Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (1): 84-92.doi: 10.13229/j.cnki.jdxbgxb.20230266
Previous Articles Next Articles
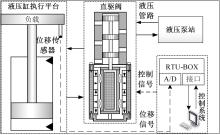
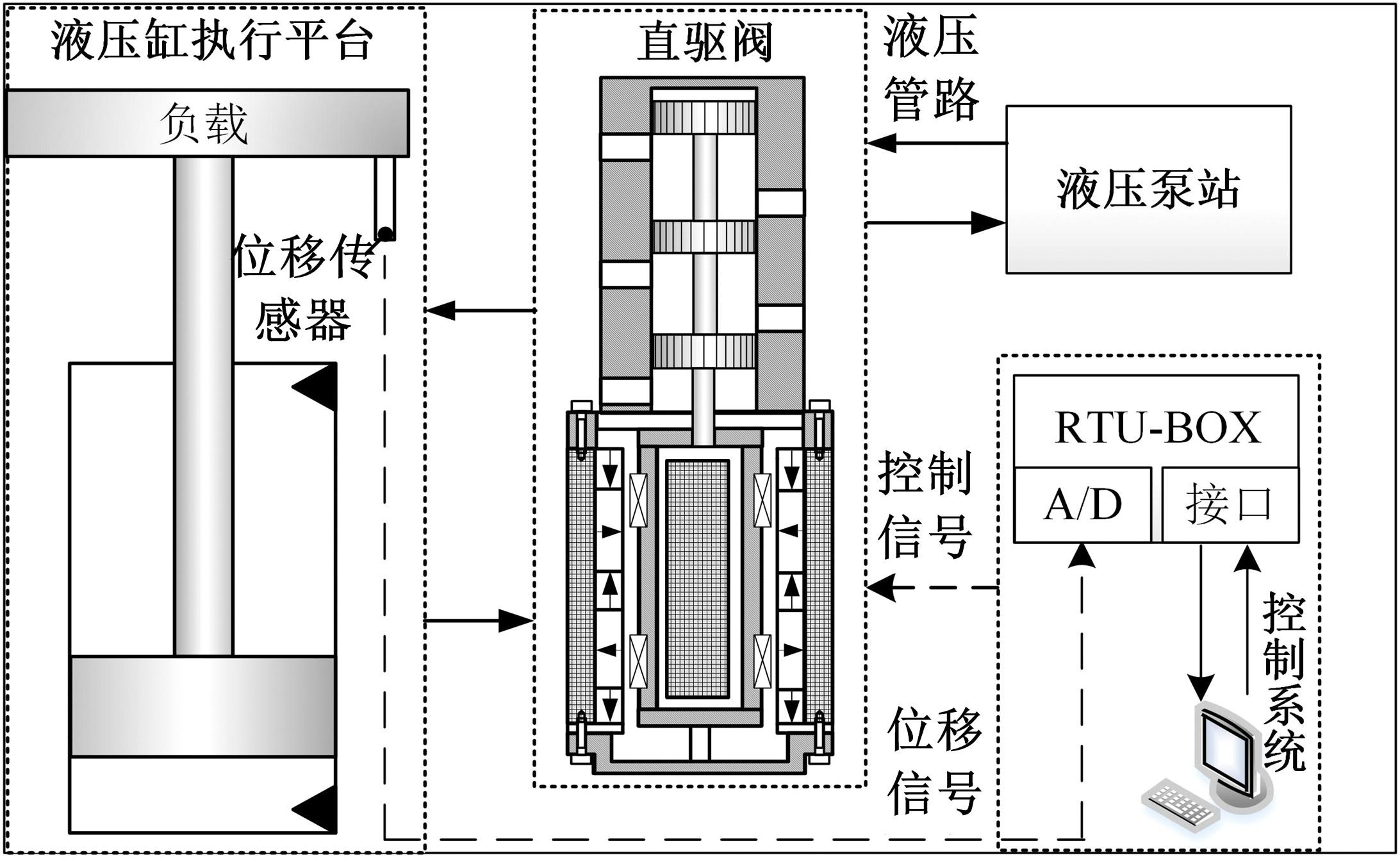
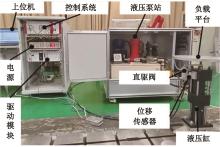
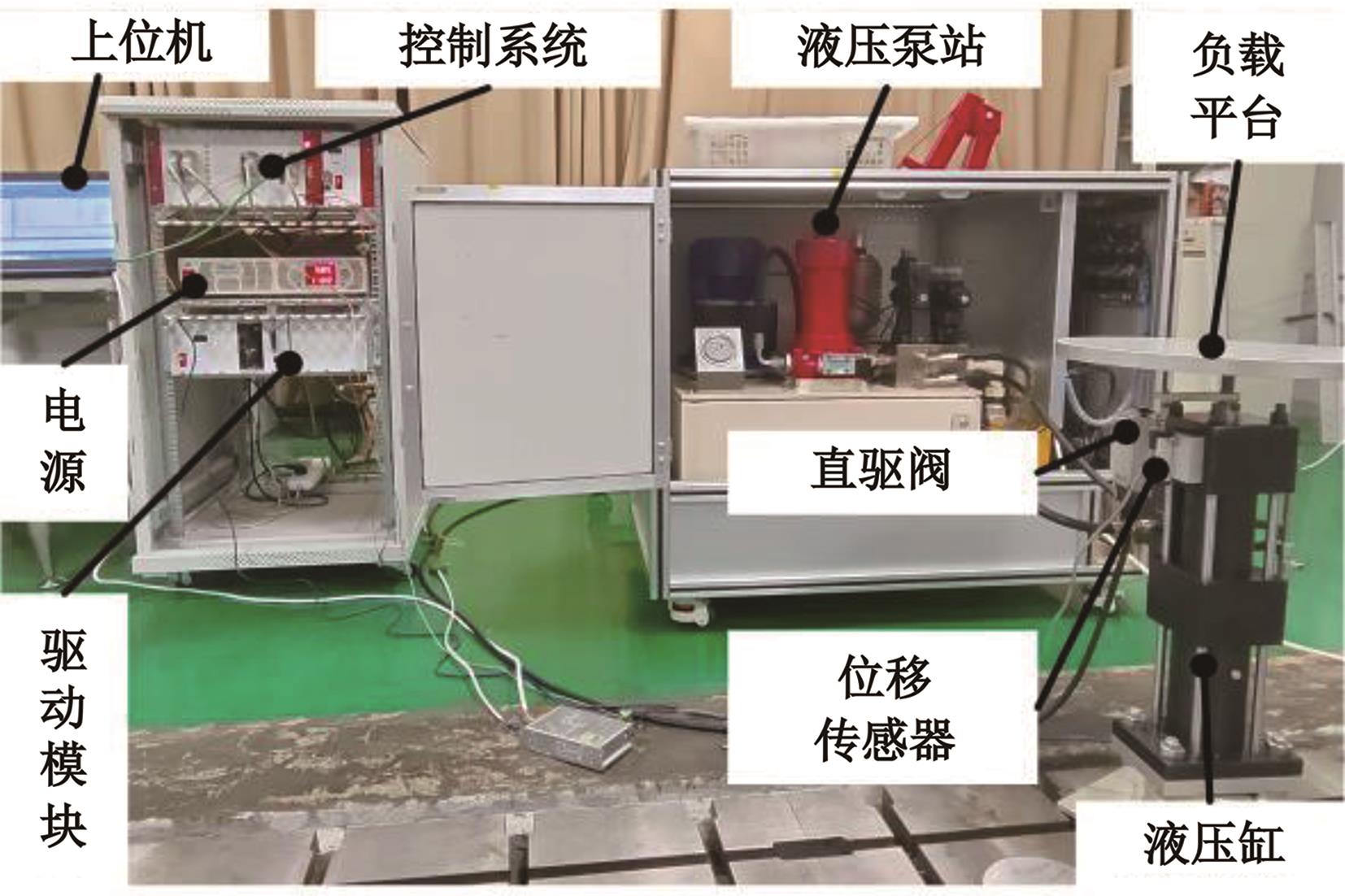
Improved active disturbance rejection control for hydraulic vibration stages based on the direct-drive valve
Cao TAN( ),Hao-xin REN,Wen-qing GE(),Ya-dong SONG,Jia-yu LU
),Hao-xin REN,Wen-qing GE(),Ya-dong SONG,Jia-yu LU
- School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo 255000,China
CLC Number:
- U467.5
| 1 | 汪飞雪, 姚静, 胡福泰, 等.锻造液压机振动特性机-液联合仿真[J]. 中国机械工程, 2020, 31(10): 1175-1182, 1189. |
| Wang Fei-xue, Yao Jing, Hu Fu-tai, et al. Machine hydraulic joint simulation of vibration characteristics of forging hydraulic presses[J]. China Mechanical Engineering, 2020, 31 (10): 1175-1182, 1189. | |
| 2 | 李波, 黎德祥, 葛文庆, 等. 基于直驱阀的快速响应线控制动系统液压力精确控制[J]. 中国公路学报, 2021, 34(9): 121-132. |
| Li Bo, Li De-xiang, Ge Wen-qing, et al. Accurate control of hydraulic pressure in a direct drive valve based fast response line control actuator system[J]. Journal of China Highway, 2021, 34 (9): 121-132. | |
| 3 | Feng H, Ma W, Yin C, et al. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller[J]. Automation in Construction, 2021, 127(Sup.C): No.103722. |
| 4 | Wrat G, Bhola M, Ranjan P, et al. Energy saving and Fuzzy-PID position control of electro-hydraulic system by leakage compensation through proportional flow control valve[J]. ISA Transactions, 2020, 101: 269-280. |
| 5 | 赵岩, 周秦源, 邵念锋, 等. 基于RBF神经网络模糊PID控制的电液伺服系统 [J]. 机电工程, 2022, 39(2): 244-249. |
| Zhao Yan, Zhou Qin-yuan, Shao Nian-feng, et al. Electrohydraulic servo system based on RBF neural network fuzzy PID control[J]. Mechanical and Electrical Engineering, 2022,39 (2): 244-249. | |
| 6 | Xu Z, Liu Q, Yao J. Adaptive prescribed performance control for hydraulic system with disturbance compensation[J]. International Journal of Adaptive Control and Signal Processing, 2021, 35(8): 1544-1561. |
| 7 | 聂守成, 钱林方, 陈志群, 等. 基于干扰观测器的弹丸协调器电液伺服系统自适应滑模控制 [J]. 兵工学报, 2020, 41(9): 1745-1751. |
| Nie Shou-cheng, Qian Lin-fang, Chen Zhi-qun, et al. Adaptive sliding mode control for electrohydraulic servo system of projectile coordinator based on disturbance observer[J]. Journal of Military Engineering, 2020, 41(9): 1745-1751. | |
| 8 | 李玉昆, 李永泉, 万一心, 等.液压伺服驱动3-UPS/S并联稳定平台振动响应分析 [J]. 中国机械工程, 2019, 30(4): 423-430. |
| Li Yu-kun, Li Yong-quan, Wan Yi-xin, et al. Vibration response analysis of a hydraulic servo driven 3-UPS/S parallel stabilized platform[J]. China Mechanical Engineering, 2019, 30(4): 423-430. | |
| 9 | Mintsa H A, Venugopal R, Kenne J P, et al. Feedback linearization-based position control of an electrohydraulic servo system with supply pressure uncertainty[J]. IEEE Transactions on Control Systems Technology, 2012, 20(4): 1092-1099. |
| 10 | Du H, Ding K, Shi J, et al. High-gain observer-based pump/valve combined control for heavy vehicle electro-hydraulic servo steering system[J]. Mechatronics, 2022, 85: No.102815. |
| 11 | 张震阳, 汪成文, 郭新平, 等. 基于ESO的电液位置伺服系统反步滑模控制 [J]. 北京航空航天大学学报, 2022, 48(6): 1082-1090. |
| Zhang Zhen-yang, Wang Cheng-wen, Guo Xin-ping, et al. ESO based backstepping sliding mode control for electro-hydraulic position servo systems [J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48 (6): 1082-1090. | |
| 12 | 李骥鹏, 孙春耕, 段志杰, 等. 电液力伺服系统的反馈线性化滑模控制研究 [J]. 机电工程, 2023, 40(6): 860-866. |
| Li Ji-peng, Sun Chun-geng, Duan Zhi-jie, et al. Research on feedback linearization sliding mode control for electrohydraulic servo systems[J]. Mechanical and Electrical Engineering, 2023, 40(6): 860-866. | |
| 13 | Gao B, Shao J, Yang X. A compound control strategy combining velocity compensation with ADRC of electro-hydraulic position servo control system[J]. ISA Tranactions, 2014, 53(6): 1910-1918. |
| 14 | 杨文明, 白建朋, 黄莹, 等. 基于BP改进PID的掘进机闭环回路跟随误差联合仿真[J]. 中国工程机械学报, 2022, 20(6): 493-497. |
| Yang Wen-ming, Bai Jian-peng, Huang Ying, et al. Joint simulation of tracking error in closed loop of roadheader based on BP improved PID[J]. Journal of China Construction Machinery, 2022, 20(6): 493-497. | |
| 15 | 王立新, 赵丁选, 刘福才, 等. 基于死区补偿的电液位置伺服系统自抗扰控制[J]. 中国机械工程, 2021, 32(12): 1432-1442. |
| Wang Li-xin, Zhao Ding-xuan, Liu Fu-cai, et al. Auto-disturbance rejection control for electro-hydraulic position servo systems based on dead zone compensation[J]. China Mechanical Engineering, 2021, 32 (12): 1432-1442. | |
| 16 | 王立新, 赵丁选, 刘福才, 等. 一类轻载电液位置伺服系统线性自抗扰控制[J]. 控制理论与应用, 2021, 38(4): 503-515. |
| Wang Li-xin, Zhao Ding-xuan, Liu Fu-cai, et al. Linear active disturbance rejection control for a class of lightly loaded electrohydraulic position servo systems[J]. Control Theory and Application, 2021, 38(4): 503-515. | |
| 17 | 司国雷, 神英淇, 王嘉磊, 等. 电液位置伺服系统自抗扰控制研究 [J]. 液压与气动, 2020(12): 14-21. |
| Si Guo-lei, Shen Ying-qi, Wang Jia-lei, et al. Research on active disturbance rejection control for electrohydraulic position servo system[J]. Hydraulic and Pneumatic, 2020(12): 14-21. | |
| 18 | 付永领, 陈辉, 刘和松, 等. 基于自抗扰控制的导弹电液舵机系统研究 [J]. 宇航学报, 2010, 31(4): 1051-1055. |
| Fu Yong-ling, Chen Hui, Liu He-song, et al. Research on missile electrohydraulic actuator system based on active disturbance rejection control [J]. Journal of Astronautics, 2010, 31(4): 1051-1055. | |
| 19 | 范新宇, 王鹏, 殷杰, 等. 新型复合式电磁直线执行器的多模式协调控制[J]. 中国机械工程, 2023, 34(3): 292-299. |
| Fan Xin-yu, Wang Peng, Yin Jie, et al. Multimode coordinated control of a new composite electromagnetic linear actuator[J]. China Mechanical Engineering, 2023,34 (3): 292-299. | |
| 20 | 谭草, 黎德祥, 葛文庆, 等. 改进LuGre模型的电磁直线执行器自适应鲁棒控制[J]. 电机与控制学报, 2022, 26(10): 130-138. |
| Tan Cao, Li De-xiang, Ge Wen-qing, et al. Adaptive robust control for electromagnetic linear actuator with improved LuGre model[J]. Electric Machines and Control, 2022, 26 (10): 130-138. | |
| 21 | Lu Y, Tan C, Ge W, et al. Adaptive disturbance observer-based improved super-twisting sliding mode control for electromagnetic direct-drive pump[J]. Smart Materials and Stuctures,2022, 32(1): No. 017001. |
| 22 | 谭草, 鲁应涛, 葛文庆, 等. 直驱式永磁直线电机深度模糊滑模-自抗扰控制[J]. 西安交通大学学报, 2023, 57(1): 185-194. |
| Tan Cao, Lu Ying-tao, Ge Wen-qing, et al. Deep fuzzy sliding mode active disturbance rejection control for direct drive permanent magnet linear motors[J]. Journal of Xi'an Jiaotong University, 2023,57(1): 185-194. | |
| 23 | Chen G, Jiang Y, Tang Y, et al. Revised adaptive active disturbance rejection sliding mode control strategy for vertical stability of active hydro-pneumatic suspension[J]. ISA Transactions, 2023, 132: 490-507. |
| 24 | 曾喆昭, 陈泽宇.论PID与自耦PID控制理论方法 [J]. 控制理论与应用, 2020, 37(12): 2654-2662. |
| Zeng Zhe-zhao, Chen Ze-yu. On PID and self coupling PID control theory and method[J]. Control Theory and Application, 2020, 37(12): 2654-2662. | |
| 25 | 杨旭, 曹立佳, 刘洋. 基于自耦PID控制的四旋翼无人机姿态控制 [J]. 兵器装备工程学报, 2021, 42(10): 170-175. |
| Yang Xu, Cao Li-jia, Liu Yang. Attitude control of a four rotor unmanned aerial vehicle based on self coupled PID control[J]. Journal of Weapon Equipment Engineering, 2021, 42 (10): 170-175. | |
| 26 | 郭新平, 汪成文, 刘华, 等. 基于扩张状态观测器的泵控电液伺服系统滑模控制 [J]. 北京航空航天大学学报, 2020, 46(6): 1159-1168. |
| Guo Xin-ping, Wang Cheng-wen, Liu Hua, et al. Sliding mode control for pump controlled electrohydraulic servo systems based on extended state observer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1159-1168. |
| [1] | Jun-nian WANG,Yu-jing CAO,Zhi-ren LUO,Kai-xuan LI,Wen-bo ZHAO,Ying-yi MENG. Online detection algorithm of road water depth based on binocular vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(1): 175-184. |
| [2] | Shou-tao LI,Lu YANG,Ru-yi QU,Peng-peng SUN,Ding-li YU. Slip rate control method based on model predictive control [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2687-2696. |
| [3] | Liang WU,Yi-fan GU,Biao XING,Fang-wu MA,Li-wei NI,Wei-wei JIA. Steering four-wheel distributed integrated control method based on LQR [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2414-2422. |
| [4] | Yu-hai WANG,Xiao-zhi LI,Xing-kun LI. Predictive energy saving algorithm for hybrid electric truck under high-speed condition [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2121-2129. |
| [5] | Sheng CHANG,Hong-fei LIU,Nai-wei ZOU. H∞ loop shaping robust control of vehicle tracking on variable curvature curve [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2141-2148. |
| [6] | Jian-ze LIU,Jiang LIU,Min LI,Xin-jie ZHANG. Vehicle speed decoupling road identification method based on least squares [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 1821-1830. |
| [7] | Xian-yi XIE,Ming-jun ZHANG,Li-sheng JIN,Bin ZHOU,Tao HU,Yu-fei BAI. Artificial bee colony trajectory planning algorithm for intelligent vehicles considering comfortable [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(6): 1570-1581. |
| [8] | Ling HUANG,Zuan CUI,Feng YOU,Pei-xin HONG,Hao-chuan ZHONG,Yi-xuan ZENG. Vehicle trajectory prediction model for multi-vehicle interaction scenario [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1188-1195. |
| [9] | Hong-yan GUO,Lian-bing WANG,Xu ZHAO,Qi-kun DAI. Joint estimation of vehicle mass and road slope considering lateral motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1175-1187. |
| [10] | Yu-kai LU,Shuai-ke YUAN,Shu-sheng XIONG,Shao-peng ZHU,Ning ZHANG. High precision detection system for automotive paint defects [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1205-1213. |
| [11] | Shao-hua WANG,Qi-rui ZHANG,De-hua SHI,Chun-fang YIN,Chun LI. Analysis of nonlinear vibration response characteristics of hybrid transmission system with dual-planetary gear sets [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 890-901. |
| [12] | Xue-jing DU,Ning WANG,Jie ZHANG,Yu-long PEI. Control strategy of lateral stability of semi-trailer train in dangerous section of cold area [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 996-1006. |
| [13] | Zhen-hai GAO,Rong-gui CAI,Tian-jun SUN,Tong YU,Hao-yuan ZHAO,Hao BAN. Data⁃filtering method for driving behavior based on vehicle shared autonomy [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 589-599. |
| [14] | Xian-yi XIE,Yu-han WANG,Li-sheng JIN,Xin ZHAO,Bai-cang GUO,Ya-ping LIAO,Bin ZHOU,Ke-qiang LI. Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 620-630. |
| [15] | Xiao-lin DENG,Fu-mo YANG,Shan-gan QIN. Comparative analysis on crashworthiness of a novel bamboo⁃like hexagonal gradient hierarchical multicellular tube [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 333-345. |
|
||