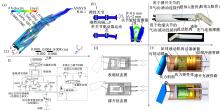
针对蜘蛛生物液压驱动原理的研究进行了综述,对蜘蛛步足液压原理进行了分析,尝试建立生物液压与工程液压难题的联系。首先,以海南捕鱼蜘蛛作为研究对象,通过电镜扫描、组织切片、Micro-CT等多种观测扫描实验得到其内流道模型,并基于该模型使用CFD软件对流动机理进行了研究。然后,根据CFD后处理得到的血淋巴流动轨迹,设计了一种仿生液压系统,为工程液压系统的设计提供一种新的思路。最后,针对蜘蛛步足的液压系统进行了功能仿生探索,设计了一种仿蜘蛛一体化双向运动关节,解决了现有仿蜘蛛关节不能实现驱动一体化、驱动精度得不到保证的问题,并高度再现了蜘蛛的生物驱动过程。
中图分类号:
- TB17

| 1 | 任露泉,梁云虹. 仿生学导论[M]. 北京: 科学出版社, 2016. |
| 2 | Zentner L. Modelling and Application of the Hydraulic Spider Leg Mechanism[M]. Berlin: Springer, 2013: 451-462. |
| 3 | Sun J, Ling M, Wu W, et al. The hydraulic mechanism of the unfolding of hind wings in dorcus titanus platymelus (Order: Coleoptera)[J]. International Journal of Molecular Sciences, 2014, 15(4): 6009-6018. |
| 4 | Gomel B J, Costello J H, Colin S P, et al. Passive energy recapture in jellyfish contributes to propulsive advantage over other metazoans[J]. Proceedings of the National Academy of Sciences, 2013, 110(44): 17904-17909. |
| 5 | Dorgan K M. The biomechanics of burrowing and boring[J]. Journal of Experimental Biology, 2015, 218(2): 176-183. |
| 6 | Hennebert E, Haesaerts D, Dubois P, et al. Evaluation of the different forces brought into play during tube foot activities in sea stars[J]. Journal of Experimental Biology, 2010, 213(7): 1162-1174. |
| 7 | 许仰曾. 对中国液压技术发展路线图的解读与思考[J]. 流体传动与控制, 2013 (1): 1-6. |
| Xu Yang-zeng. The roadmap of hydraulic technology development in China[J]. Fluid Power Transmission and Control, 2013 (1): 1-6. | |
| 8 | Booster N A, Su F Y, Adolph S C, et al. Effect of temperature on leg kinematics in sprinting tarantulas (Aphonopelma hentzi): high speed may limit hydraulic joint actuation[J]. Journal of Experimental Biology, 2015, 218(7): 977-982. |
| 9 | Manton S M, Harding J P. Hydrostatic pressure and leg extension in arthropods, with special reference to arachnids[J]. Journal of Natural History, 1958, 1(3): 161-182. |
| 10 | Parry D A, Brown R H J. The jumping mechanism of salticid spiders[J]. Journal of Experimental Biology, 1959, 36(4): 654-664. |
| 11 | Stewart D M, Martin A W. Blood pressure in the tarantula, Dugesiella hentzi[J]. Journal of Comparative Physiology A: Neuroethology, Sensory, Neural, and Behavioral Physiology, 1974, 88(2): 141-172. |
| 12 | Sensenig A T, Shultz J W. Mechanics of cuticular elastic energy storage in leg joints lacking extensor muscles in arachnids[J]. Journal of Experimental Biology, 2003, 206(4): 771-784. |
| 13 | Huckstorf K, Kosok G, Seyfarth E A, et al. The hemolymph vascular system in Cupiennius salei (Araneae: Ctenidae)[J]. Zoologischer Anzeiger―A Journal of Comparative Zoology, 2013, 252(1): 76-87. |
| 14 | Uhl G. Spider Olfaction: Attracting, Detecting, Luring and Avoiding[M]. Berlin: Springer, 2013: 141-157. |
| 15 | Schamber C F, Garb S N, Barth F G. Force transformation in spider strain sensors: white light interferometry[J]. Journal of the Royal Society Interface, 2012, 9(71): 1254-1264. |
| 16 | Fratzl P, Barth F G. Biomaterial systems for mechanosensing and actuation[J]. Nature, 2009, 462(7272): 442-448. |
| 17 | Blickhan R, Barth F G. Strains in the exoskeleton of spiders[J]. Journal of Comparative Physiology A, 1985, 157(1):115-147. |
| 18 | Menon C, Lira C. Active articulation for future space applications inspired by the hydraulic system of spiders[J]. Bioinspiration & Biomimetics, 2006, 1(2): 52-61. |
| 19 | Landkammer S, Hornfeck R. A novel bio-inspired fluidic actuator for robotic applications[C]∥The 25th International Conference on Adaptive Structures and Technologies, The Hague, Netherlands, 2014. |
| [1] | 陈东良,臧睿,段鹏,赵伟鹏,翁旭涛,孙杨,唐艺鹏. 基于新月鱼尾推进理论的多连杆鱼骨仿生设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1246-1257. |
| [2] | 吴娜,庄健,张克松,王慧鑫,马云海. 毛蚶贝壳曲面承压力学特性及断裂机理[J]. 吉林大学学报(工学版), 2019, 49(3): 897-902. |
| [3] | 郭昊添,徐涛,梁逍,于征磊,刘欢,马龙. 仿鲨鳃扰流结构的过渡段换热表面优化设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1793-1798. |
| [4] | 熙鹏,丛茜,王庆波,郭华曦. 仿生条纹形磨辊磨损试验及耐磨机理分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1787-1792. |
| [5] | 田为军, 王骥月, 李明, 张兴旺, 张勇, 丛茜. 面向水上机器人的水黾运动观测[J]. 吉林大学学报(工学版), 2018, 48(3): 812-820. |
| [6] | 钱志辉, 周亮, 任雷, 任露泉. 具有仿生距下关节和跖趾关节的完全被动步行机[J]. 吉林大学学报(工学版), 2018, 48(1): 205-211. |
| [7] | 陈东辉, 刘伟, 吕建华, 常志勇, 吴婷, 慕海锋. 基于虾夷扇贝体表结构的玉米茬根捡拾器仿生设计[J]. 吉林大学学报(工学版), 2017, 47(4): 1185-1193. |
| [8] | 田丽梅, 王养俊, 李子源, 商延赓. 仿生功能表面内流减阻测试系统的研制[J]. 吉林大学学报(工学版), 2017, 47(4): 1179-1184. |
| [9] | 王颖, 李建桥, 张广权, 黄晗, 邹猛. 基于多种介质的仿生步行足力学特性[J]. 吉林大学学报(工学版), 2017, 47(2): 546-551. |
| [10] | 葛长江, 叶辉, 胡兴军, 于征磊. 鸮翼后缘噪声的预测及控制[J]. 吉林大学学报(工学版), 2016, 46(6): 1981-1986. |
| [11] | 李梦, 苏义脑, 孙友宏, 高科. 高胎体仿生异型齿孕镶金刚石钻头[J]. 吉林大学学报(工学版), 2016, 46(5): 1540-1545. |
| [12] | 梁云虹, 任露泉. 自然生境及其仿生学初探[J]. 吉林大学学报(工学版), 2016, 46(5): 1746-1756. |
| [13] | 梁云虹, 任露泉. 人类生活及其仿生学初探[J]. 吉林大学学报(工学版), 2016, 46(4): 1373-1384. |
| [14] | 钱志辉, 苗怀彬, 任雷, 任露泉. 基于多种步态的德国牧羊犬下肢关节角[J]. 吉林大学学报(工学版), 2015, 45(6): 1857-1862. |
| [15] | 杨卓娟, 王庆成, 高英, 门玉琢, 杨晓东. 不同溶液对荷叶润湿性能的影响[J]. 吉林大学学报(工学版), 2015, 45(6): 1869-1873. |
|
||