吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 2935-2945.doi: 10.13229/j.cnki.jdxbgxb.20240526
• 交通运输工程·土木工程 • 上一篇
基于交通环境信息的虚拟车道线拟合方法
朱冰1( ),孟鹏翔1,刘斌2,韩嘉懿1(),赵健1,陈志成1,宋东鉴1,陶晓文1
),孟鹏翔1,刘斌2,韩嘉懿1(),赵健1,陈志成1,宋东鉴1,陶晓文1
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.中国第一汽车集团有限公司,长春 130013
Virtual lane lines fitting method based on traffic environment information
Bing ZHU1(),Peng-xiang MENG1,Bin LIU2,Jia-yi HAN1(),Jian ZHAO1,Zhi-cheng CHEN1,Dong-jian SONG1,Xiao-wen TAO1
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.China FAW Group Co. ,Ltd. ,Changchun 130013,China
摘要:
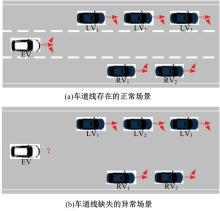
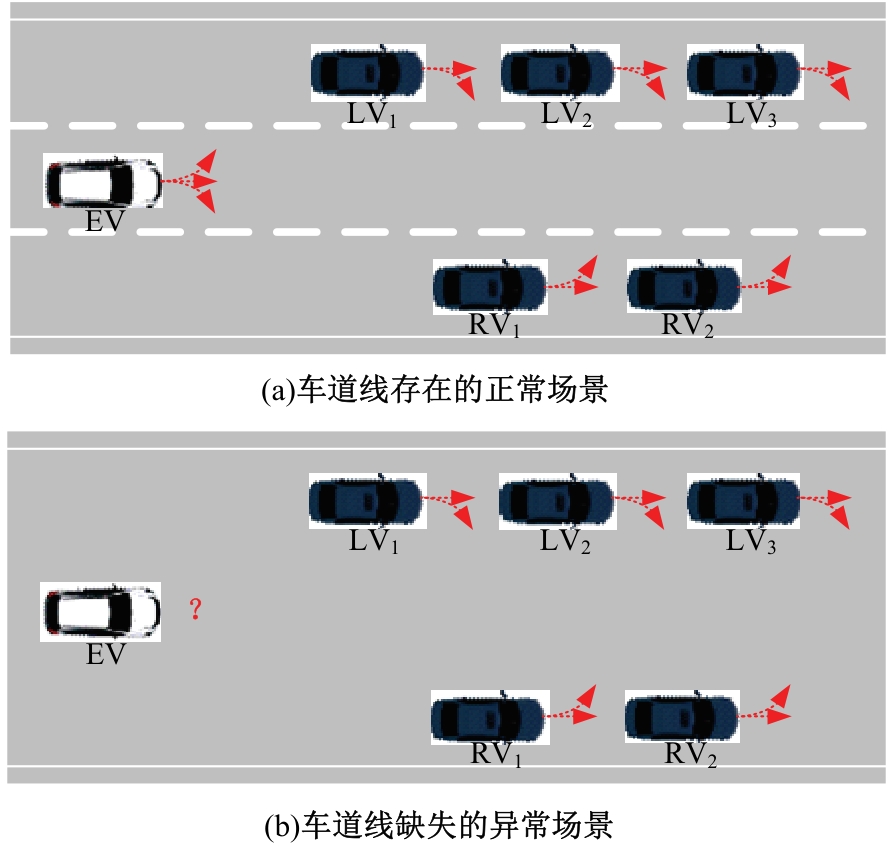
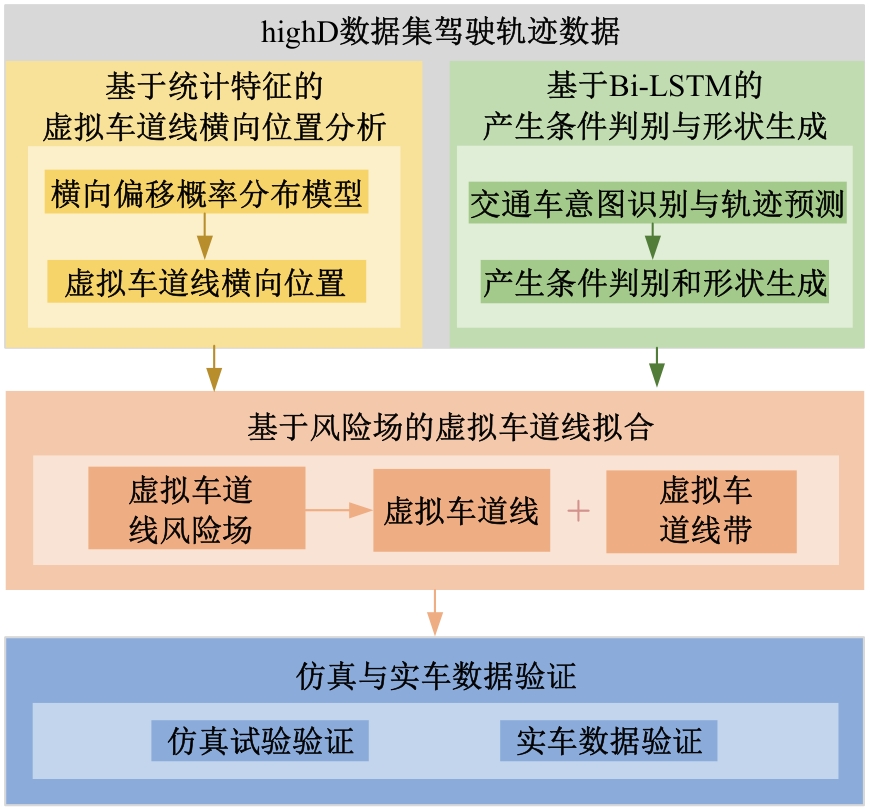
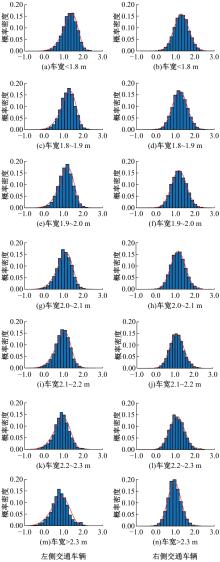
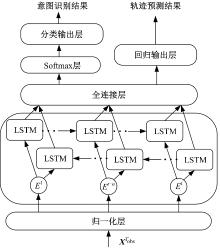
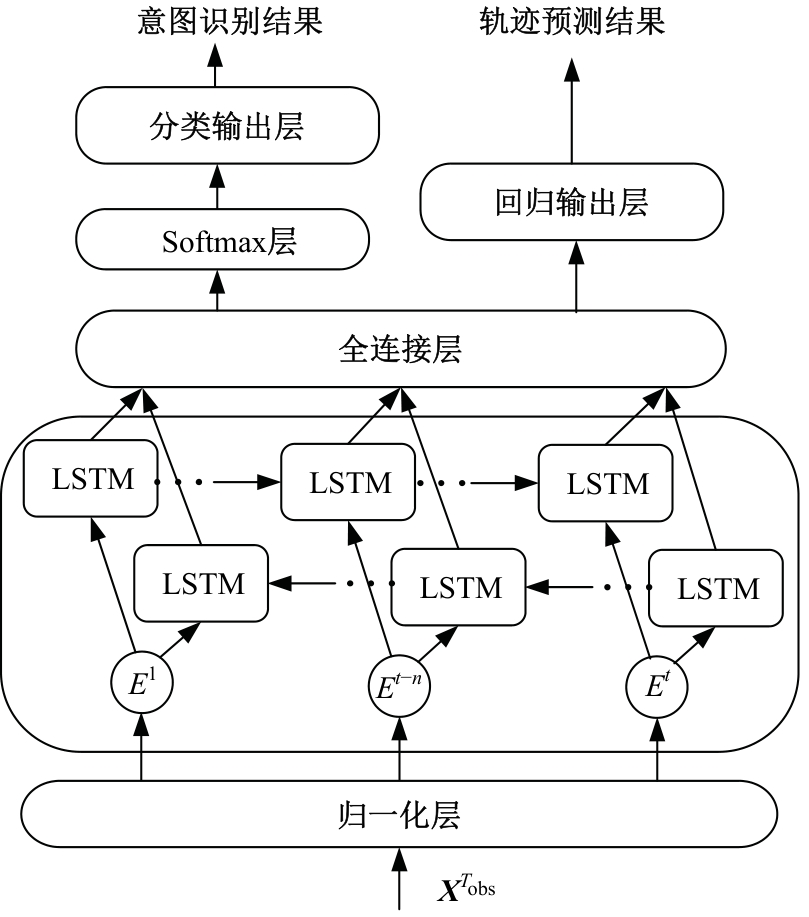
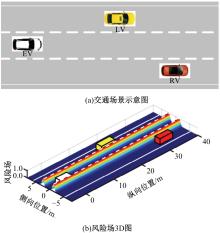
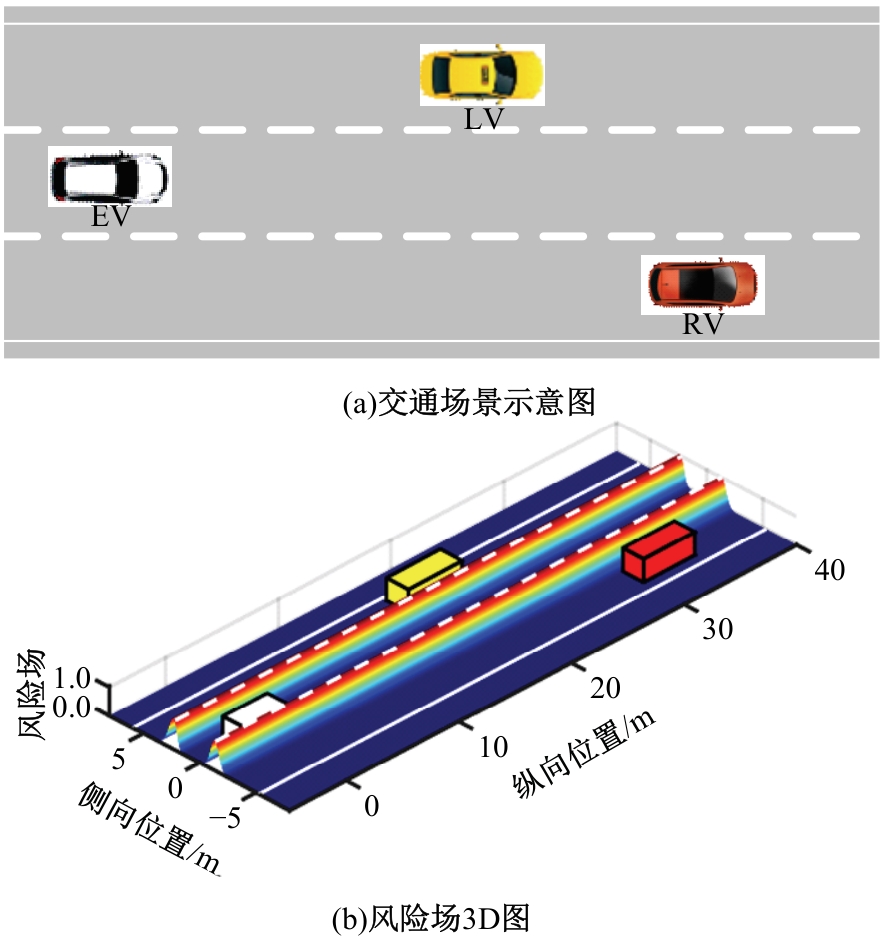
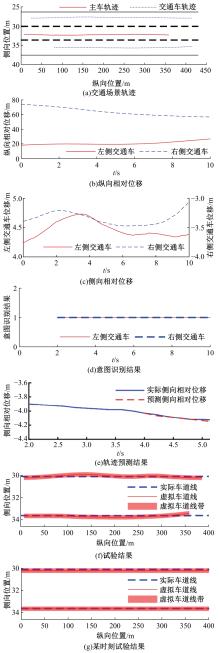
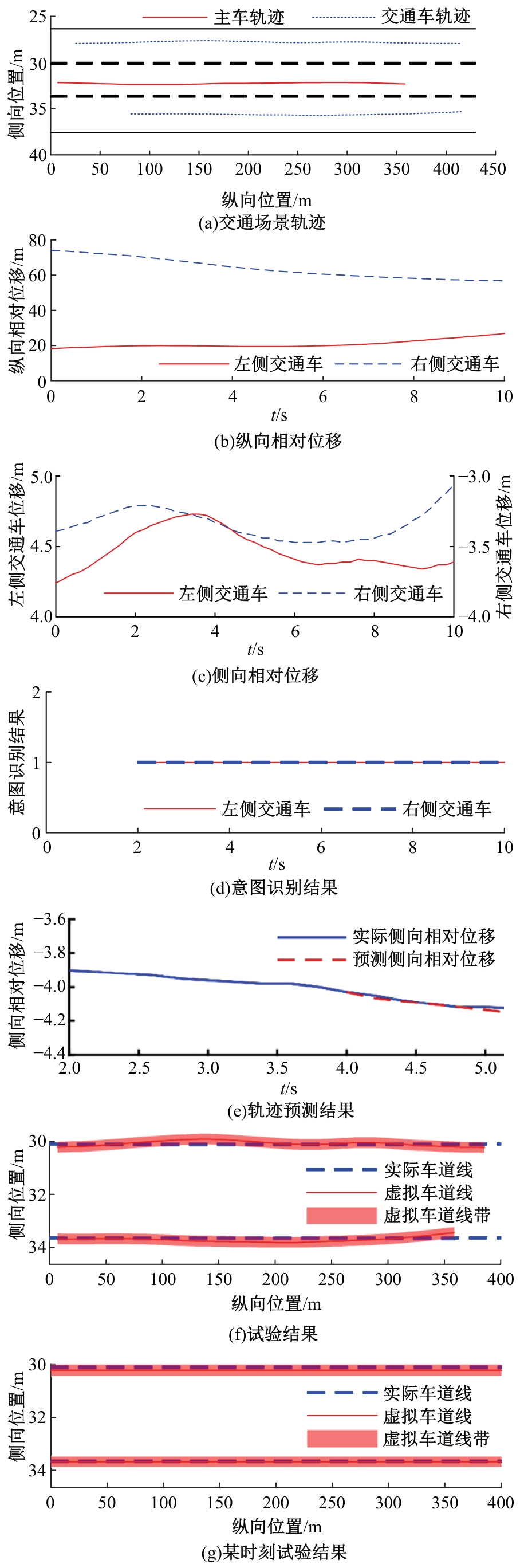
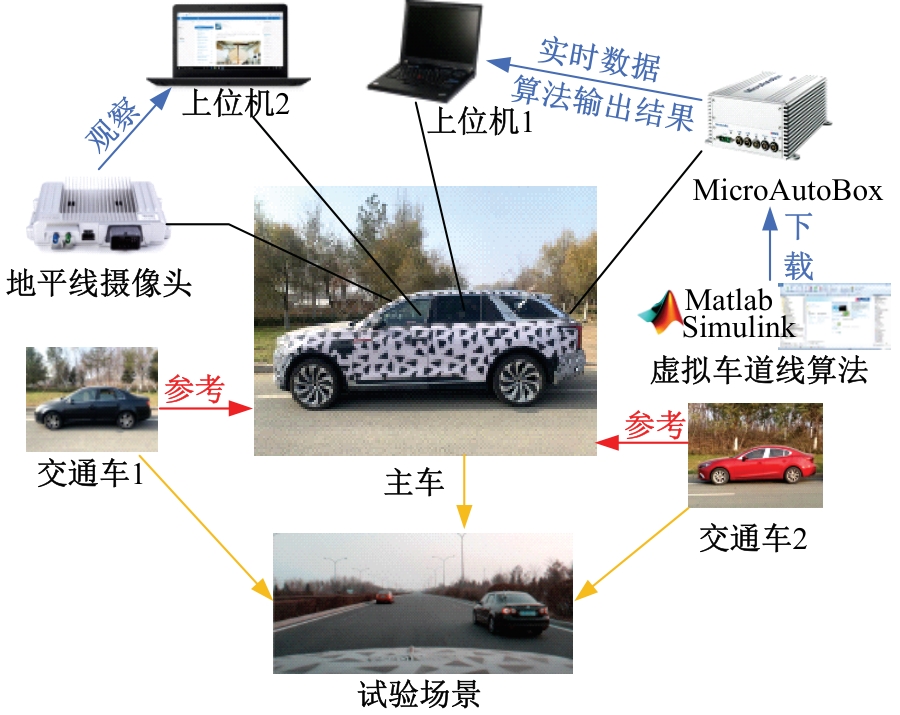
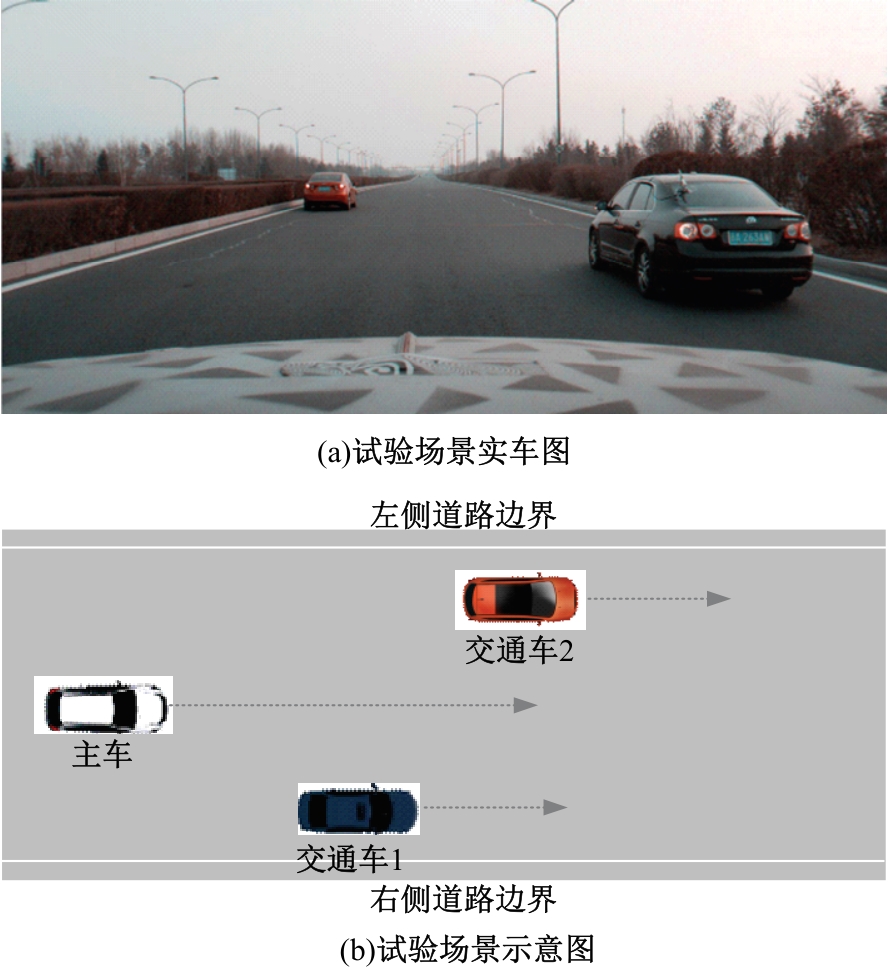
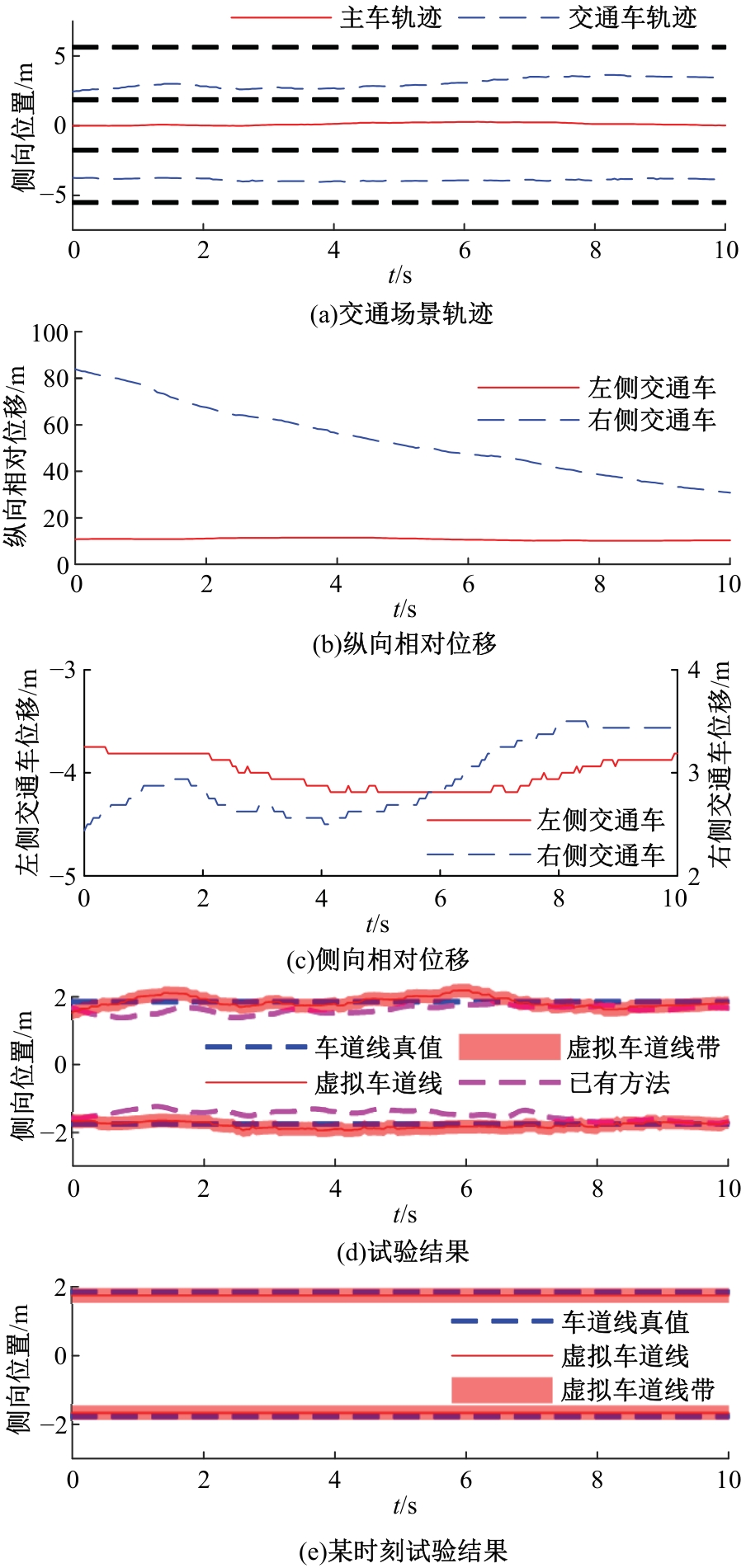
针对车辆行驶道路中部分路段因磨损、冰雪覆盖等引发的车道线缺失问题,提出了一种基于交通环境信息的虚拟车道线拟合方法。首先,基于highD自然驾驶数据集建立了交通车辆在车道保持状态下的车道线横向偏移概率模型,以确定虚拟车道线横向位置;其次,基于双向长短期记忆网络建立了交通车辆意图识别和轨迹预测模型,以实现虚拟车道线产生条件判别和形状生成;最后,根据上述信息,将满足拟合条件的交通车车道线横向偏移统计学特征转化为主车坐标系下的虚拟车道线风险场,以实现虚拟车道线拟合。仿真和实车数据验证结果表明,该方法能够很好地生成安全、有效的虚拟车道线,与车道线真值误差较小,可为主车提供参考行驶空间,确保行车安全。
中图分类号:
- U463.6


| [1] | 蒋一国. 基于GAN的车道线检测算法研究[D]. 长春: 吉林大学计算机科学与技术学院, 2020. |
| Jiang Yi-guo. Research on lane detection based on GAN[D]. Changchun: College of Computer Science and Technology, Jilin University,2020. | |
| [2] | 邓天民, 谢鹏飞, 余洋, 等. 双分支特征自适应融合的车道线检测方法[J/OL]. [2024-05-03]. |
| Deng Tian-min, Xie Peng-fei, Yu Yang, et al. Method of lane detection based on adaptive fusion of double branch features[J/OL]. [2024-05-03]. | |
| [3] | Tabelini L, Berriel R, Paixao T M, et al. Keep your eyes on the lane: Real-time attention-guided lane detection[J/OL]. [2024-05-03] |
| [4] | John V, Karunakaran N M, Guo C Z, et al. Free space, visible and missing lane marker estimation using the PsiNet and extra trees regression[C]∥2018 24th International Confernece on Pattern Recognition, Beijing, China, 2018: 189-194. |
| [5] | John V, Liu Z, Guo C Z, et al. Real-time lane estimation using deep features and extra trees regression[M]. Cham: Springer International Publishing, 2015. |
| [6] | Wang X L, Qian Y Q, Wang C X, et al. Map-enhanced ego-lane detection in the missing feature scenarios[J]. IEEE Access, 2020, 8: 107958-107968. |
| [7] | Yao H C, Chen C, Liu S D, et al. Lane marking detection algorithm based on high-precision map and multisensor fusion[J]. Concurrency and Computation: Practice and Experience, 2022, 34(8): No.e5797. |
| [8] | 齐春阳. 融合交通环境信息的混合动力汽车能量管理策略研究[D]. 长春: 吉林大学汽车工程学院, 2023. |
| Qi Chun-yang. Research on energy management strategy for hybrid electric vehicle with incorporation of traffic information[D]. Changchun: College of Automotive Engineering, Jilin University,2023. | |
| [9] | 王如月. 基于交通信息的汽车制动动力学研究[D].北京:清华大学车辆与运载学院, 2021. |
| Wang Ru-yue. Research on vehicle braking dynamics based on traffic information[D]. Beijing: School of Vehicle and Mobility, Tsinghua University, 2021. | |
| [10] | Zhang Y, Zhang G. Research on the cooperative car-following behavior based on traffic information iteration[J]. International Journal of Modern Physics C, 2023, 34(1): 1-12. |
| [11] | Ding J Y, Wang J Q, Liu C C, et al. Driver steering behavior model based on lane-keeping characteristics analysis[C]∥17th international IEEE conference on intelligent transportation systems (ITSC), Qingdao, China, 2014: 623-628. |
| [12] | Tian Y, Pei H X, Yang J X, et al. An improved model of driving risk field for connected and automated vehicles[C]∥2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, USA, 2021: 285-291. |
| [13] | 何仁, 赵晓聪, 杨奕彬, 等.基于驾驶人风险响应机制的人机共驾模型[J]. 吉林大学学报: 工学版, 2021, 51(3): 799-809. |
| He Ren, Zhao Xiao-cong, Yang Yi-bin, et al. Man⁃machine shared driving model using risk⁃response[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3): 799-809. | |
| [14] | Song X, Sun Y, Tao P. A dynamic Bayesian network model for real-time risk propagation of secondary rear-end collision accident using driving risk field [J]. IEEE Access, 2022, 10: 72429-72443. |
| [15] | Ma Y L, Dong F Q, Yin B Q, et al. Real-time risk assessment model for multi-vehicle interaction of connected and autonomous vehicles in weaving area based on risk potential field[J]. Physica A, 2023, 620: No. 128725. |
| [16] | Li L H, Gan J, Yi Z, et al. Risk perception and the warning strategy based on safety potential field theory[J]. Accident Analysis and Prevention, 2020, 148: No. 105805. |
| [1] | 兰巍,周政,王冠宇,王伟,张苗苗. 基于机器学习的汽车设计智能拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2858-2863. |
| [2] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [3] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [4] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [5] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [6] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [7] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [8] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [9] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [10] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [11] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
| [12] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
| [13] | 卢荡,王晓凡,吴海东. TWEEL轮胎接地压力均布特性分析[J]. 吉林大学学报(工学版), 2025, 55(3): 811-819. |
| [14] | 陈鑫,张祥源,武子涛,于贵申,杨立飞. 工艺顺序对车用铝薄板胶-PFSSW接头拉剪性能的影响[J]. 吉林大学学报(工学版), 2025, 55(2): 468-475. |
| [15] | 朱冰,范天昕,赵文博,李伟男,张培兴. 自动驾驶汽车连续测试场景复杂度评估方法[J]. 吉林大学学报(工学版), 2025, 55(2): 456-467. |
|
||