吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 2892-2901.doi: 10.13229/j.cnki.jdxbgxb.20250446
• 车辆工程·机械工程 • 上一篇
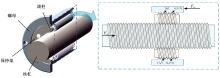
行星滚柱丝杠滚滑运动机理分析及试验
刘志峰1,2( ),李伟宁1,齐宝宝1,2,3(),陈传海1,2,3,侍威4,张兆晶4,谭晓庆5,邬昌军6
),李伟宁1,齐宝宝1,2,3(),陈传海1,2,3,侍威4,张兆晶4,谭晓庆5,邬昌军6
- 1.吉林大学 数控装备可靠性教育部重点实验室,长春 130022
2.吉林大学 吉林省高端数控装备先进制造与智能技术重点实验室,长春 130022
3.吉林大学 重庆研究院,重庆 401120
4.北京精密机电控制设备研究所,北京 100076
5.陕西汉江机床有限公司,陕西 汉中 723003
6.郑州轻工业大学 机电工程学院,郑州 450002
Mechanism analysis and experimental of rolling⁃sliding motion in planetary roller screw
Zhi-feng LIU1,2(),Wei-ning LI1,Bao-bao QI1,2,3(),Chuan-hai CHEN1,2,3,Wei SHI4,Zhao-jing ZHANG4,Xiao-qing TAN5,Chang-jun WU6
- 1.Key Laboratory of CNC Equipment Reliability,Ministry of Education,Jilin University,Changchun 130022,China
2.Jilin Key Laboratory of Advanced Manufacturing and Intelligent Technology for High-end CNC Equipment,Changchun 130022,China
3.Chongqing Research Institute,Jilin University,Chongqing 401120,China
4.Beijing Research Institute of Precise Electro Mechanicals and Controls,Beijing 100076,China
5.Shaanxi Hanjiang Machine Tool Co. ,Hanzhong 723003,China
6.College of Mechanical and Electrical Engineering,Zhengzhou University of Light Industry,Zhengzhou 450002,China
摘要:
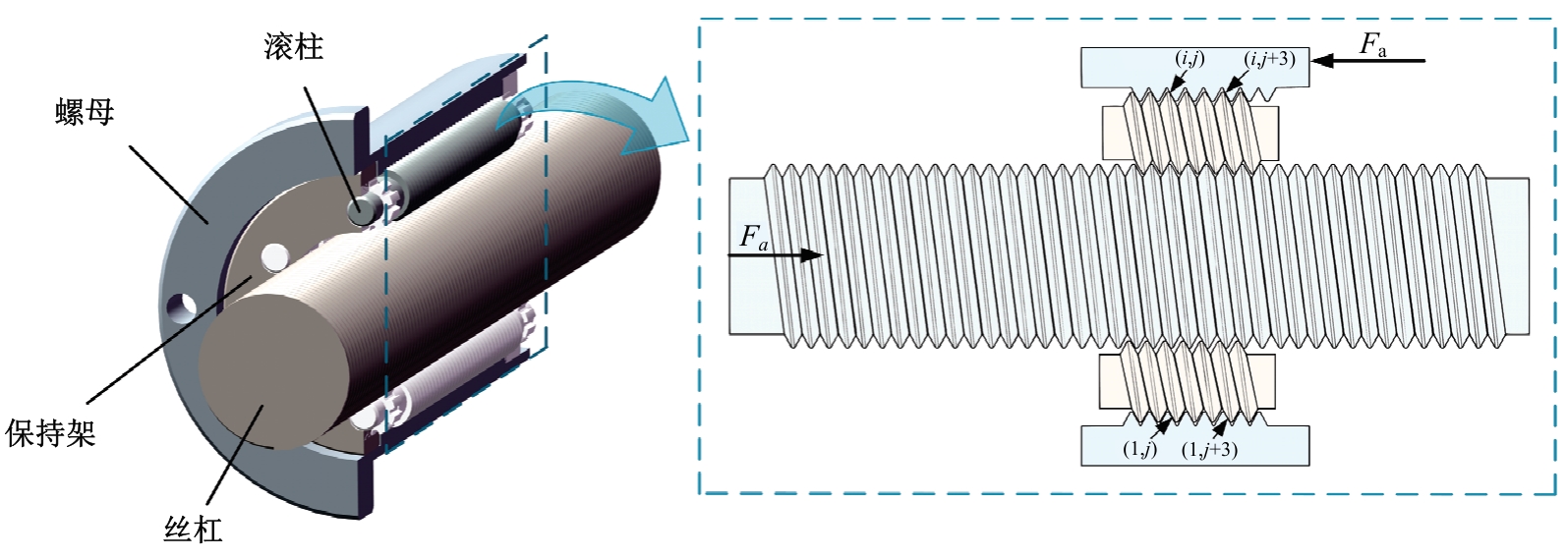
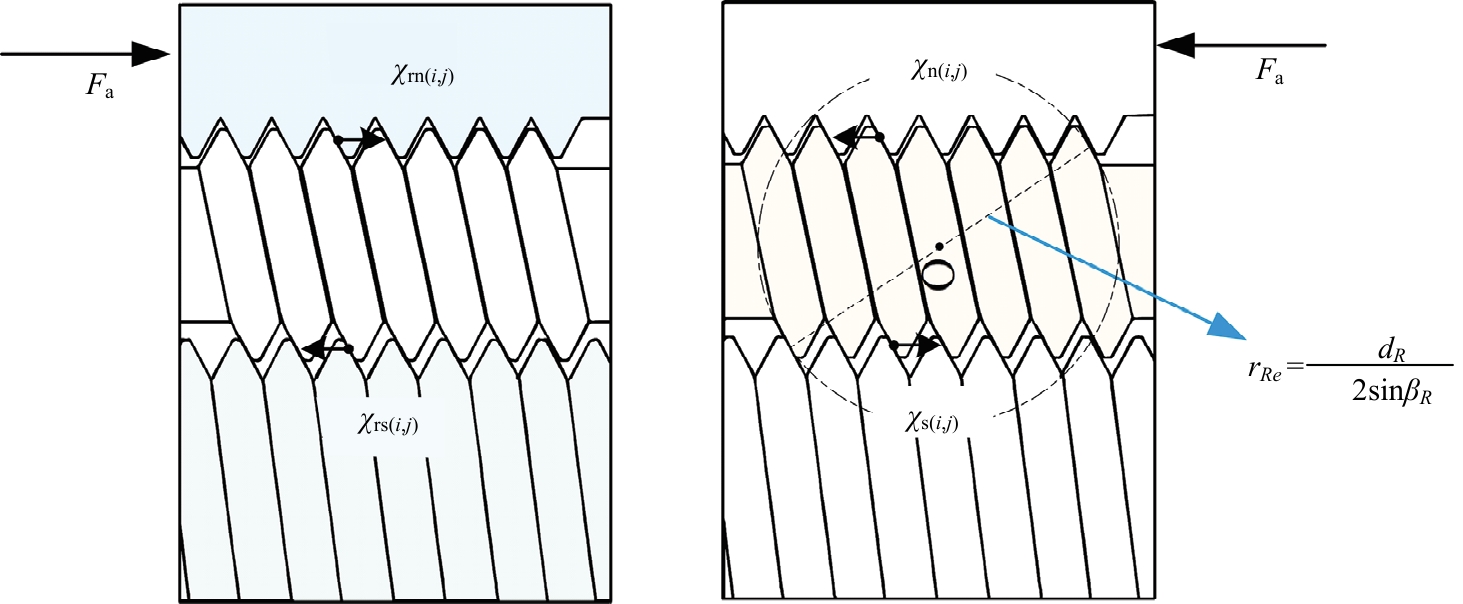
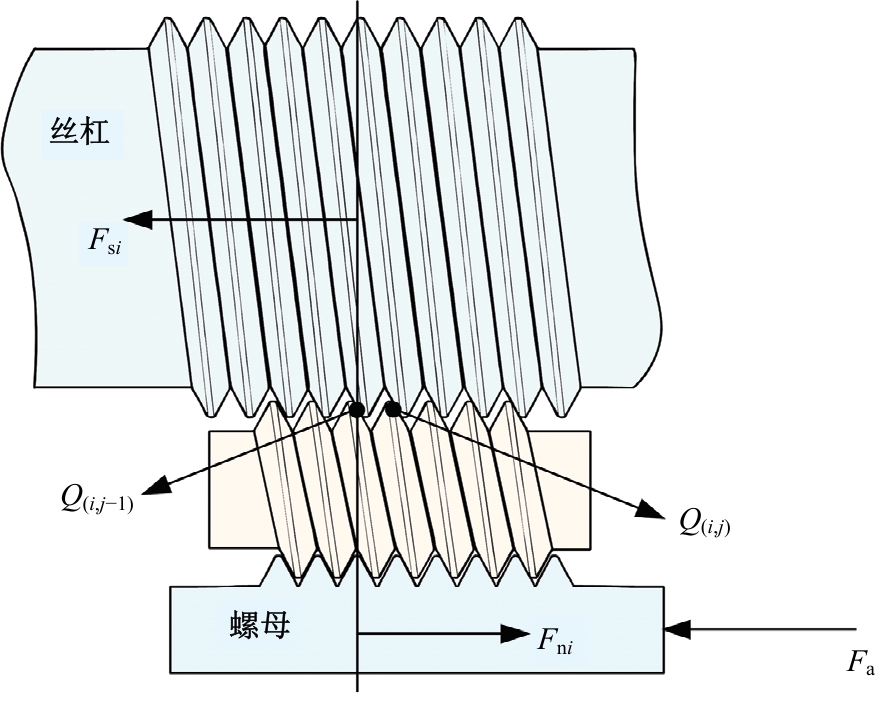
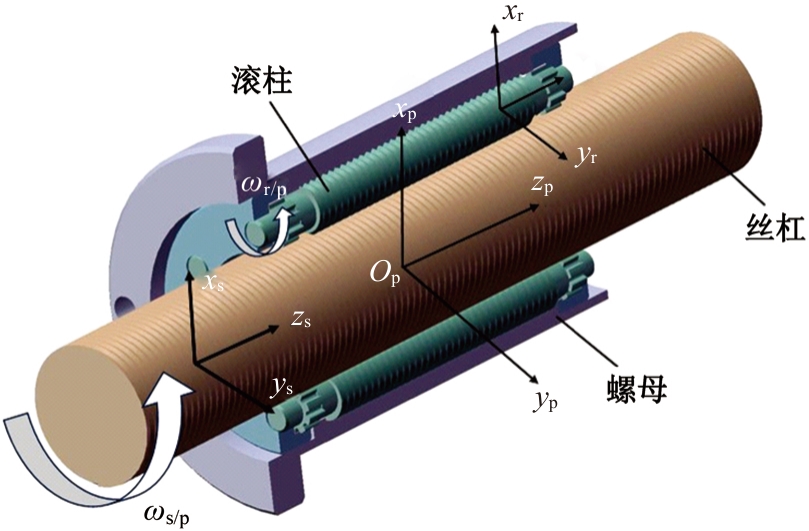
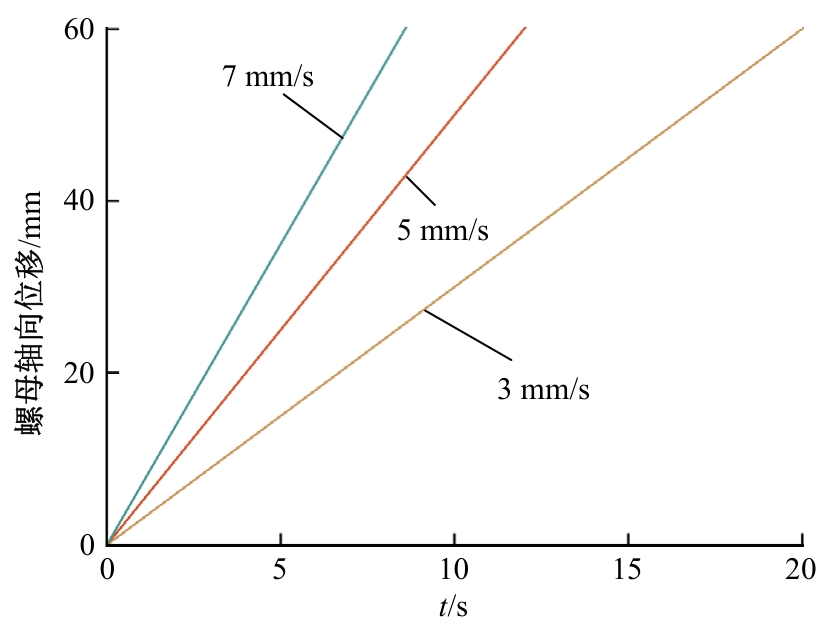
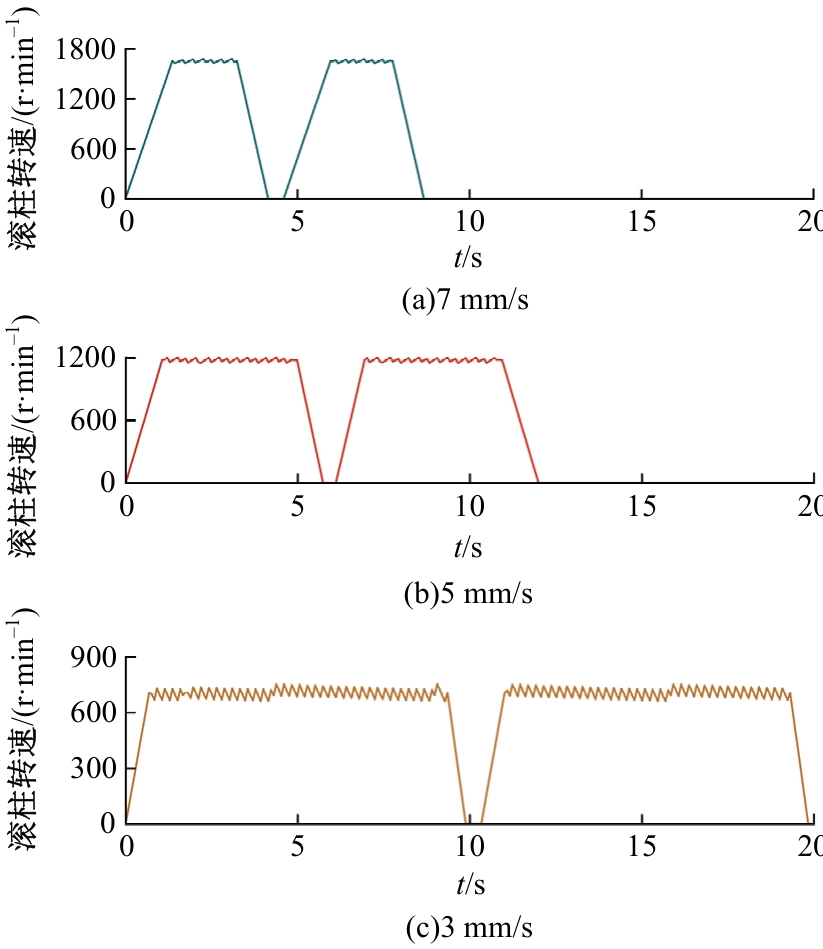
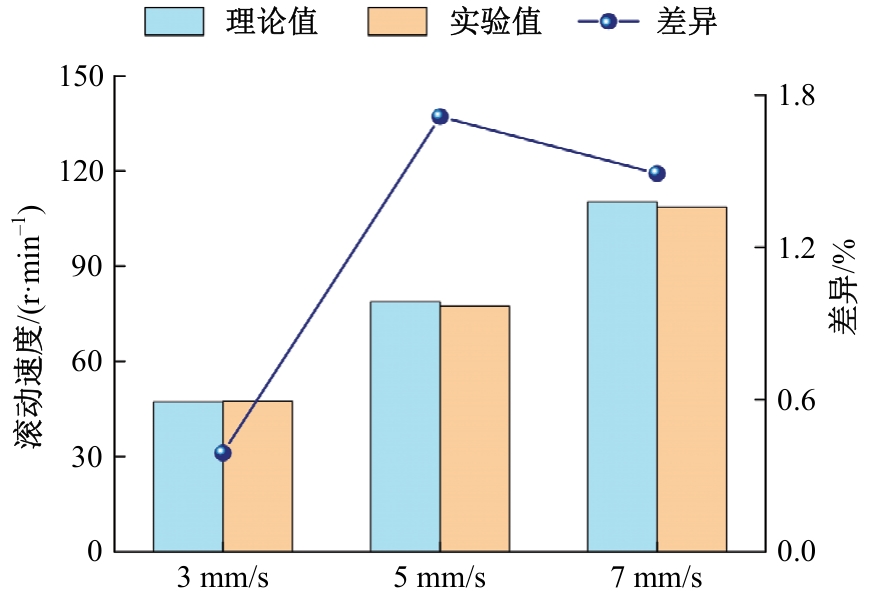
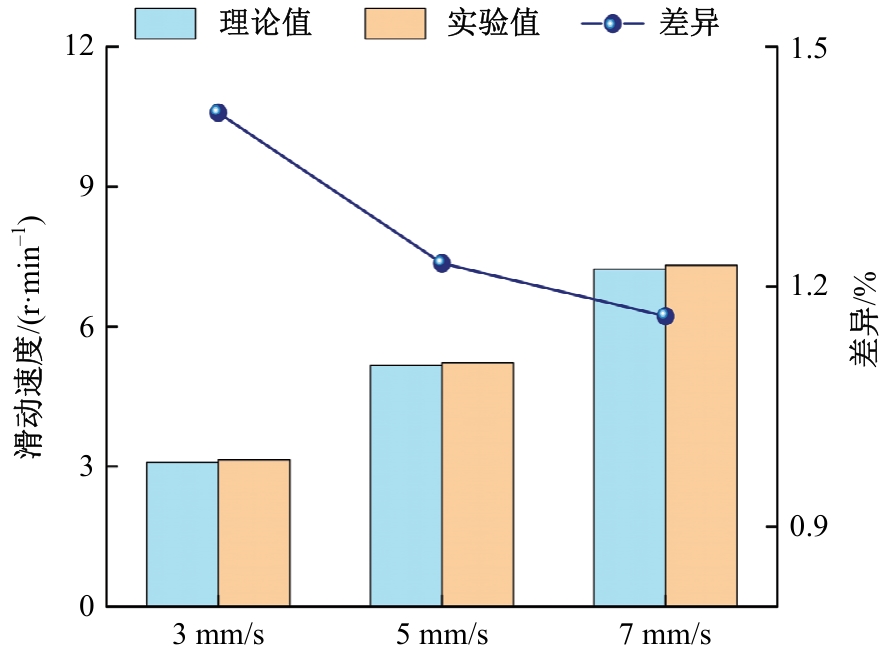
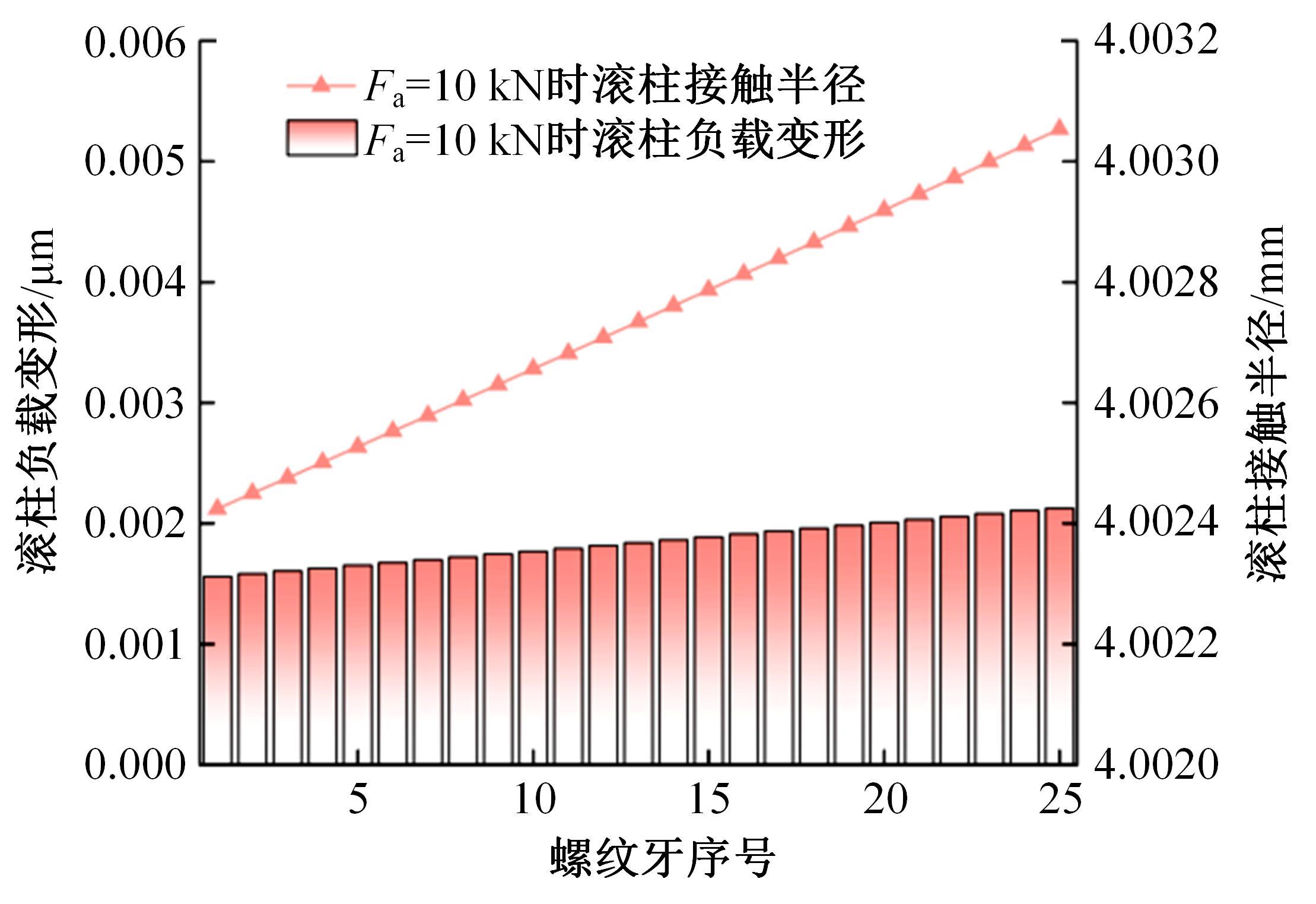
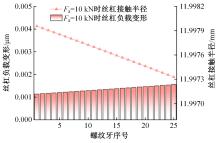
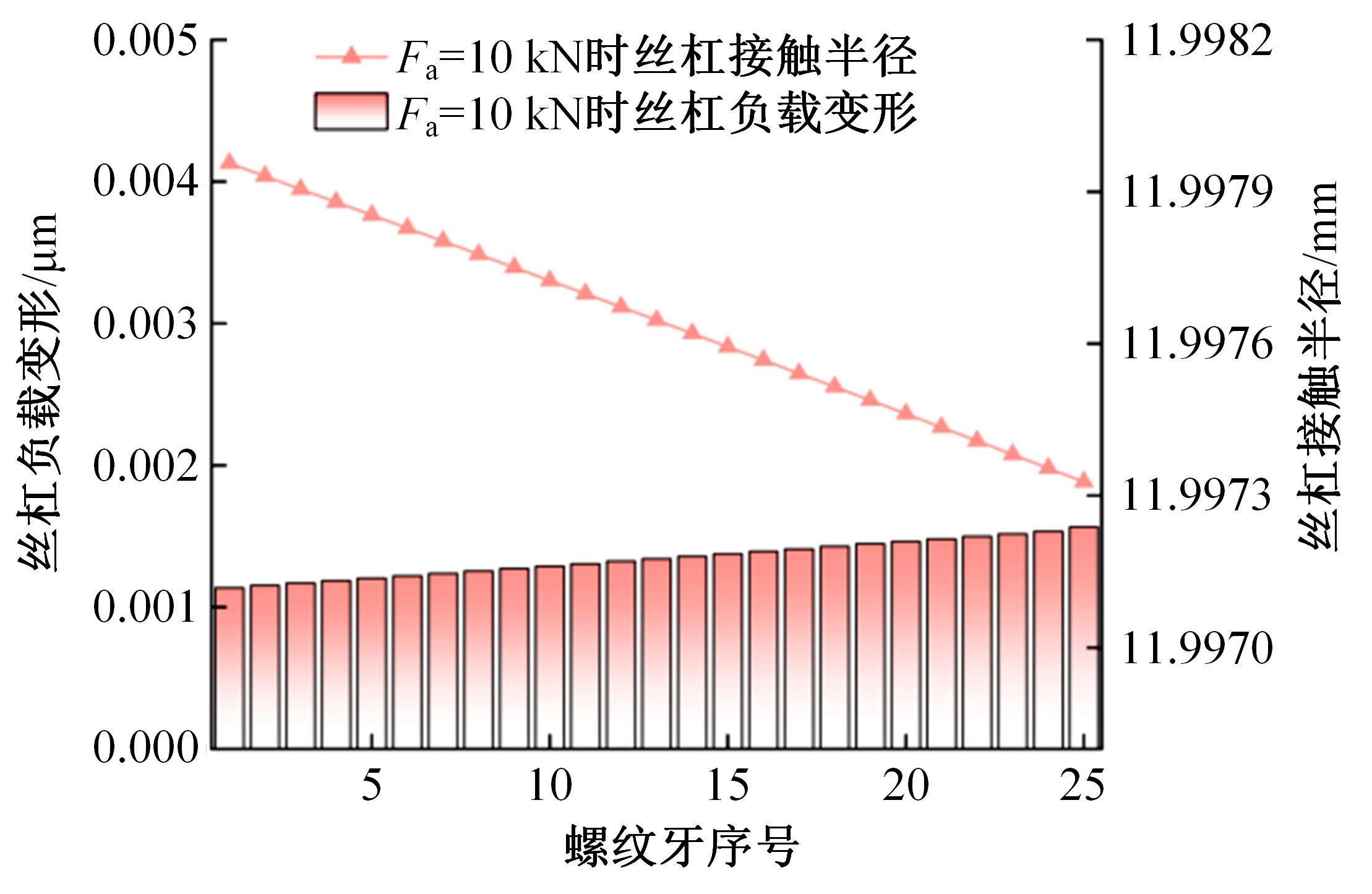
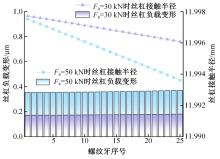
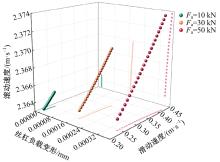
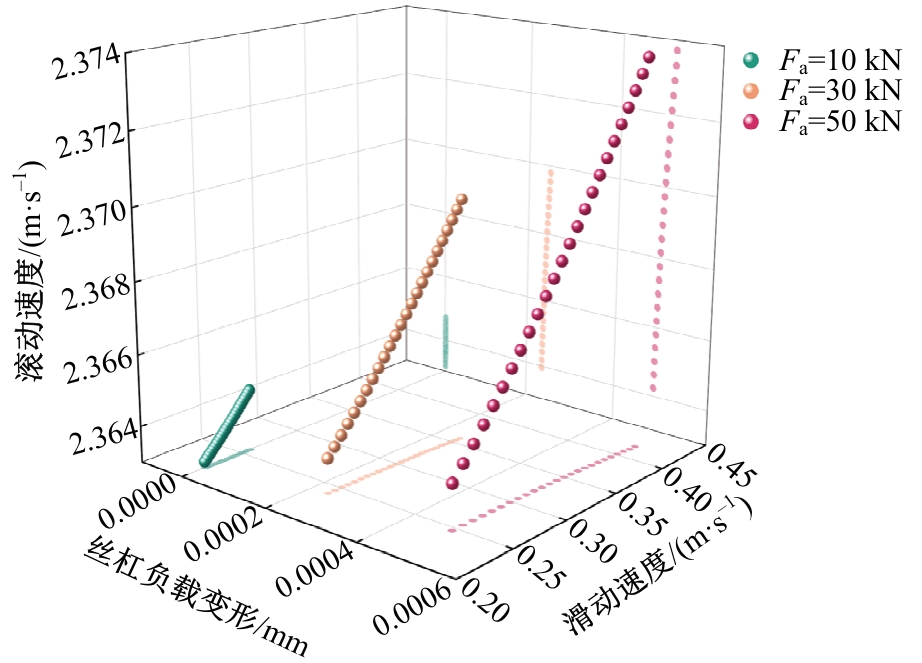
在考虑负载变形对接触状态影响的基础上,建立了虑及螺纹副负载变形的行星滚柱丝杠滚滑运动学模型,提出了基于运动协调条件的滚滑机理分析方法。依托滚柱丝杠运动特性试验平台,试验验证了滚滑运动机理分析模型,并量化揭示了滚动-滑动耦合运动机理。研究表明:轴向载荷的增加会显著加剧螺纹副的负载变形,导致滚动速度分量平均增大0.106%的同时滑动速度激增19.012%,从而使得滚滑性能下降,摩擦磨损加剧,进而影响滚柱丝杠的使用寿命。本研究揭示了行星滚柱丝杠的滚动-滑动耦合作用机制,为开展行星滚柱丝杠的结构优化与增滚降滑调控提供了理论依据与数据支撑,对提升其传动性能具有借鉴意义与参考价值。
中图分类号:
- TH132.1




| [1] | 吴林萍, 马尚君, 许千斤, 等. 考虑弹性变形的行星滚柱丝杠接触特性[J]. 机械工程学报,2024, 60(5): 130-141. |
| Wu Lin-ping, Ma Shang-jun, Xu Qian-jin, et al. Contact characteristics of planetary roller screw mechanism considering elastic deformation[J]. Journal of Mechanical Engineering, 2024, 60(5): 130-141. | |
| [2] | 王明昊, 汪满新. 一种新型五自由度混联机器人动力学建模与性能评价[J]. 机械工程学报, 2023, 59(9): 63-75. |
| Wang Ming-hao, Wang Man-xin. Dynamic modeling and performance evaluation of a new Five-DOF hybrid robot[J]. Journal of Mechanical Engineering, 2023, 59(9): 63-75. | |
| [3] | 聂建军, 侯军凯, 解晓琳, 等. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报: 工学版,2024, 54(2): 356-364. |
| Nie Jian-jun, Hou Jun-kai, Xie Xiao-lin, et al. Design and obstacle surmounting performance analysis of a novel mobile chassis for inspection robot[J]. Journal of Jilin University (Engineering and Technology Edition), 2024, 54(2): 356-364. | |
| [4] | 乔冠, 刘更, 马尚君. 行星滚柱丝杠副主曲率计算与接触特性分析[J]. 机械工程学报, 2020, 56(21): 140-148. |
| Qiao Guan, Liu Geng, Ma Shang-jun. Principal curvature calculation and contact characteristics analysis of the planetary roller screw mechanism[J]. Journal of Mechanical Engineering, 2020, 56(21): 140-148. | |
| [5] | 付晓军, 刘更, 马尚君, 等. 行星滚柱丝杠副螺旋曲面啮合机理研究[J]. 机械工程学报,2016, 52(3): 26-33. |
| Fu Xiao-jun, Liu Geng, Ma Shang-jun, et al. Studies on meshing mechanism of helical surfaces in planetary roller screw mechanism[J]. Journal of Mechanical Engineering, 2016, 52(3): 26-33. | |
| [6] | 佟瑞庭, 刘更, 史佑民, 等. 螺纹牙型角对行星滚柱丝杠副接触特性影响研究[J]. 机械设计, 2016, 33(5): 31-34. |
| Tong Rui-ting, Liu Geng, Shi You-min, et al. Studies on the effect of the thread vertex on the contact characteristics of planetary roller screw mechanism[J]. Journal of Machine Design, 2016, 33(5): 31-34. | |
| [7] | 刘阔, 宋磊, 陈虎, 等. 机理驱动的数控机床进给轴时变误差建模和补偿方法[J]. 机械工程学报,2022, 58(3): 251-258. |
| Liu Kuo, Song Lei, Chen Hu. Mechanism-driven method for time-varying error modeling and compensation of cnc machine tool´s feed axes[J]. Journal of Mechanical Engineering, 2022, 58(3): 251-258. | |
| [8] | 马尚君, 刘更, 付晓军, 等. 考虑误差的行星滚柱丝杠副滚柱承载分布[J]. 哈尔滨工业大学学报, 2015, 47(7): 98-102. |
| Ma Shang-jun, Liu Geng, Fu Xiao-jun, et al. Load distribution of rollers considering errors in planetary roller screw mechanism[J]. Journal of Harbin Institute of Technology, 2015, 47(7): 98-102. | |
| [9] | 张文杰, 刘更, 马尚君, 等. 不同安装方式下行星滚柱丝杠副载荷分布研究[J]. 西北工业大学学报,2015, 33(2): 229-236. |
| Zhang Wen-jie, Liu Geng, Ma Shang-jun, et al. Load distribution of planetary roller screw mechanism with different installations[J]. Journal of Northwestern Polytechnical University, 2015, 33(2): 229-236. | |
| [10] | 付晓军, 徐烨, 刘更, 等. 考虑滚柱偏斜的行星滚柱丝杠载荷分布计算方法[J]. 机械工程学报, 2024, 60(13): 247-256. |
| Fu Xiao-jun, Xu Ye, Liu Geng, et al. The calculation method for the load distribution in the planetary roller screw mechanism with the roller deviation[J]. Journal of Mechanical Engineering, 2024, 60(13): 247-256. | |
| [11] | 郭辉, 佟瑞庭, 刘更, 等. 面向行星滚柱丝杠副载荷均布的螺纹牙修形方法[J]. 西北工业大学学报,2018, 36(4): 685-692. |
| Guo Hui, Tong Rui-ting, Liu Geng, et al. Thread modification method for load balance on planetary roller screw mechanism[J]. Journal of Northwestern Polytechnical University, 2018, 36(4): 685-692. | |
| [12] | Abevi F, Daidie A, Chaussumier M, et al. Static load distribution and axial stiffness in a planetary roller screw mechanism[J]. Journal of Mechanical Design, 2016, 138(1):No. 012301. |
| [13] | Abevi F, Daidie A, Chaussumier M, et al. Static analysis of an inverted planetary roller screw mechanism[J].The Journal of Mechanisms and Robotics, 2016, 8(4): No.041020. |
| [14] | Jones M, Velinsky S. Stiffness of the roller screw mechanism by the direct method[J]. Mechanics Based Design of Structures and Machines, 2014, 42(1): 17-34. |
| [15] | Hojjat Y, Agheli M. A comprehensive study on capabilities and limitations of roller-screw with emphasis on slip tendency[J]. Mechanism and Machine Theory, 2009, 44(10): 1887-1899. |
| [16] | Velinsky S, Chu B, Lasky T. Kinematics and efficiency analysis of the planetary roller screw mechanism[J]. Journal of Mechanical Design, 2009, 131(1):No. 011016. |
| [17] | Sandu S, Biboulet N, Nelias D, et al. An efficient method for analyzing the roller screw thread geometry[J]. Mechanism and Machine Theory, 2018, 126: 243-264. |
| [18] | Sandu S, Biboulet N, Nelias D, et al. Analytical prediction of the geometry of contact ellipses and kinematics in a roller screw versus experimental results[J]. Mechanism and Machine Theory, 2019, 131: 115-136. |
| [19] | 马尚君, 刘更, 付晓军, 等. 考虑弹性变形的行星滚柱丝杠副滚滑特性[J]. 东南大学学报: 自然科学版, 2015, 45(3): 461-468. |
| Ma Shang-jun, Liu Geng, Fu Xiao-jun, et al. Rolling-sliding characteristics of planetary roller screw considering elastic deformation[J]. Journal of Southeast University (Natural Science Edition), 2015, 45(3): 461-468. | |
| [20] | Fu X, Liu G, Ma S, et al. A comprehensive contact analysis of planetary roller screw mechanism[J]. Journal of Mechanical Design, 2017, 139(1): No.012302. |
| [1] | 付学中,何厚冰,刘旭东,李静珍. 非正交偏置变位一体化的斜齿面齿轮齿宽设计[J]. 吉林大学学报(工学版), 2025, 55(4): 1207-1214. |
| [2] | 王淑坤,冯育泽,张景然,张心明,郑龙. 仿清道夫下唇结构除污性能分析[J]. 吉林大学学报(工学版), 2025, 55(1): 392-400. |
| [3] | 刘洋. 橡胶鞋底弹性打磨仿真及试验[J]. 吉林大学学报(工学版), 2024, 54(8): 2167-2173. |
| [4] | 王琛,雒特,惠倩倩,王忠昊,王方方. 面向分体式飞行汽车对接锁定的机电系统设计与验证[J]. 吉林大学学报(工学版), 2024, 54(8): 2130-2140. |
| [5] | 刘洋,江涛. 计及安装角的六自由度平台虎克铰干涉计算模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1519-1527. |
| [6] | 谭晓丹,王勇澎,Hall Robert,徐天爽,黄庆学. 面向电铲自主装卸的矿用自卸车斗型优化[J]. 吉林大学学报(工学版), 2024, 54(5): 1227-1236. |
| [7] | 胡斌,蔡一全,罗昕,毛自斌,李俊伟,郭孟宇,王剑. 基于种群胁迫的有限齿侧空间高速充种理论与试验[J]. 吉林大学学报(工学版), 2024, 54(2): 574-588. |
| [8] | 孙伟,杨俊. 等角贴敷压电分流片圆柱壳有限元建模及减振分析[J]. 吉林大学学报(工学版), 2024, 54(2): 365-374. |
| [9] | 刘洋. 动臂塔机防后倾缓冲力计算方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2785-2794. |
| [10] | 赵洋,肖洋,孙皓,霍文浩,冯松,廖勇. 基于围道积分的润滑接触齿轮微点蚀损伤特征模拟[J]. 吉林大学学报(工学版), 2022, 52(4): 799-810. |
| [11] | 郑伟,孙见君,马晨波,於秋萍,张玉言,牛韬. 汽车轮毂加工夹具的研究现状及展望[J]. 吉林大学学报(工学版), 2022, 52(1): 25-36. |
| [12] | 陈魏,雷雨龙,李兴忠,付尧,扈建龙,侯利国. 低速工况下渐开线圆柱直齿轮齿面粘着磨损计算[J]. 吉林大学学报(工学版), 2021, 51(5): 1628-1634. |
| [13] | 郭震,于红英,滑忠鑫,赵娣. 刚性折纸机构运动分析及折叠过程仿真[J]. 吉林大学学报(工学版), 2020, 50(1): 66-76. |
| [14] | 朱伟,王传伟,顾开荣,沈惠平,许可,汪源. 一种新型张拉整体并联机构刚度及动力学分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1777-1786. |
| [15] | 毛宇泽, 王黎钦. 鼠笼支撑一体化结构对薄壁球轴承承载性能的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1508-1514. |
|
||