Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (12): 3729-3739.doi: 10.13229/j.cnki.jdxbgxb.20230175
Previous Articles Next Articles
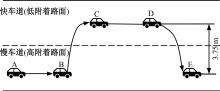
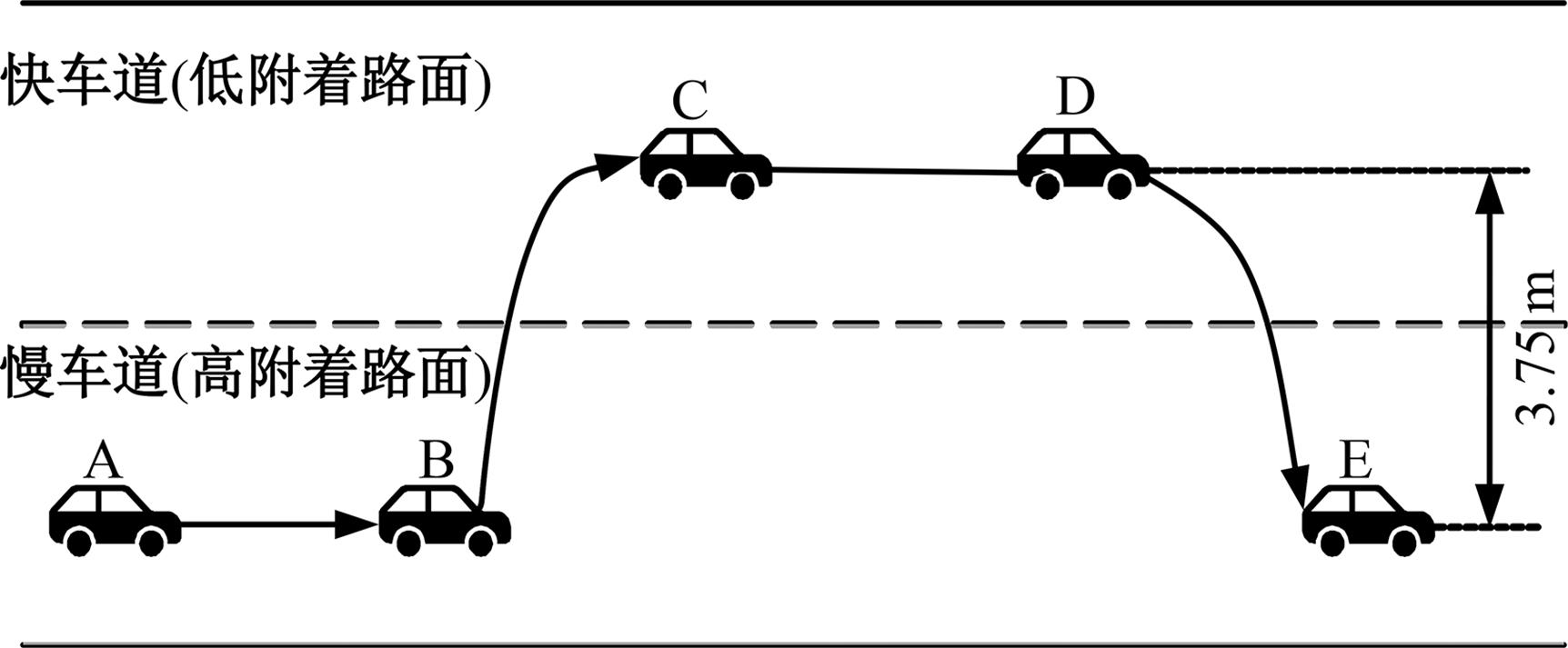
Dynamic control for trajectory tracking of variable speed lane change in autonomous vehicles
Gang LIU1( ),Qun FAN1,Xu YANG2,Hong-bin REN3
),Qun FAN1,Xu YANG2,Hong-bin REN3
- 1.School of Mechatronics Engineering,Shenyang Aerospace University,Shenyang 110136,China
2.Liaoning Luping Machinery Co. ,Ltd. ,Tieling 112001,China
3.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China
CLC Number:
- U463.6

| 1 | Claussmann L, Revilloud M, Gruyer D, et al. A revi-ew of motion planning for highway autonomous driv-ing[J]. IEEE Transactions on Intelligent TransportationSystems,2019,21(5):1826-1848. |
| 2 | 陈磊,王杨,董志圣,等.一种基于转向意图的车辆敏捷性控制策略[J].吉林大学学报:工学版,2023,53(5):1257-1263. |
| Chen Lei, Wang Yang, Dong Zhi-sheng, et al. A vehicle agility control strategy based on steering intention[J]. Journal of Jilin University (Engineering and Technology Edition),2023,53(5):1257-1263. | |
| 3 | 徐明泽,刘清河.基于LQR和PID的智能车轨迹跟踪控制算法设计与仿真[J].太原理工大学学报,2022,53(5):877-885. |
| Xu Ming-ze, Liu Qing-he. Design and simulation of intelligent vehicle trajectory tracking control algorithm based on LQR and PID[J]. Journal of Taiyuan University of Technology,2022,53(5):877-885. | |
| 4 | Pan R Y, Jie L H, Zhao X Y, et al. Active obstacle avoidance trajectory planning for vehicles based on obstacle potential field and MPC in V2P scenario[J]. Sensors,2023,23(6):No.23063248. |
| 5 | Cui Q J, Ding R J, Wei C F, et al. Path-tracking and lateral stabilisation for autonomous vehicles by using the steering angle envelope[J]. Vehicle System Dynamics,2020,59(11/12):1672-1696. |
| 6 | He D F, Peng B B. Gaussian learning-based fuzzy predictive cruise control for improving safety and economy of connected vehicles[J]. IET Intelligent Transport Systems,2020,14(5):346-355. |
| 7 | 陈特,陈龙,徐兴,等.分布式驱动无人车路径跟踪与稳定性协调控制[J].汽车工程,2019,41(10):1109-1116. |
| Chen Te, Chen Long, Xu Xing, et al. Distributed drive unmanned vehicle path tracking and stability of coordinate control[J]. Journal of Automobile Engineering, 2019,41(10):1109-1116. | |
| 8 | 李韶华,杨泽坤,王雪玮.基于T-S模糊变权重MPC的智能车轨迹跟踪控制[J].机械工程学报,2023,59(4):199-212. |
| Li Shao-hua, Yang Ze-kun, Wang Xue-wei. Intelligent vehicle trajectory tracking control based on T-S fuzzy variable weight MPC[J]. Journal of Mechanical Engineering,2023,59(4):199-212. | |
| 9 | Li B, Ouyang Y K, Li L, et al. Autonomous dr-iving on curvy roads without reliance on frenet frame:a cartesian-based trajectory planning method[J]. IEEE Transactions on Intelligent Transportation Systems,2022,23(9):15729-15741. |
| 10 | 孟繁瑞, 王翔, 俄文娟, 等. 基于GCN-CS-LSTM的车辆多模态行驶轨迹预测[J]. 江苏大学学报: 自然科学版, 2024, 45(5): 506-512. |
| Meng Fan-rui, Wang Xiang, Wen-juan E,et al. Multi-modal trajectory prediction of vehicles based on GCN-CS-LSTM[J]. Journal of Jiangsu University (Natural Science Edition), 2024, 45(5): 506-512 | |
| 11 | 王其东,刘伟,陈无畏,等.基于路面识别的汽车稳定系统滑模控制[J].汽车工程, 2018,40(1):82-90, 106. |
| Wang Qi-dong, Liu Wei, Chen Wu-wei, et al. Slidingmode control of vehicle stability system based on ro-ad recognition[J]. Automotive Engineering,2018,40(1):82-90, 106. | |
| 12 | 牛国臣,李文帅.基于双五次多项式的智能汽车换道轨迹规划[J].汽车工程,2021,43(7):978-986, 1004. |
| Niu Guo-chen, Li Wen-shuai. Smart car based on double five times polynomial lane changing trajectory planning[J]. Journal of Automobile Engineering,2021,43(7):978-986, 1004. | |
| 13 | 张志勇,龙凯,杜荣华,等.自动驾驶汽车高速超车轨迹跟踪协调控制[J].汽车工程,2021,43(7):995-1004. |
| Zhang Zhi-yong, Long Kai, Du Rong-hua, et al. High-speed automatic driving a car overtaking trajectory tracking coordination control[J]. Journal of Automobile Engineering, 2021,43(7):995-1004. | |
| 14 | Zhang X Y, Wang P, Lin J M, et al. Real-time nonlinear predictive controller design for drive-by-wire vehicle lateral stability with dynamic boundary conditions[J]. Fundamental Research,2022,2(1):131-143. |
| [1] | Shou-tao LI,Lu YANG,Ru-yi QU,Peng-peng SUN,Ding-li YU. Slip rate control method based on model predictive control [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2687-2696. |
| [2] | Liang WU,Yi-fan GU,Biao XING,Fang-wu MA,Li-wei NI,Wei-wei JIA. Steering four-wheel distributed integrated control method based on LQR [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2414-2422. |
| [3] | Yu-hai WANG,Xiao-zhi LI,Xing-kun LI. Predictive energy saving algorithm for hybrid electric truck under high-speed condition [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2121-2129. |
| [4] | Sheng CHANG,Hong-fei LIU,Nai-wei ZOU. H∞ loop shaping robust control of vehicle tracking on variable curvature curve [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2141-2148. |
| [5] | Jian-ze LIU,Jiang LIU,Min LI,Xin-jie ZHANG. Vehicle speed decoupling road identification method based on least squares [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 1821-1830. |
| [6] | Xian-yi XIE,Ming-jun ZHANG,Li-sheng JIN,Bin ZHOU,Tao HU,Yu-fei BAI. Artificial bee colony trajectory planning algorithm for intelligent vehicles considering comfortable [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(6): 1570-1581. |
| [7] | Ling HUANG,Zuan CUI,Feng YOU,Pei-xin HONG,Hao-chuan ZHONG,Yi-xuan ZENG. Vehicle trajectory prediction model for multi-vehicle interaction scenario [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1188-1195. |
| [8] | Hong-yan GUO,Lian-bing WANG,Xu ZHAO,Qi-kun DAI. Joint estimation of vehicle mass and road slope considering lateral motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1175-1187. |
| [9] | Yu-kai LU,Shuai-ke YUAN,Shu-sheng XIONG,Shao-peng ZHU,Ning ZHANG. High precision detection system for automotive paint defects [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1205-1213. |
| [10] | Shao-hua WANG,Qi-rui ZHANG,De-hua SHI,Chun-fang YIN,Chun LI. Analysis of nonlinear vibration response characteristics of hybrid transmission system with dual-planetary gear sets [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 890-901. |
| [11] | Xue-jing DU,Ning WANG,Jie ZHANG,Yu-long PEI. Control strategy of lateral stability of semi-trailer train in dangerous section of cold area [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 996-1006. |
| [12] | Jing-hua ZHAO,Yu-tong ZHANG,Pai CAO,Zhong-shu WANG,Xiao-ping LI,Ya-nan SUN,Fang-xi XIE. Optimal energy management on extended⁃range electric vehicle equipped with compressed natural gas engine [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 600-609. |
| [13] | Zhen-hai GAO,Rong-gui CAI,Tian-jun SUN,Tong YU,Hao-yuan ZHAO,Hao BAN. Data⁃filtering method for driving behavior based on vehicle shared autonomy [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 589-599. |
| [14] | Xian-yi XIE,Yu-han WANG,Li-sheng JIN,Xin ZHAO,Bai-cang GUO,Ya-ping LIAO,Bin ZHOU,Ke-qiang LI. Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 620-630. |
| [15] | Wen-hang LI,Tao NI,Ding-xuan ZHAO,Ying-jie DENG,Xiao-bo SHI. Control method on hydraulic suspension systems of rescue vehicles based on model predictive feedback technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 610-619. |
|