吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (5): 1246-1257.doi: 10.13229/j.cnki.jdxbgxb.20221519
• 交通运输工程·土木工程 • 上一篇
基于时空图模型的车-路-图协同定位方法
胡钊政1,2( ),孙勋培1,张佳楠1,黄戈1,柳雨婷1
),孙勋培1,张佳楠1,黄戈1,柳雨婷1
- 1.武汉理工大学 智能交通系统研究中心,武汉 430063
2.武汉理工大学 重庆研究院,重庆 401120
Vehicle-infrastructure-map cooperative localization method based on spatial-temporal graph model
Zhao-zheng HU1,2(),Xun-pei SUN1,Jia-nan ZHANG1,Ge HUANG1,Yu-ting LIU1
- 1.Intelligent Transportation Systems Research Center,Wuhan University of Technology,Wuhan 430063,China
2.Chongqing Research Institute,Wuhan University of Technology,Chongqing 401120,China
摘要:
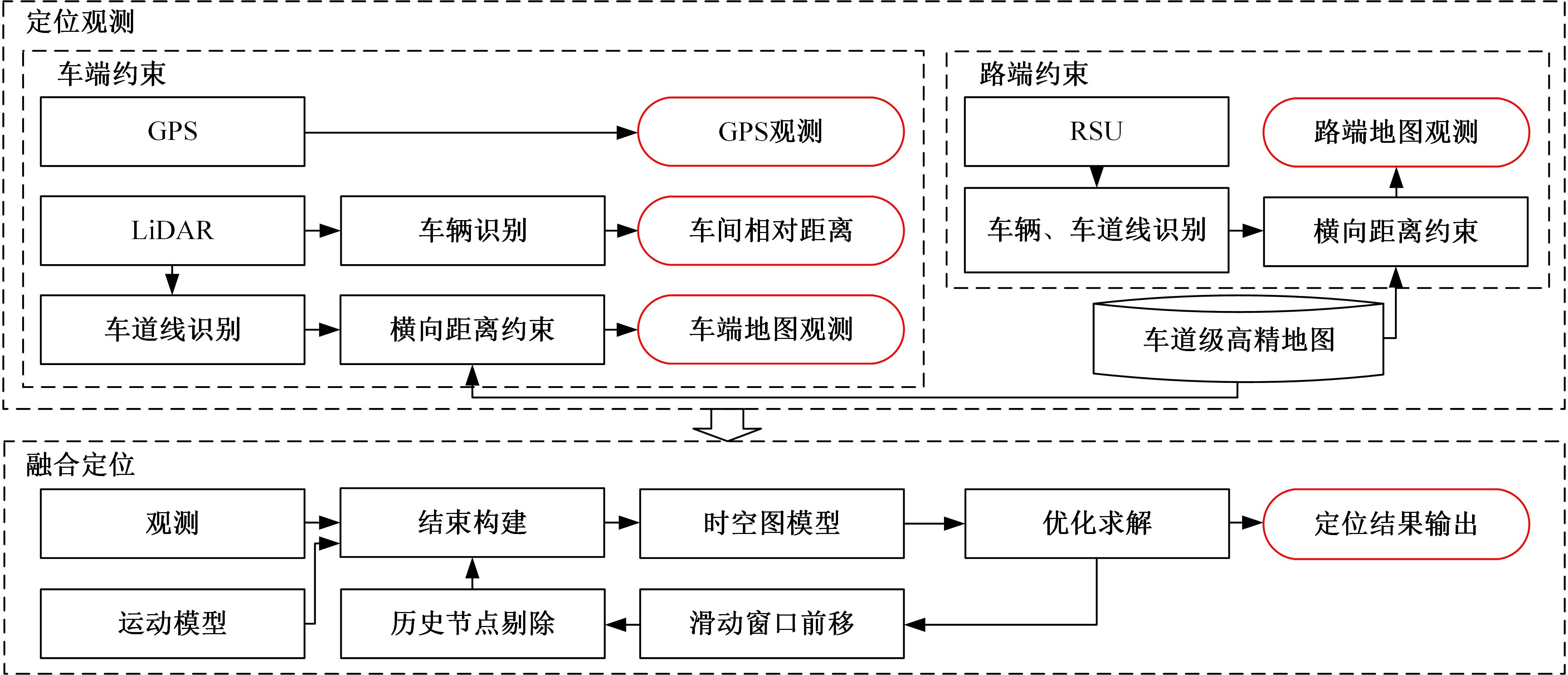
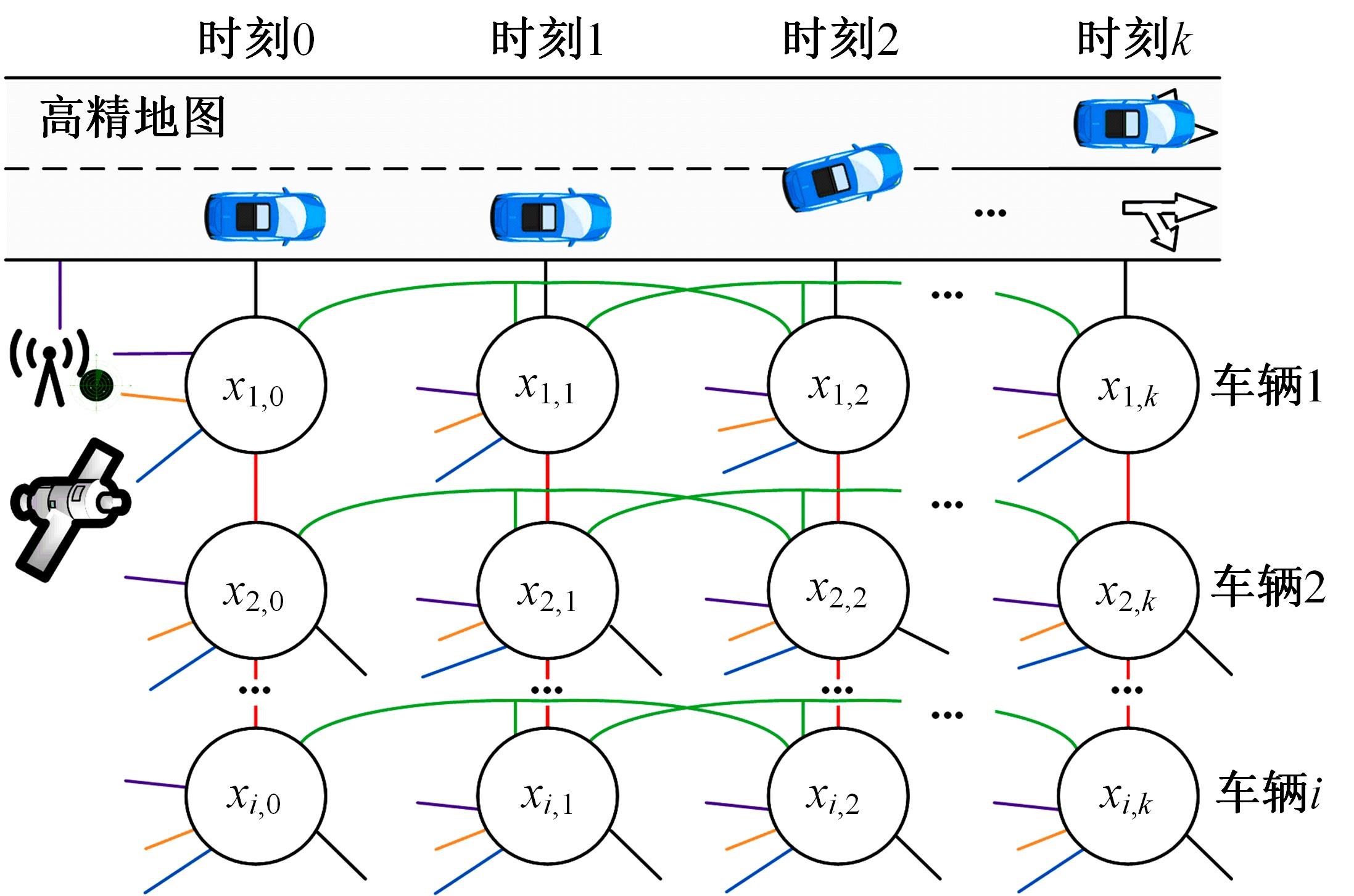
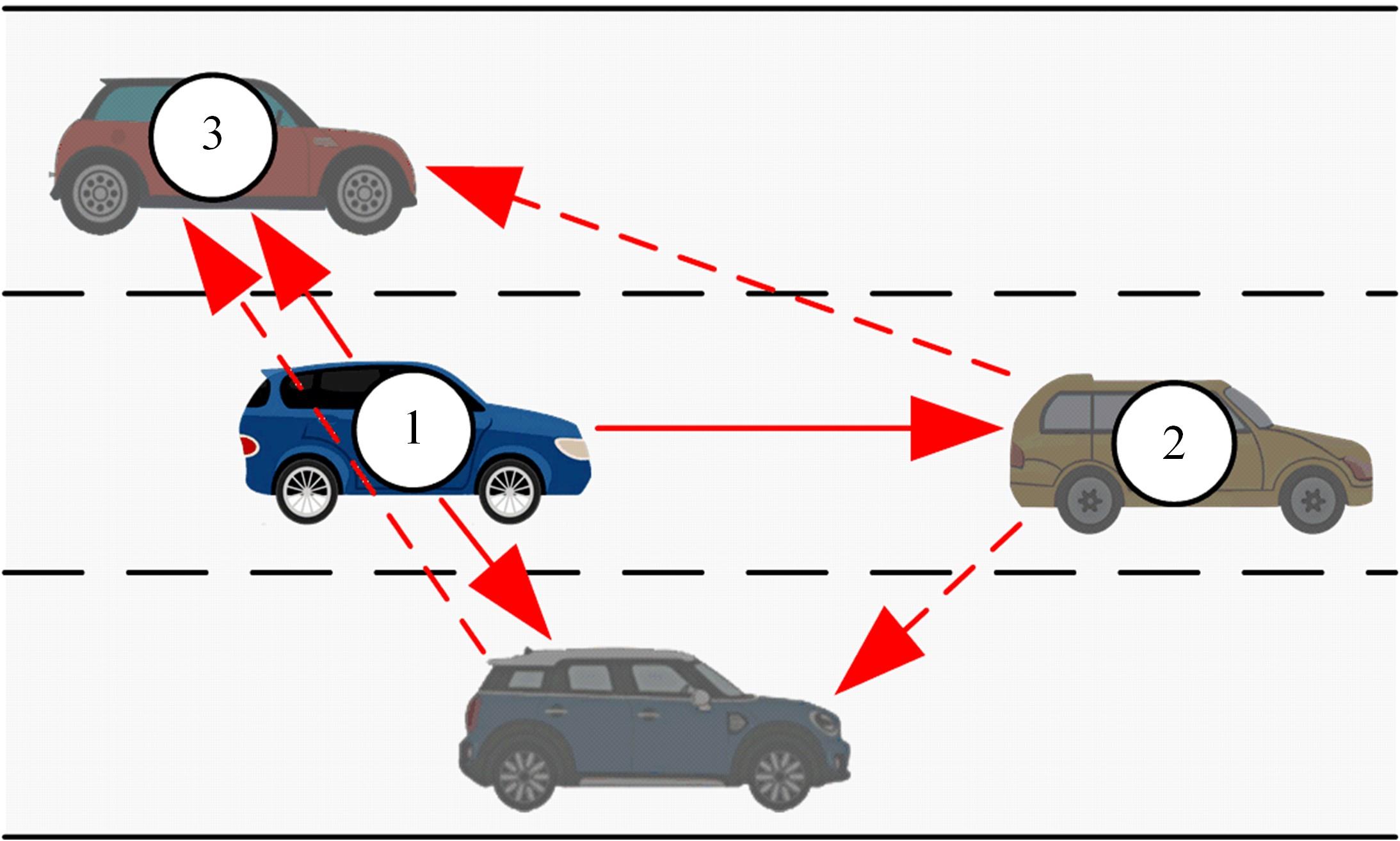
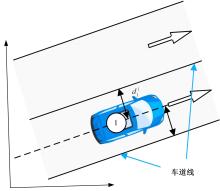
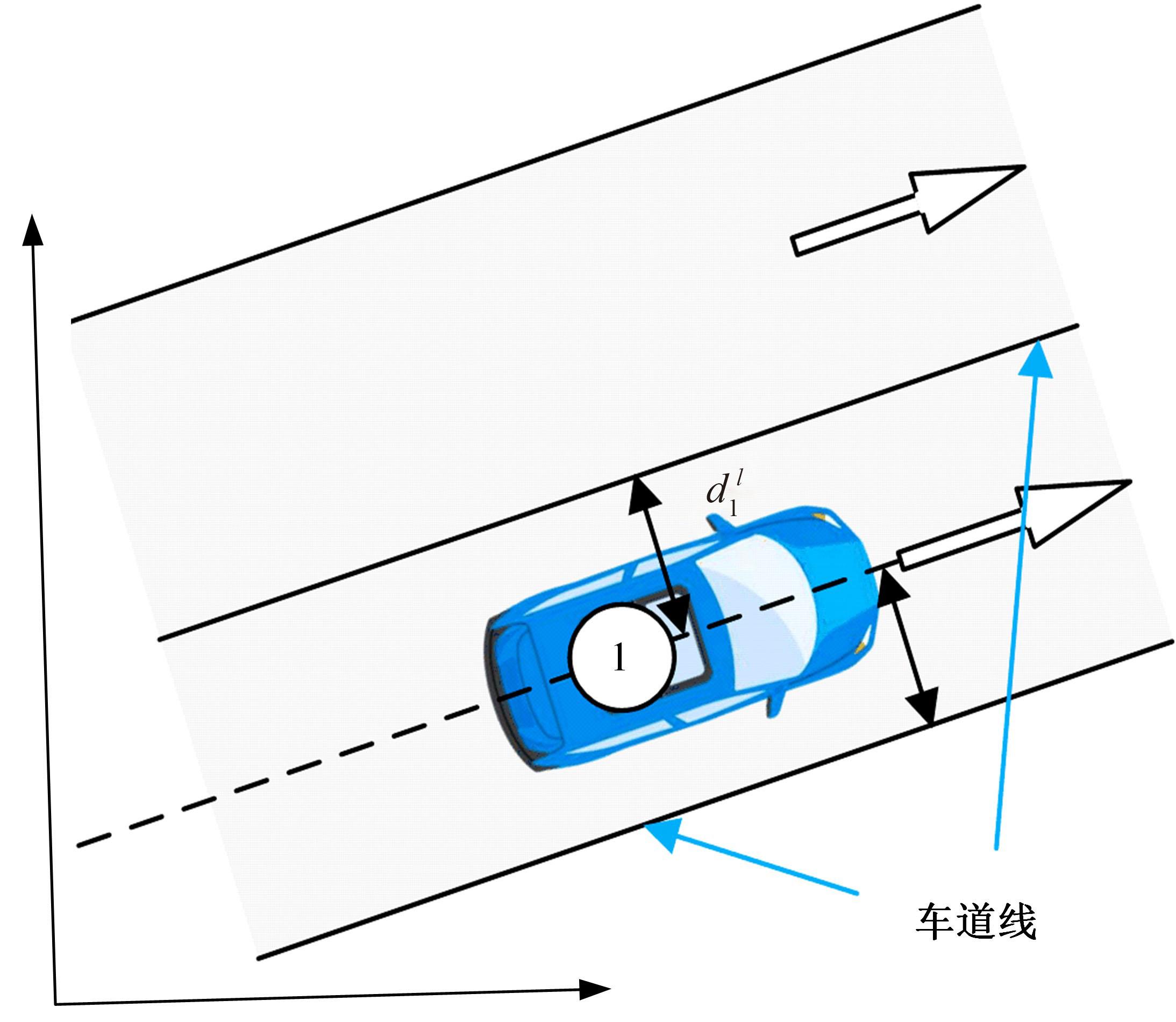
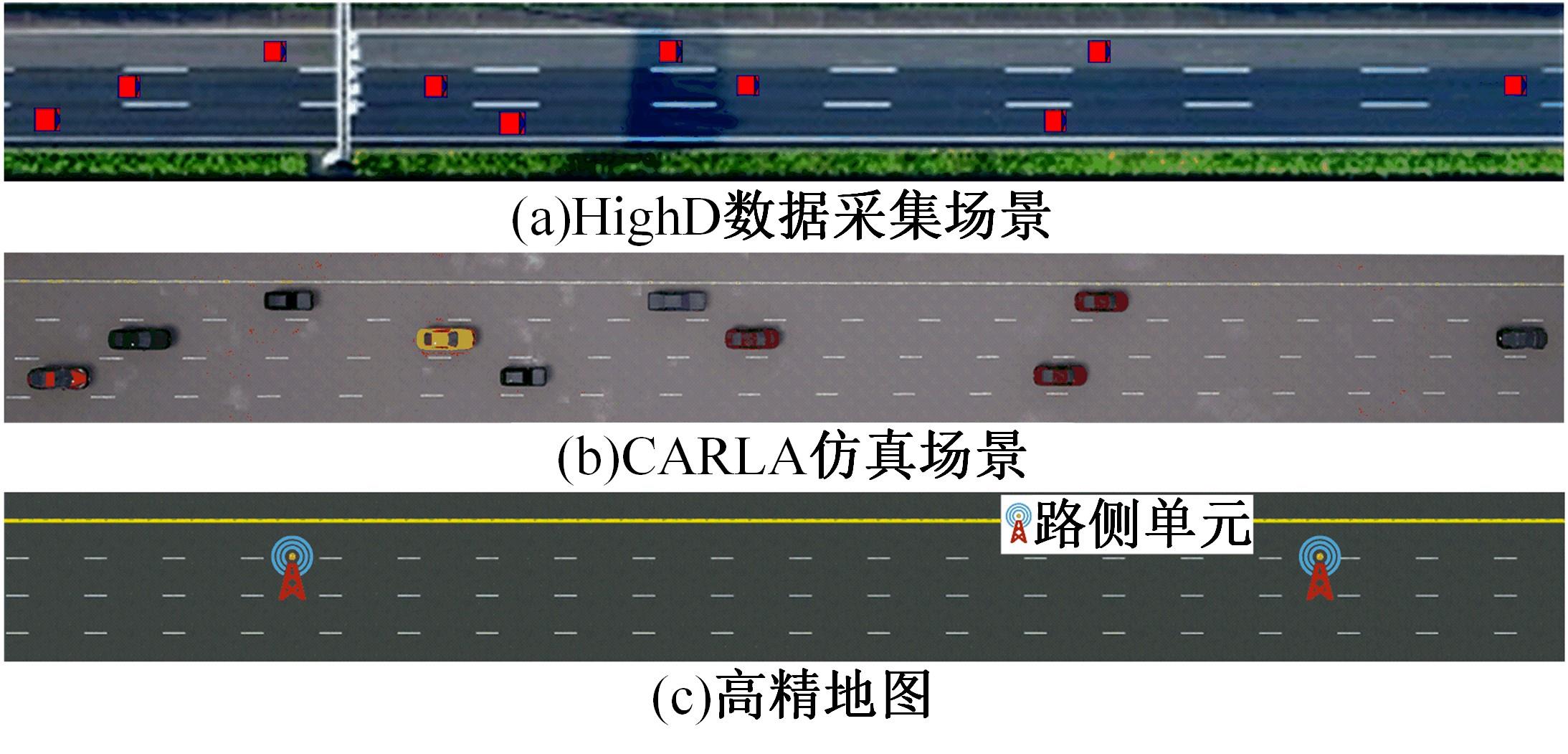
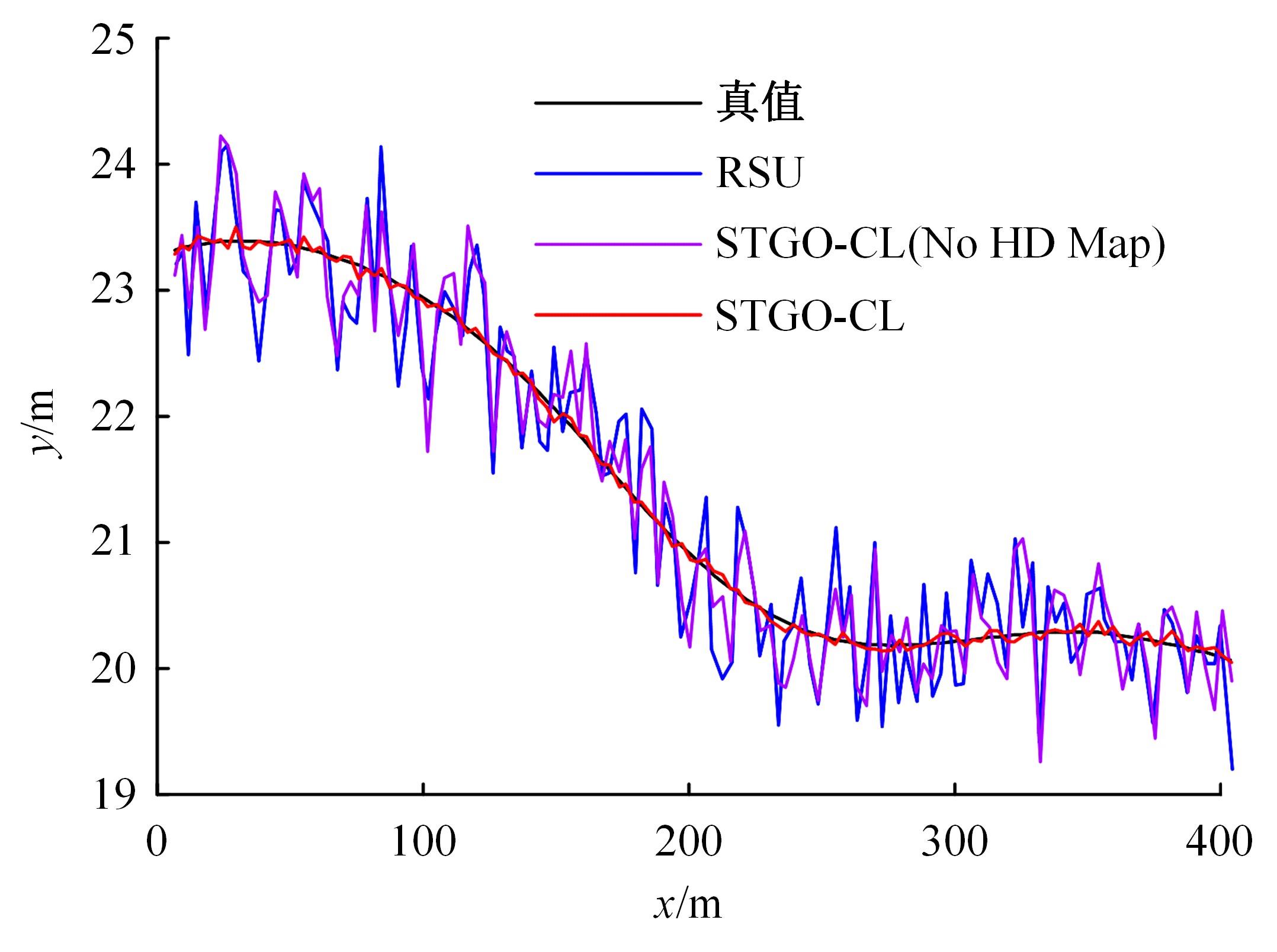
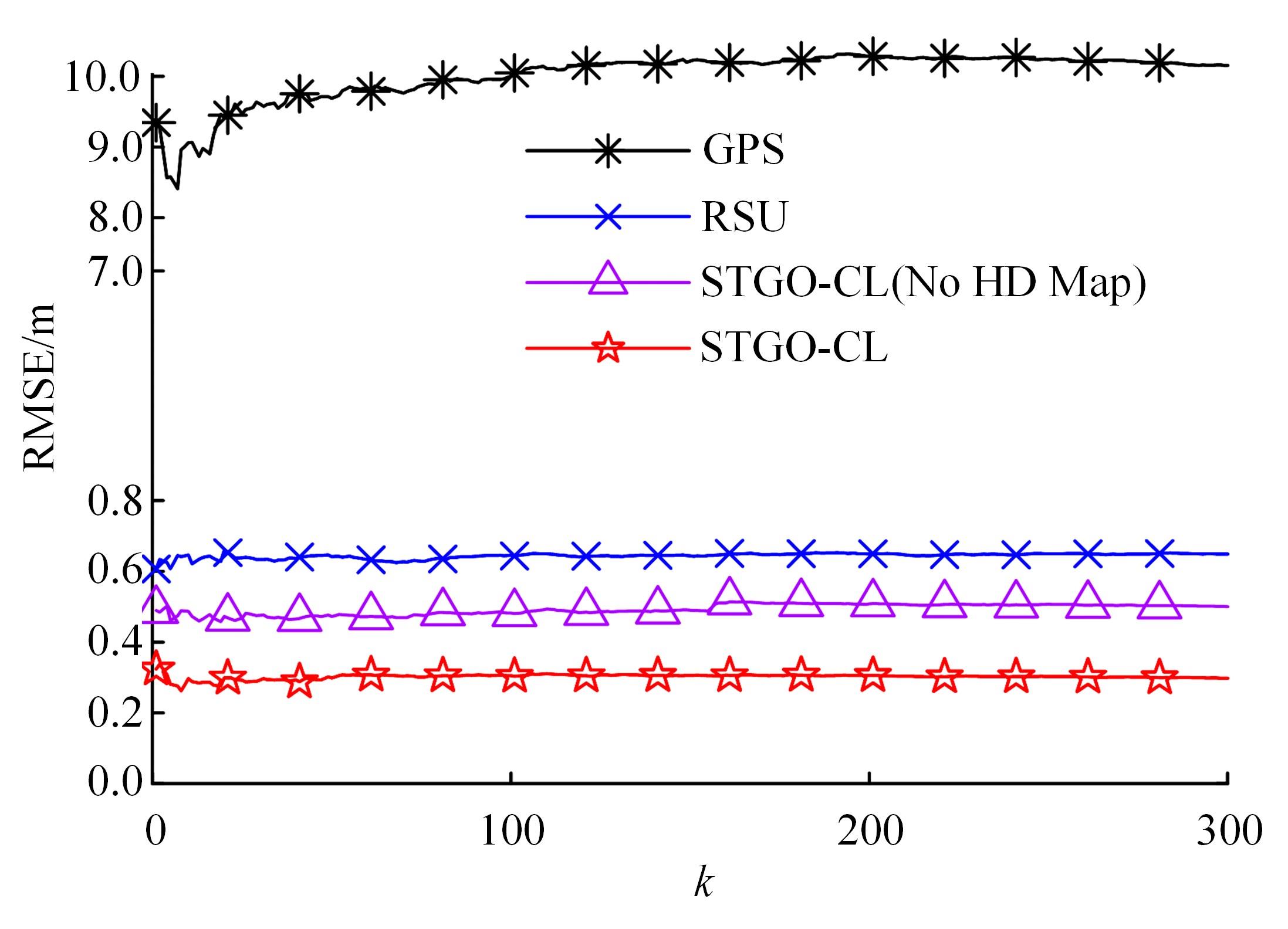
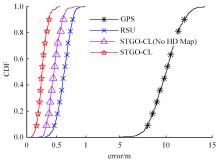
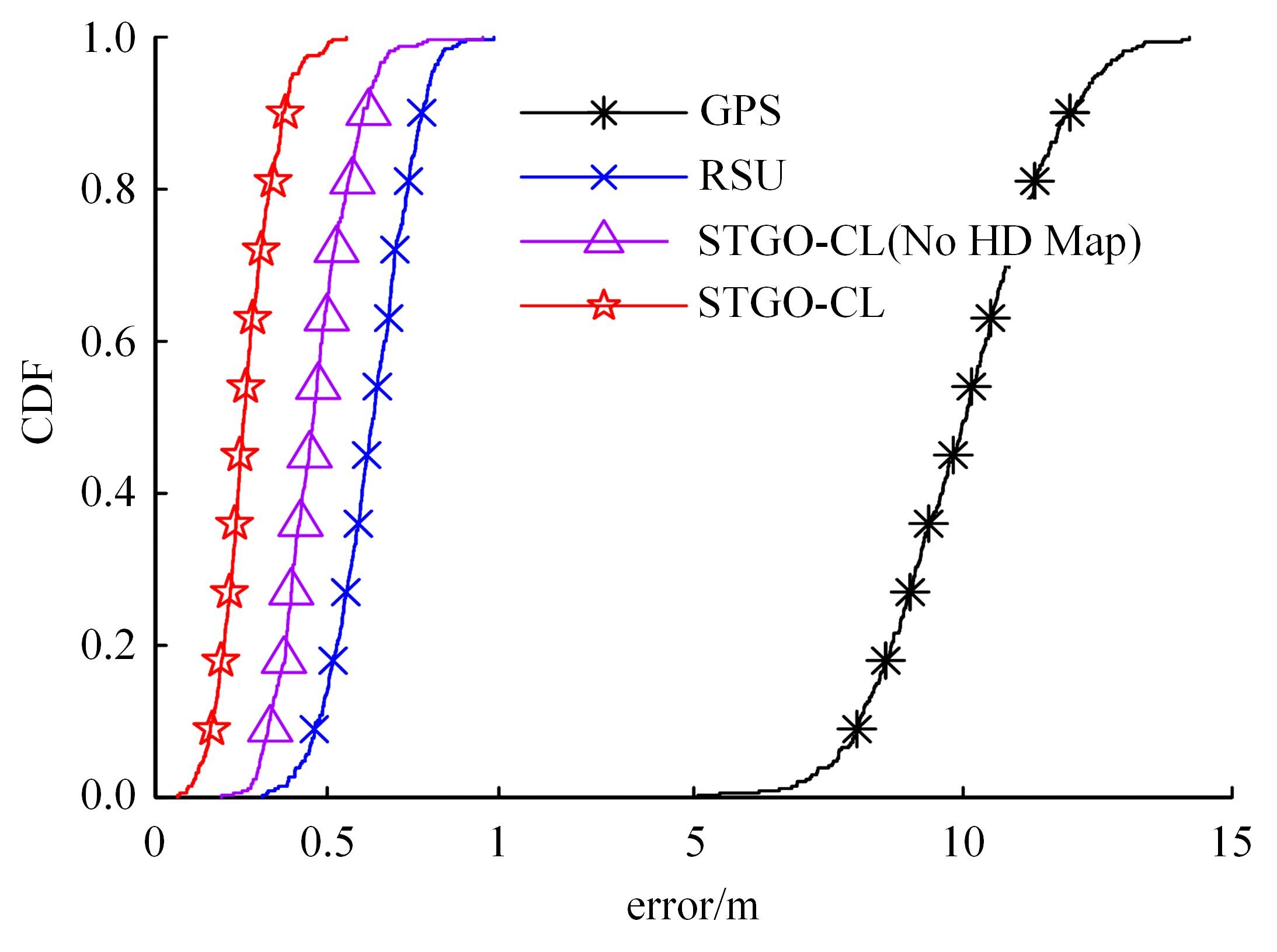
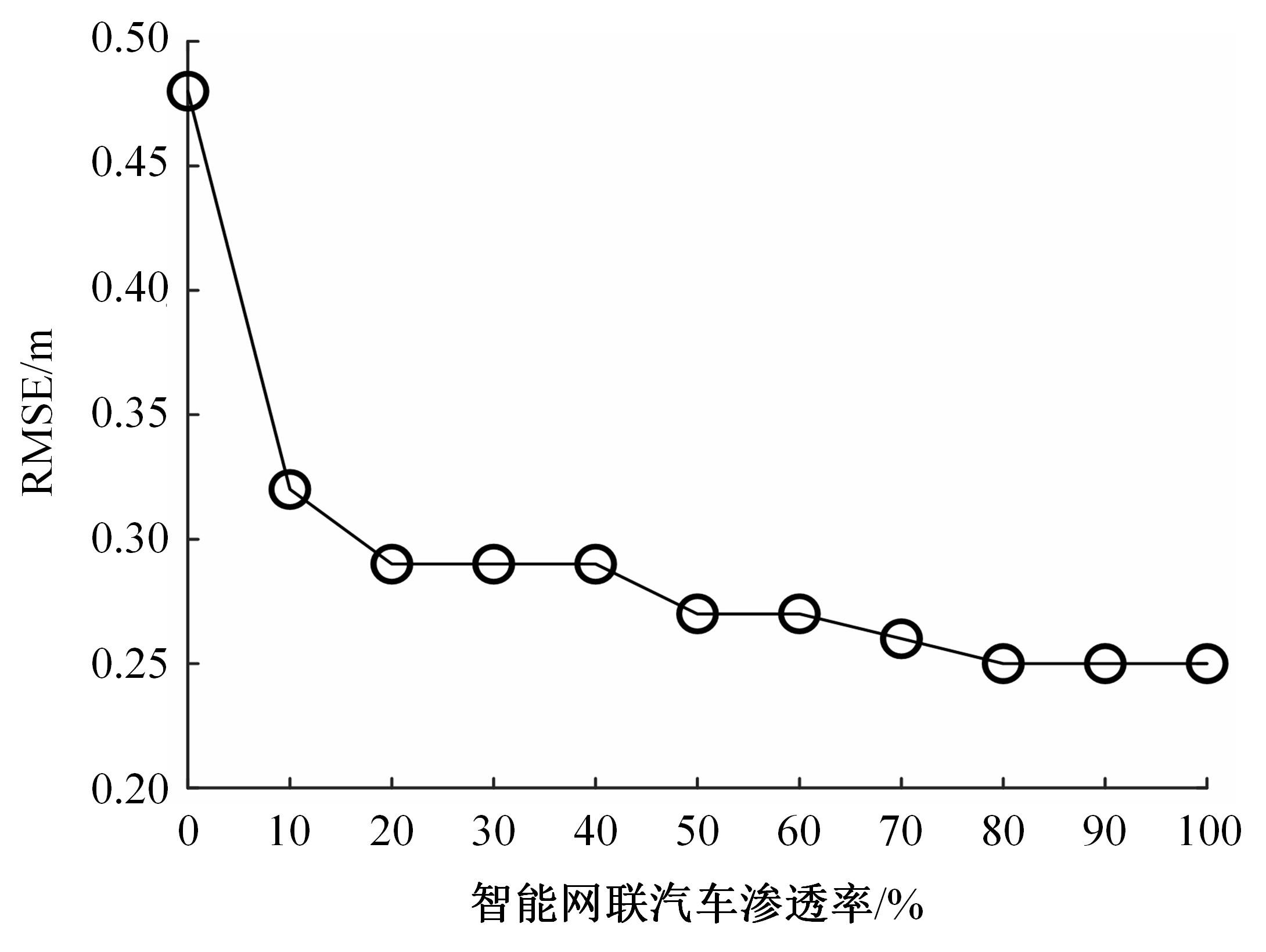
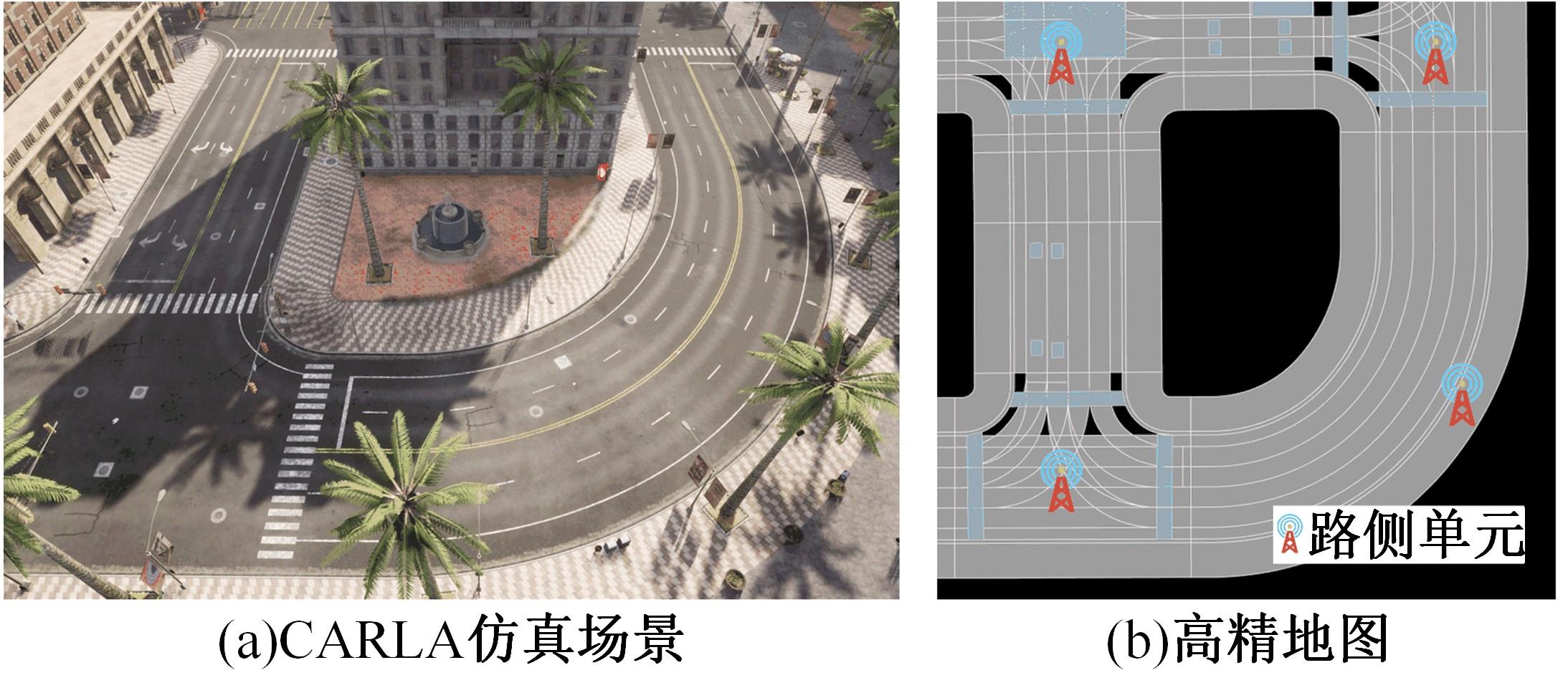
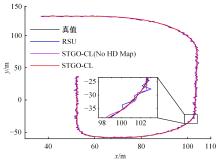
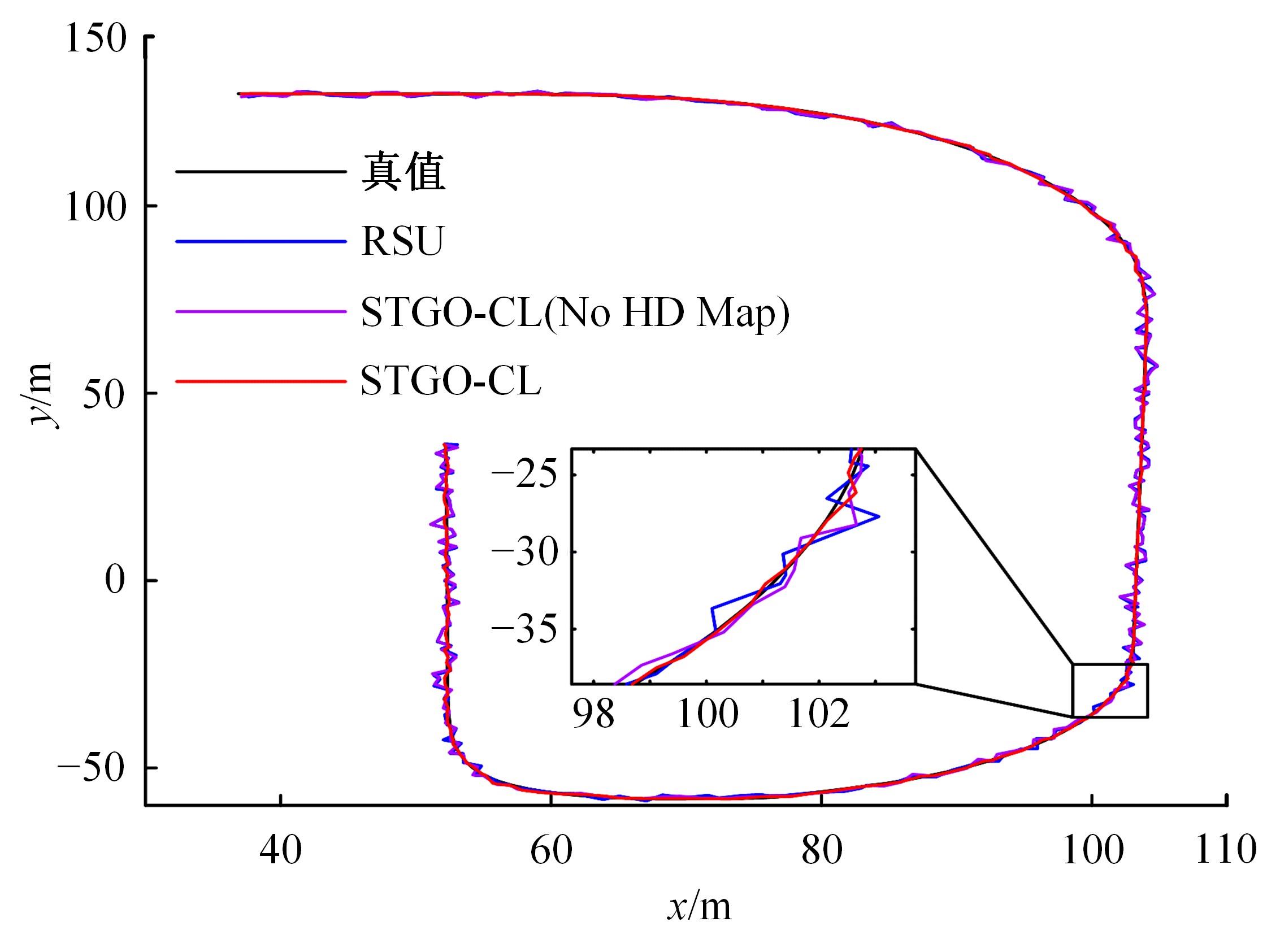
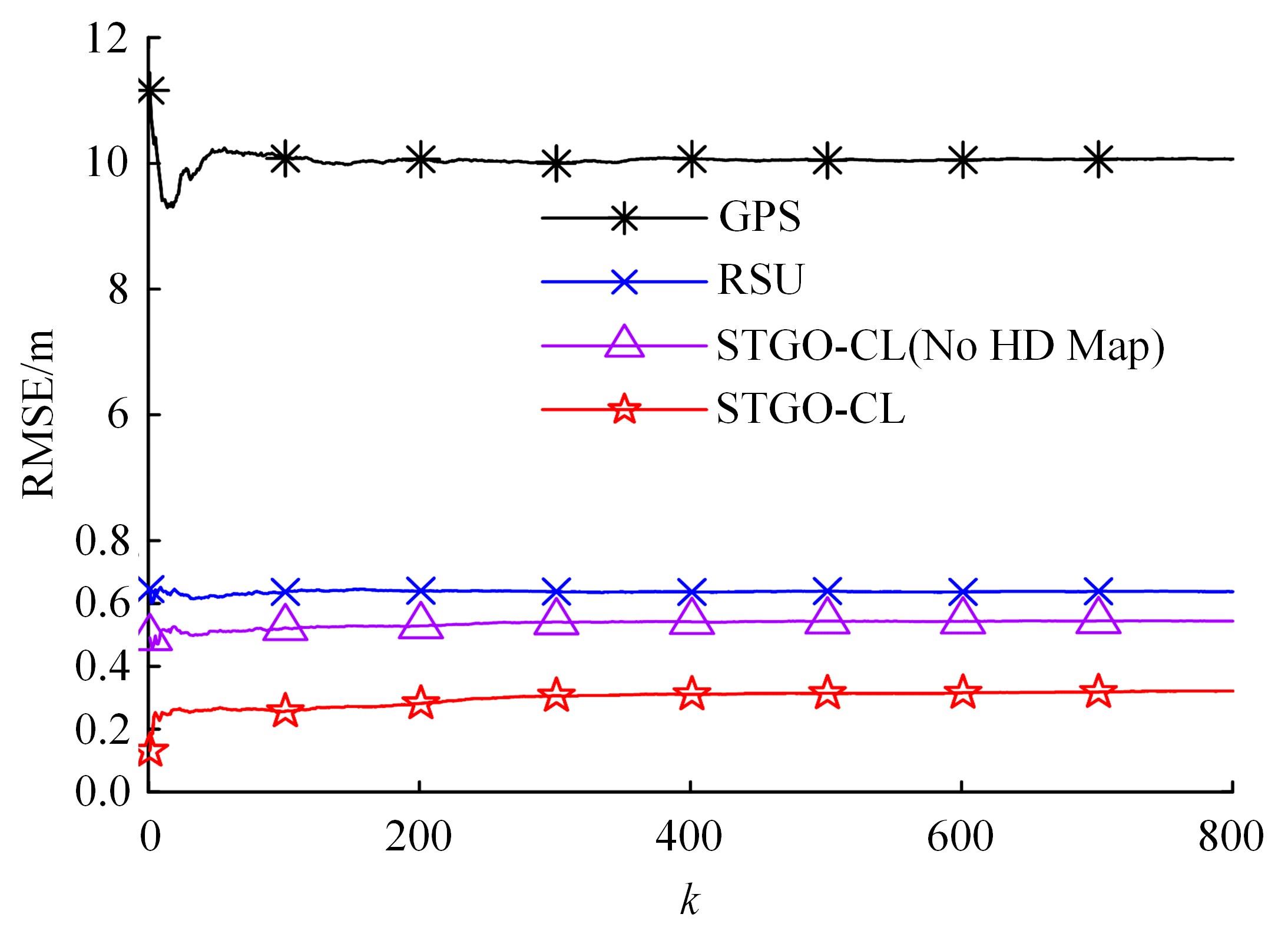
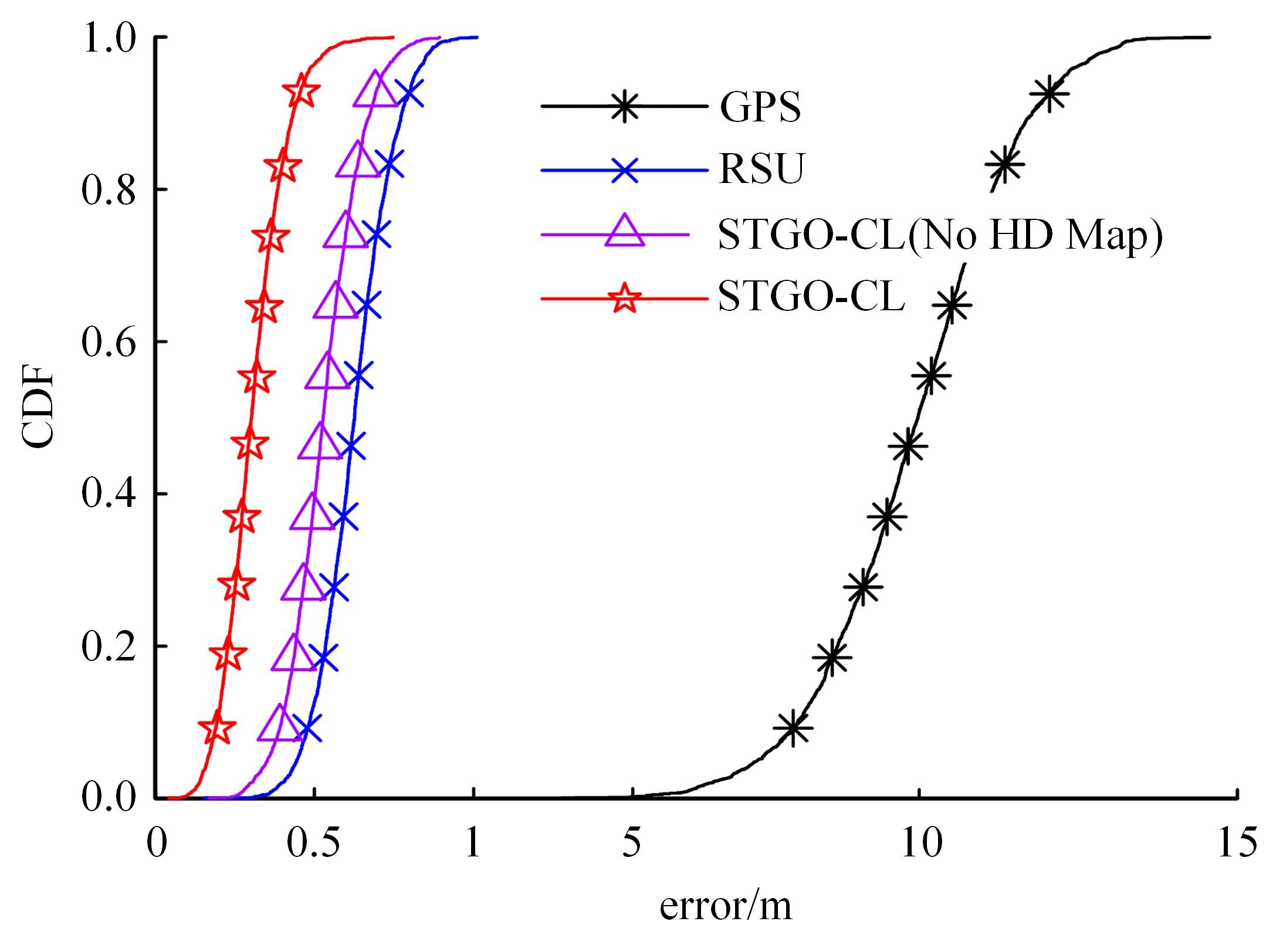
将车路协同系统中车辆的位置估计问题转化为时空图模型构建与优化问题,提出一种时空图优化协同定位(STGO-CL)方法。其中,感知区域中不同时刻的车辆位置构成图模型中的节点;车端与路端通过融合高精地图计算出来的车辆绝对位置与相对位置构成图模型的边,并加入时延补偿约束。在求解过程中采用Levenberg-Marquardt (LM)法求解目标函数实现对感知区域中的车辆位置最优状态估计,实现车-路-图协同定位。利用CARLA建立直道和弯道仿真实验场景以验证算法,结果表明:时空图优化协同定位方法平均定位误差为0.29 m,定位性能较GPS或路侧单元(Road side unit, RSU)单独定位分别提高了97.1%和55.4%,较不融合高精地图的时空图优化协同定位方法提高了42.0%。在时延补偿上,可将200 ms时延下的定位性能提高67.0%。本文利用时空图模型实现车-路-图协同定位可有效提升车路协同系统的环境感知性能。
中图分类号:
- U495





| 1 | 李寿涛, 李嘉霖, 孟庆瑜, 等. 基于点云直方图的回环检测算法和车辆定位方法[J]. 吉林大学学报:工学版, 2023, 53(8): 2395-2403. |
| Li Shou-tao, Li Jia-lin, Meng Qing-yu, et al. Loop-closure detection algorithm based on point cloud histogram and vehicle positioning method[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(8): 2395-2403. | |
| 2 | Schwarzbach P, Michler A, Tauscher P, et al. An empirical study on V2X enhanced low-cost GNSS cooperative positioning in urban environments[J]. Sensors, 2019, 19(23): 5201. |
| 3 | Zhou Z, Hu Z Z, Li N, et al. Road-pulse: pavement vibration features from accelerator to enhance intelligent vehicle localization[C]∥2021 IEEE Intelligent Vehicles Symposium(IV), Nagoya, Japan, 2021: 940-946. |
| 4 | 吴文静, 陈润超, 贾洪飞, 等. 车路协同环境下路段掉头区域车辆协同控制[J]. 吉林大学学报: 工学版, 2019, 49(4): 1100-1106. |
| Wu Wen-jing, Chen Run-chao, Jia Hong-fei, et al. Collaborative control method of vehicles in U-turn zone under environment of cooperative vehicle infrastructure system[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1100-1106. | |
| 5 | 田彬, 赵祥模, 徐志刚, 等.车路协同条件下智能网联高速公路通行效率信息自适应分发协议: NRT-V2X[J]. 中国公路学报, 2019, 32(6): 293-307. |
| Tian Bin, Zhao Xiang-mo, Xu Zhi-gang, et al. NRT-V2X: adaptive data dissemination protocol for traffic efficiency of connected and automated highways[J]. China Journal of Highway and Transport, 2019, 32(6): 293-307. | |
| 6 | 王栋民, 赵冬青, 向民志, 等. 车载分散式协同定位算法性能分析[J]. 测绘科学技术学报, 2021, 38(2): 130-135. |
| Wang Dong-min, Zhao Dong-qing, Xiang Min-zhi, et al. Performance analysis of vehicle distributed cooperative location algorithm[J]. Journal of Geomatics Science and Technology, 2021, 38 (2): 130-135. | |
| 7 | Li Y C, Hu Z Z, Cai Y F, et al. Visual map-based localization for intelligent vehicles from multi-view site matching[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(2): 1068-1079. |
| 8 | 孙宁, 闫梦如, 倪捷, 等. 基于GRI的多车协同定位研究[J]. 汽车工程, 2018, 40(4): 488-493, 499. |
| Sun Ning, Yan Meng-ru, Ni Jie, et al. A study on multi-vehicle cooperative positioning based on GRI[J]. Automotive Engineering, 2018, 40(4): 488-493, 499. | |
| 9 | 段续庭, 田大新, 王云鹏. 基于V2X通信网络的车辆协同定位增强方法[J]. 汽车工程, 2018, 40(8): 947-951, 959. |
| Duan Xu-ting, Tian Da-xin, Wang Yun-peng. Vehicle cooperative positioning enhancement method based on V2X communication networks[J]. Automotive Engineering, 2018, 40(8): 947-951, 959. | |
| 10 | Ammous M, Valaee S. Cooperative positioning in vehicular networks using angle of arrival estimation through mmWave[C]∥2020 IEEE Global Communications Conference(GLOBECOM), Taipei, China, 2020: 1-6. |
| 11 | Ma Z, Sun S L. Research on vehicle-road co-location method oriented to network slicing service and traffic video[J]. Sustainability, 2021, 13(10): 5334-5348. |
| 12 | 王玖玲, 吴韶波, 张媛利, 等.利用V2X增强GPS的协同车辆定位方法[J]. 系统仿真学报, 2019, 31(12): 2901-2906. |
| Wang Jiu-ling, Wu Shao-bo, Zhang Yuan-li, et al. Cooperative vehicle positioning method based on V2X enhanced GPS[J]. Journal of System Simulation, 2019, 31(12): 2901-2906. | |
| 13 | Gulati D, Zhang F H, Clarke D, et al. Graph based cooperative localization using symmetric measurement equations and dedicated short range communication[C]∥2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems(MFI),Daegu, Korea(South), 2017: 644-649. |
| 14 | Wang F A, Xu L W, Zhuang W C, et al. Geometry-based cooperative localization for connected vehicle subject to temporary loss of GNSS signals[J]. IEEE Sensors Journal, 2021, 21(20): 23527-23536. |
| 15 | 罗文慧, 董宝田, 王泽胜. 基于车路协同的车辆定位算法研究[J]. 西南交通大学学报, 2018, 53(5): 1072-1077, 1086. |
| Luo Wen-hui, Dong Bao-tian, Wang Ze-sheng. Algorithm based on cooperative vehicle infrastructure systems[J]. Journal of Southwest Jiaotong University, 2018, 53(5): 1072-1077, 1086. | |
| 16 | Zhang G H, Ng H F, Wen W S, et al. 3D mapping database aided GNSS based collaborative positioning using factor graph optimization[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(10): 6175-6187. |
| 17 | 张攀, 刘经南. 通用化高精地图数据模型[J]. 测绘学报, 2021, 50(11): 1432-1446. |
| Zhang Pan, Liu Jing-nan. A generalized data model of high definition maps [J]. Journal of Surveying and Mapping, 2021, 50(11): 1432-1446. | |
| 18 | Milioto A, Vizzo I, Behley J, et al. Rangenet++: fast and accurate lidar semantic segmentation[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Macau, China, 2019: 4213-4220. |
| [1] | 张惠臻,高正凯,李建强,王晨曦,潘玉彪,王成,王靖. 基于循环神经网络的城市轨道交通短时客流预测[J]. 吉林大学学报(工学版), 2023, 53(2): 430-438. |
| [2] | 李津,孙雨彤,魏小忠,焦玉玲. 考虑柔性车道设置的公交优先信号设计[J]. 吉林大学学报(工学版), 2023, 53(2): 448-456. |
| [3] | 杨志发,孙勃,樊贤俊,孙文财,田晶晶,孙宁. 车路协同背景下高速公路货车车队的能耗仿真[J]. 吉林大学学报(工学版), 2023, 53(12): 3452-3457. |
| [4] | 李文勇,马从若,胡清玮,刘承堃,廉冠,顾国斌,周旦. 基于站台容量限制和路段绿波控制的公交速度引导模型[J]. 吉林大学学报(工学版), 2023, 53(11): 3088-3103. |
| [5] | 彭涛,方锐,刘兴亮,王海玮,庞彦伟,许洪国,刘福聚,王涛. 基于典型事故场景的雪天高速换道自动驾驶策略[J]. 吉林大学学报(工学版), 2022, 52(11): 2558-2567. |
| [6] | 胡满江, 罗禹贡, 陈龙, 李克强. 基于纵向频响特性的整车质量估计[J]. 吉林大学学报(工学版), 2018, 48(4): 977-983. |
| [7] | 徐洪峰, 高霜霜, 郑启明, 章琨. 信号控制交叉口的复合动态车道管理方法[J]. 吉林大学学报(工学版), 2018, 48(2): 430-439. |
| [8] | 王海玮, 温惠英, 刘敏. 夜间环境驾驶员精神负荷的生理特性评估与实验[J]. 吉林大学学报(工学版), 2017, 47(2): 420-428. |
| [9] | 姜桂艳, 刘彬, 隋晓艳, 马明芳. 基于IC卡收费系统的公交客流信息实时采集方法[J]. 吉林大学学报(工学版), 2016, 46(4): 1076-1082. |
| [10] | 宗芳, 王占中, 贾洪飞, 焦玉玲, 吴杨. 基于支持向量机的通勤日活动-出行持续时间预测[J]. 吉林大学学报(工学版), 2016, 46(2): 406-411. |
| [11] | 李世武, 徐艺, 孙文财, 王琳虹, 郭梦竹, 柴萌. 基于瞳孔直径的撞固定物冲突自反馈识别方法[J]. 吉林大学学报(工学版), 2016, 46(2): 418-425. |
| [12] | 潘义勇, 马健霄, 孙璐. 基于可靠度的动态随机交通网络耗时最优路径[J]. 吉林大学学报(工学版), 2016, 46(2): 412-417. |
| [13] | 赵淑芝, 梁士栋, 马明辉, 刘华胜, 朱永刚. 信号交叉口实时排队长度估计[J]. 吉林大学学报(工学版), 2016, 46(1): 85-91. |
| [14] | 刘华胜,赵淑芝,朱永刚,李晓玉. 基于有效路径的轨道交通接运线路设计模型[J]. 吉林大学学报(工学版), 2015, 45(2): 371-378. |
| [15] | 祝进城,肖峰,帅斌,刘晓波. 城市出租车拥挤收费[J]. 吉林大学学报(工学版), 2015, 45(1): 89-96. |
|
||