吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 2847-2857.doi: 10.13229/j.cnki.jdxbgxb.20250242
• 车辆工程·机械工程 • 上一篇
面向纯电动汽车自适应巡航系统的人性化起停控制策略
孙天骏1,2,3( ),杨惠喆2,蔡荣贵2,冯嘉仪3(),冉锐2,刘斌4
),杨惠喆2,蔡荣贵2,冯嘉仪3(),冉锐2,刘斌4
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.吉林大学 汽车工程学院,长春 130022
3.工业和信息化部装备工业发展中心,北京 100846
4.中国第一汽车股份有限公司研发总院,长春 130013
Humanized stop⁃and⁃go control strategy for adaptive cruise system of pure electric vehicle
Tian-jun SUN1,2,3(),Hui-zhe YANG2,Rong-gui CAI2,Jia-yi FENG3(),Rui RAN2,Bin LIU4
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.College of Automotive Engineering,Jilin University,Changchun 130022,China
3.Ministry of Industry and Information Technology Equipment Industry Development Center,Beijing 100846,China
4.FAW General R&D Institute,Changchun 130013,China
摘要:
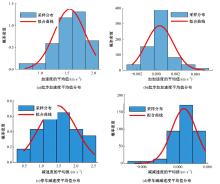
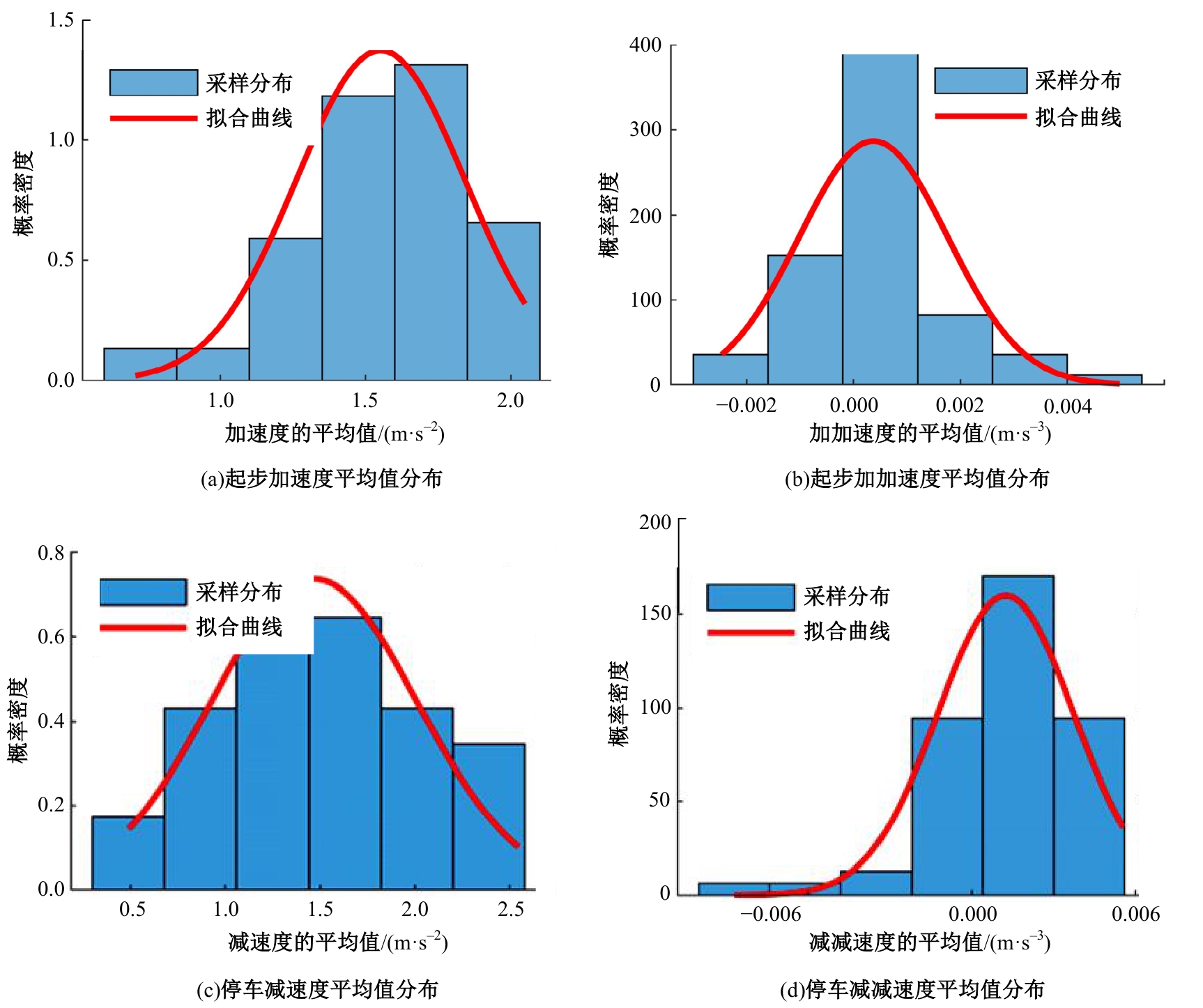
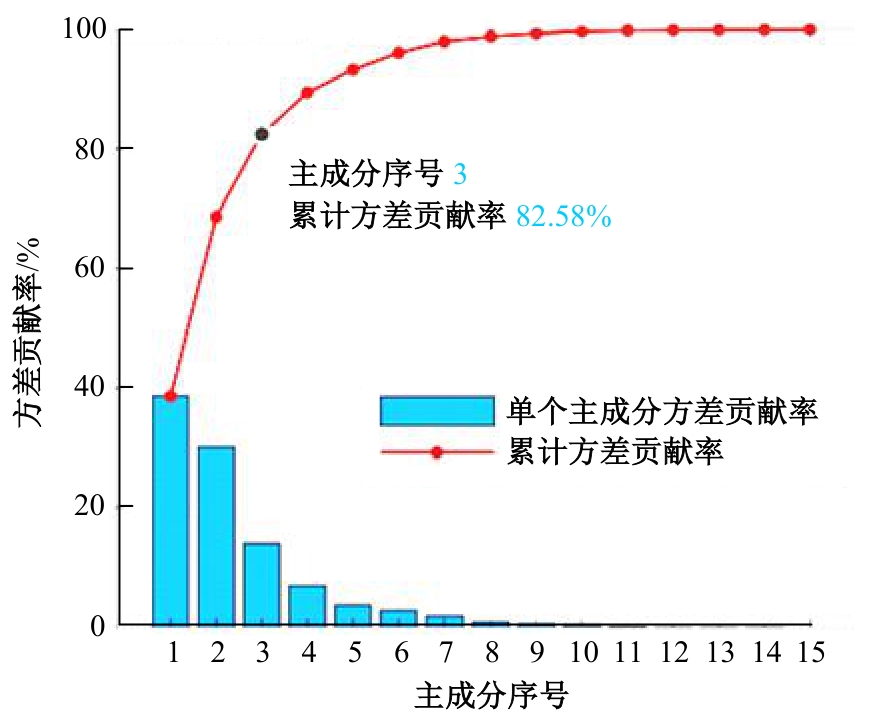
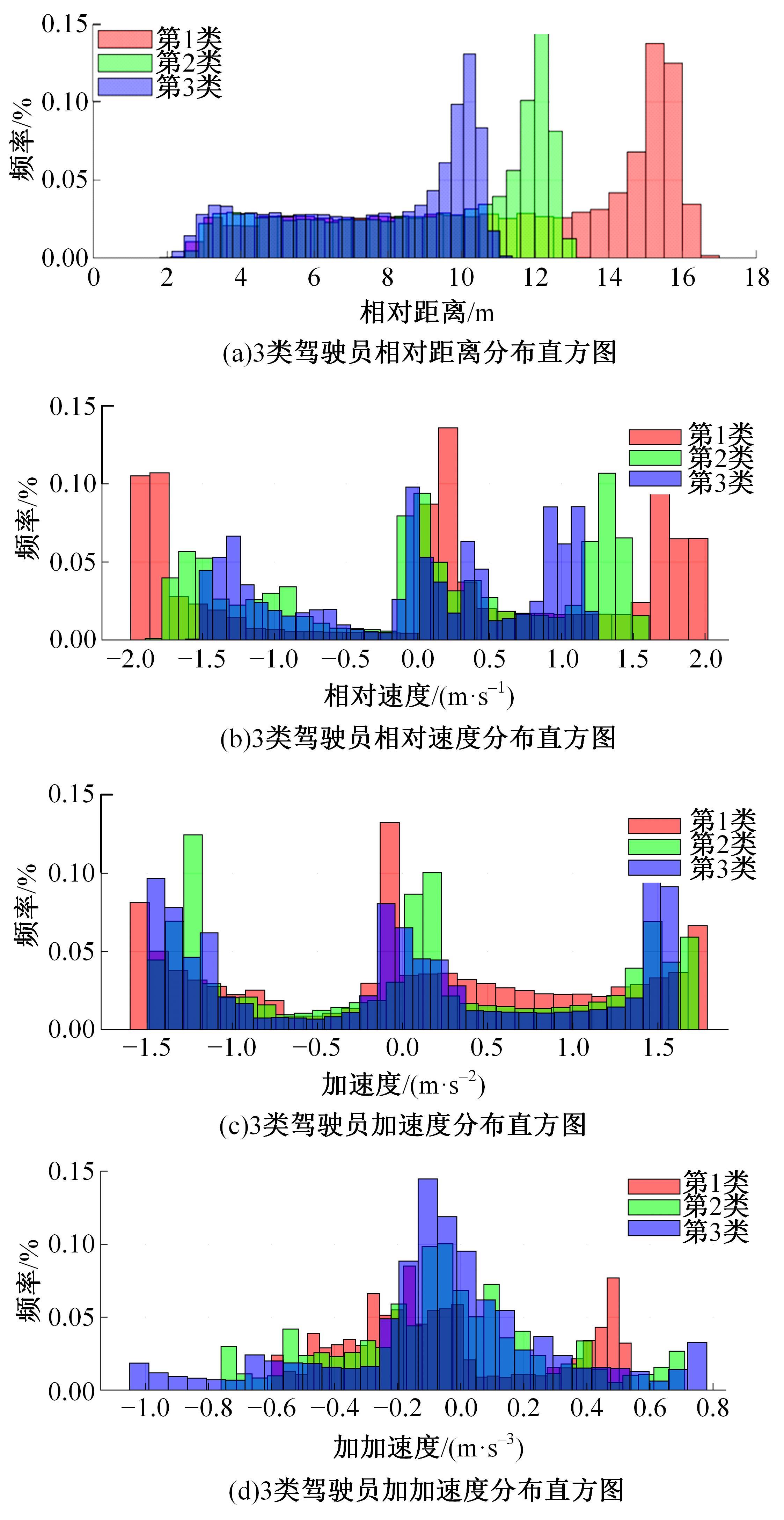
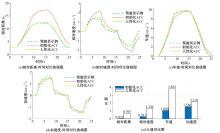
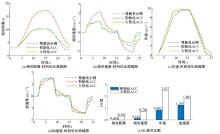
针对纯电动汽车传统自适应巡航系统存在的驾驶风格适配性不足问题,提出了一种基于驾驶行为特征的人性化起停控制策略。首先,对真实驾驶员的起停数据进行分析与特征提取,并利用主成分分析与K-means++算法构建驾驶风格分类模型;其次,设计双层控制架构,实现类人的驱动、制动切换控制逻辑;再次,基于贝叶斯线性回归与最大熵逆优化方法设计人性化因子;最后,通过仿真测试分析,验证了所提方法与真实驾驶员操控行为的一致性。
中图分类号:
- U461.1


| [1] | 高镇海, 孙天骏. 汽车智能辅助驾驶系统技术[M]. 北京:机械工业出版社, 2024. |
| [2] | 孙天骏. 基于学习控制的汽车全速自适应巡航决策与控制算法研究[D]. 长春: 吉林大学汽车工程学院, 2019. |
| Sun Tian-jun. Research on decision and control algorithm for vehicle full-speed adaptive cruise based on learning[D]. Changchun: College of Automotive Engineering, Jilin University, 2019. | |
| [3] | 徐顺鑫, 谢辉, 刘昌文. 基于参数自学习的智能电动公交车起停加速度跟踪控制[J]. 武汉大学学报: 工学版, 2024, 57(7): 950-963. |
| Xu Shun-xin, Xie Hui, Liu Chang-wen. Start-stop acceleration tracking control of intelligent electric bus based on parameter self-learning[J]. Engineering Journal of Wuhan University (Engineering Edition), 2024, 57(7): 950-963. | |
| [4] | Zhang Y, Lin Y, Qin Y, et al. A new adaptive cruise control considering crash avoidance for intelligent vehicle[J]. IEEE Transactions on Industrial Electronics, 2024, 71(1): 688-696. |
| [5] | 中汽协会行业信息部. 中国汽车工业协会信息发布会[EB/OL].[2025-03-14]. |
| [6] | Yu L, Wang R. Researches on adaptive cruise control system: a state of the art review[J]. Proceedings of the Institution of Mechanical Engineers Part D-Journal of Automobile Engineering, 2022, 236(2/3): 211-240. |
| [7] | Yu S, Pan X, Georgiou A, et al. A robust model predictive control framework for ecological adaptive cruise control strategy of electric vehicles[EB/OL]. [2025-03-14]. |
| [8] | Fleming J, Midgley W J B. Energy-efficient automated driving: Effect of a naturalistic eco-ACC on a following vehicle[C]∥2023 IEEE International Conference on Mechatronics. Piscataway, NJ: IEEE, 2023: 1-6. |
| [9] | 张哲, 丁海涛, 张袅娜, 等. 智能网联电动汽车经济性巡航速度规划[J]. 汽车工程, 2022, 44(4): 609-616, 637. |
| Zhang Zhe, Ding Hai-tao, Zhang Niao-na, et al. Economie cruising speed planning of intelligent network connected eleetrie vehicle[J]. Automotive Engineering, 2022, 44(4): 609-616, 637. | |
| [10] | 张亮修, 吴光强, 郭晓晓. 车辆自适应巡航控制系统的建模与分层控制[J]. 汽车工程, 2018, 40(5): 547-553. |
| Zhang Liang-xiu, Wu Guang-qiang, Guo Xiao-xiao. Modeling and hierarchical control of vehicle ACC system[J]. Automotive Engineering, 2018, 40(5): 547-553. | |
| [11] | 初亮, 李天骄, 孙成伟. 纯电动车自适应巡航纵向控制方法研究[J]. 汽车工程, 2018, 40(3): 277-282, 296. |
| Chu Liang, Li Tian-jiao, Sun Cheng-wei. A research on adaptive cruise longitudinal control scheme for battery electric vehicles[J]. Automotive Engineering, 2018, 40(3): 277-282, 296. | |
| [12] | Jia Y, Jibrin R, Görges D. Energy-optimal adaptive cruise control for electric vehicles based on linear and nonlinear model predictive control[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14173-14187. |
| [13] | Yang M, Tian J. Longitudinal and lateral stability control strategies for ACC systems of differential steering electric vehicles[J]. Electronics, 2023, 12(19): No.4178. |
| [14] | Guo J, Li W, Wang J, et al. Safe and energy-efficient car-following control strategy for intelligent electric vehicles considering regenerative braking[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7070-7081. |
| [15] | Yarlagadda J, Pawar D S. Heterogeneity in the driver behavior: An exploratory study using real-time driving data[J]. Journal of Advanced Transportation, 2022, 2022: No.4509071. |
| [16] | Gilman E, Keskinarkaus A, Tamminen S, et al. Personalized assistance for fuel-efficient driving[J]. Transportation Research Part C: Emerging Technologies, 2015, 58: 681-705. |
| [17] | Li Z H, Li Z L, Zhao X H, et al. Development of human-like automated driving following rules: a comparison between China and Germany[J]. Transportation Planning and Technology, 2024, 48(2): 366-386. |
| [18] | Gao Z, Wang J, Hu H, et al. Control mode switching strategy for ACC based on intuitionistic fuzzy set multi-attribute decision making method[J]. Journal of Intelligent & Fuzzy Systems, 2016, 31(6): 2967-2974. |
| [19] | 黄晶, 韦伟, 邹德飚. 基于个性化间距策略的自适应巡航系统模式切换策略研究[J]. 汽车工程, 2020, 42(10): 1302-1311. |
| Huang Jing, Wei Wei, Zou De-biao. Research on multi-mode switching strategy of adaptive cruise Control system based on personalized spacing strategy[J]. Automotive Engineering, 2020, 42(10): 1302-1311. | |
| [20] | 朱乃宣. 仿驾驶员行为的智能汽车横向决策方法研究[D].吉林: 吉林大学汽车工程学院, 2024. |
| Zhu Nai-xuan. Research on lateral decision-making method for intelligent vehicles imitating driver behavior[D]. Jilin: College of Automotive Engineering, Jilin University, 2024. |
| [1] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [2] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [3] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [4] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [5] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [6] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [7] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [8] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [9] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
| [10] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
| [11] | 卢荡,王晓凡,吴海东. TWEEL轮胎接地压力均布特性分析[J]. 吉林大学学报(工学版), 2025, 55(3): 811-819. |
| [12] | 陈鑫,张祥源,武子涛,于贵申,杨立飞. 工艺顺序对车用铝薄板胶-PFSSW接头拉剪性能的影响[J]. 吉林大学学报(工学版), 2025, 55(2): 468-475. |
| [13] | 朱冰,范天昕,赵文博,李伟男,张培兴. 自动驾驶汽车连续测试场景复杂度评估方法[J]. 吉林大学学报(工学版), 2025, 55(2): 456-467. |
| [14] | 曲俊龙,史文库,玄圣夷,陈志勇. 面向汽车传动系统多挡共振的多级吸振器参数设计方法[J]. 吉林大学学报(工学版), 2025, 55(2): 444-455. |
| [15] | 王军年,曹宇靖,罗智仁,李凯旋,赵文伯,孟盈邑. 基于双目视觉的道路水深在线检测算法[J]. 吉林大学学报(工学版), 2025, 55(1): 175-184. |
|
||